摘 要
随着工业自动化的发展的需要,机械手在工业应用中越来越重要。文章主要叙述了机械手设计及计算过程。首先,本文介绍机械手的作用,机械手的组成和分类,说明了自由度和机械手整体座标的形式。同时,本文给出了这台机械手的主要性能规格参量以及介绍了搬运机械手的设计理论和方法,全面详尽的讨论了搬运机械手的手部、手臂以及机身等主要部件的结构设计。最后使用软件对机械手的手部实现了运动仿真。
关键词:机械手;运动仿真;机械传动;
ABSTRACT
With the needs of the development of industrial automation, robots are becoming increasingly important in industrial applications. This paper mainly describes the design and the calculation process of the manipulator. First, the role of the manipulator, the composition and classification of the manipulator are introduced as well as the degree of freedom and ordinates of the manipulator. Meanwhile, in this thesis, the main performance specifications and parameters of the manipulators are mentioned. Besides,this article introduces the design theory and methods of carrying manipulator and also comprehensive and detailed information which discusses the carrying manipulator hand,, arm, and the fuselage structure design of main parts. Finally, it states the using software of manipulator hand movement stimulation.
Key Words: Manipulator; movement stimulation; mechanical transmission
目 录
第一章 绪 论…………………………………………………………………………1
1.1 前言………………………………………………………………………………1
1.2 工业机械手的简史………………………………………………………………2
1.3 工业机械手在生产中的应用……………………………………………………3
1.4 机械手的组成……………………………………………………………………4
1.4.1执行机构……………………………………………………………………4
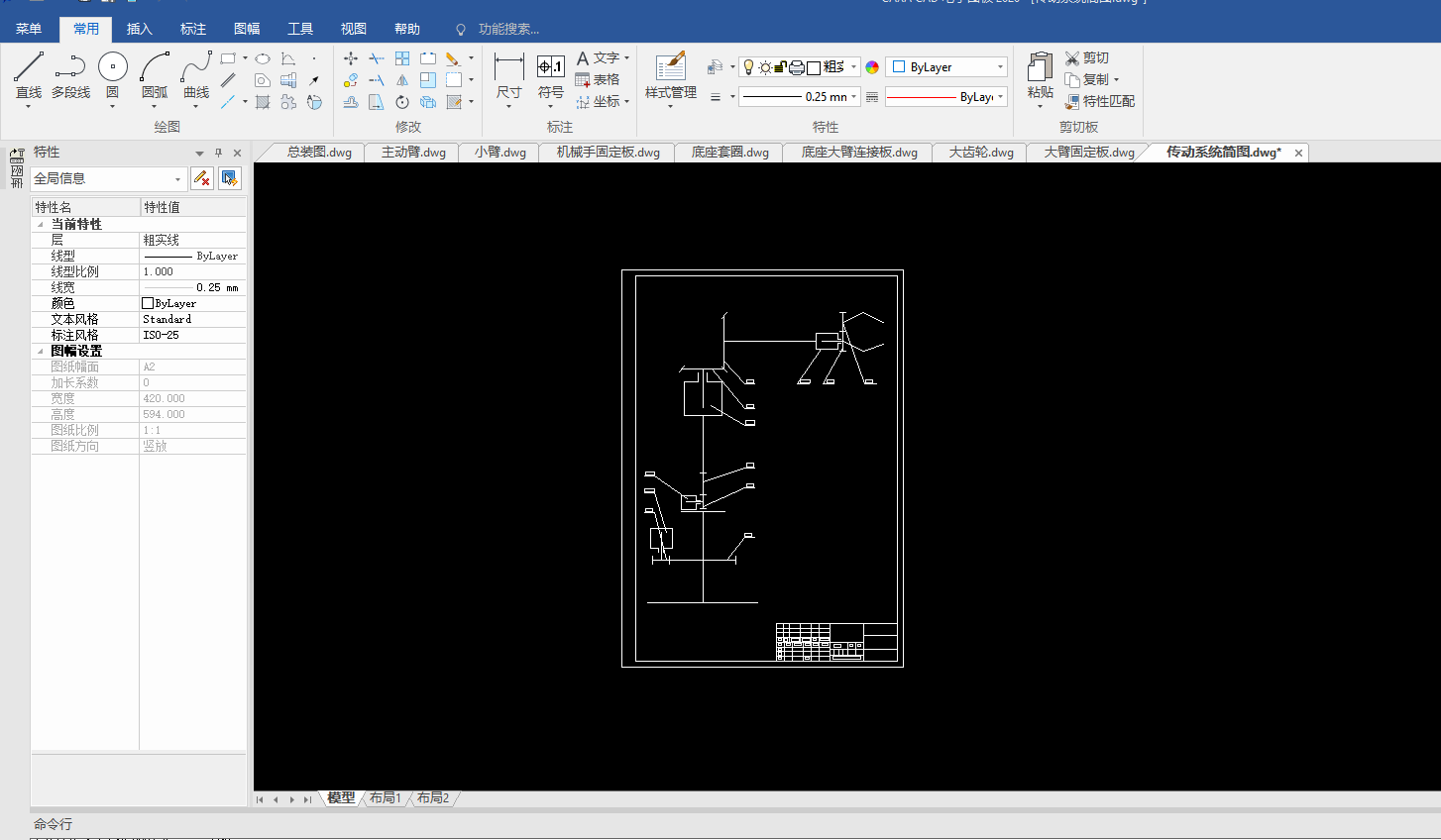
1.4.2驱动系统……………………………………………………………………6
1.4.3控制系统……………………………………………………………………6
1.4.4位置检测装置………………………………………………………………6
1.5 工业机械手的分类………………………………………………………………7
1.5.1按用途分……………………………………………………………………7
1.5.2按驱动方式分………………………………………………………………7
1.5.3按控制方式分………………………………………………………………8
1.6 工业机械手的发展趋势…………………………………………………………9
1.7 工业机械手的自由度和座标型式………………………………………………10
1.8 本文主要研究内容………………………………………………………………12
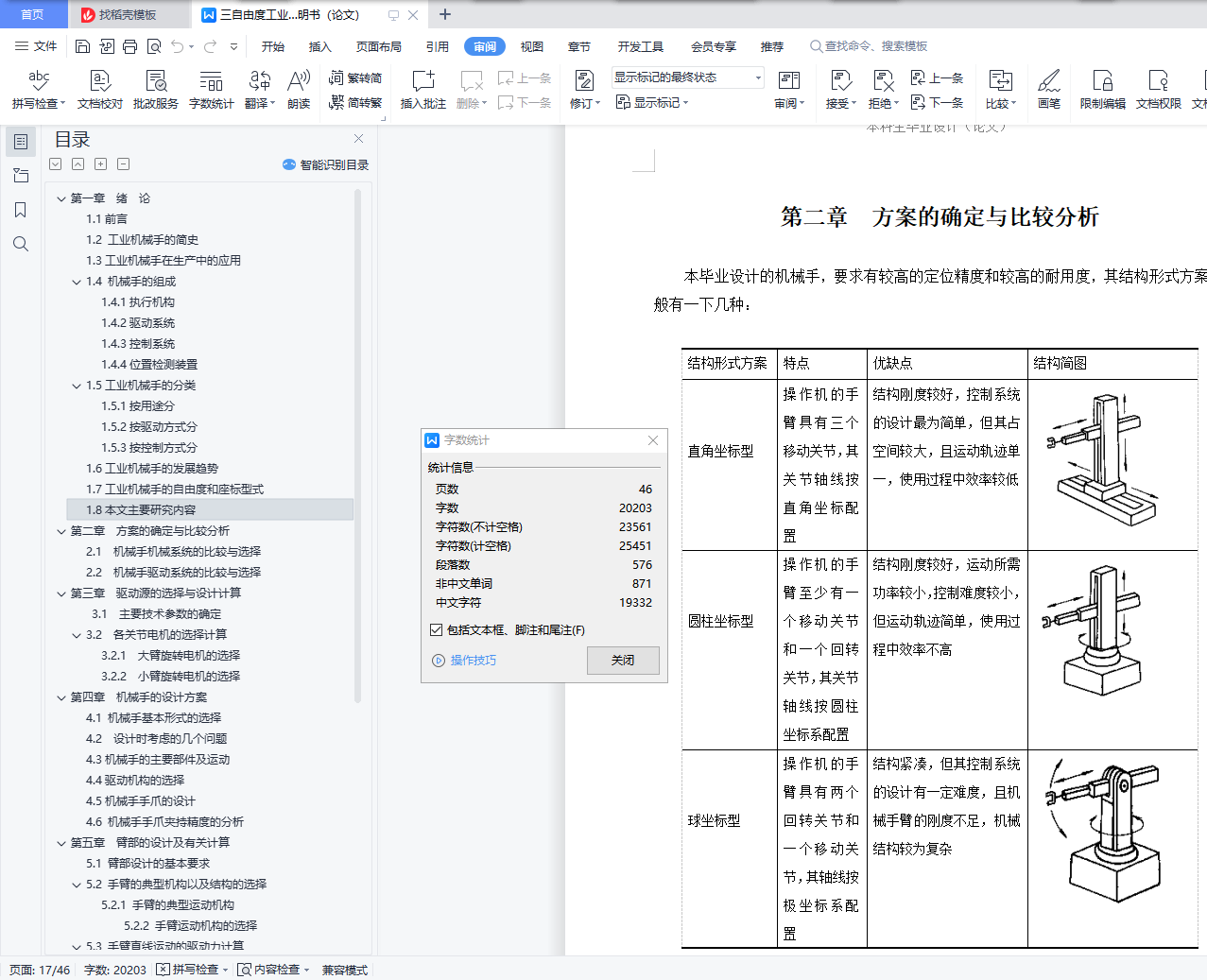
第二章 方案的确定与比较分析……………………………………………………12
2.1 机械手机械系统的比较与选择…………………………………………………12
2.2 机械手驱动系统的比较与选择…………………………………………………15
第三章 驱动源的选择与设计计算…………………………………………………17
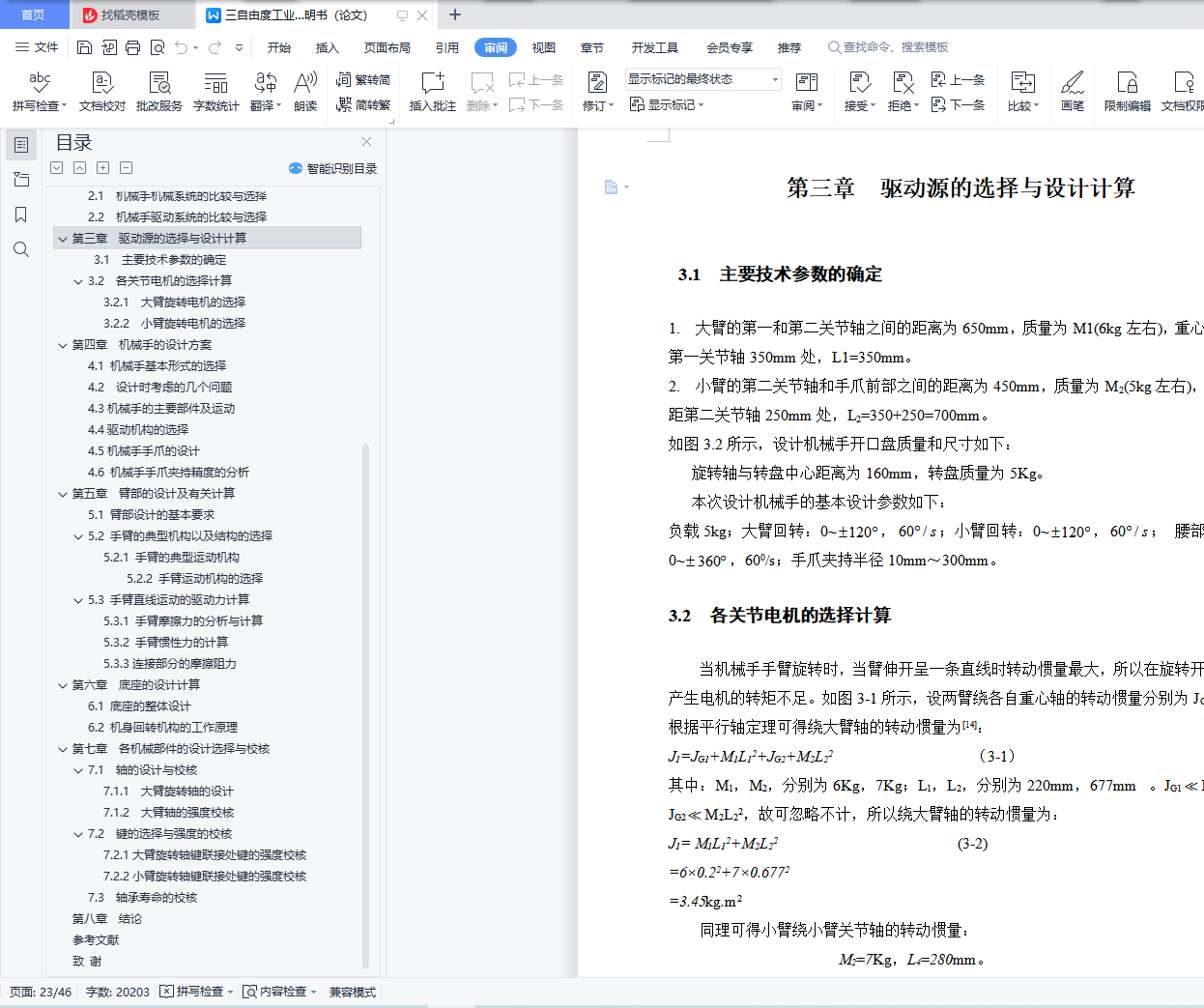
3.1 主要技术参数的确定……………………………………………………………17
3.2 各关节电机的选择计算…………………………………………………………18
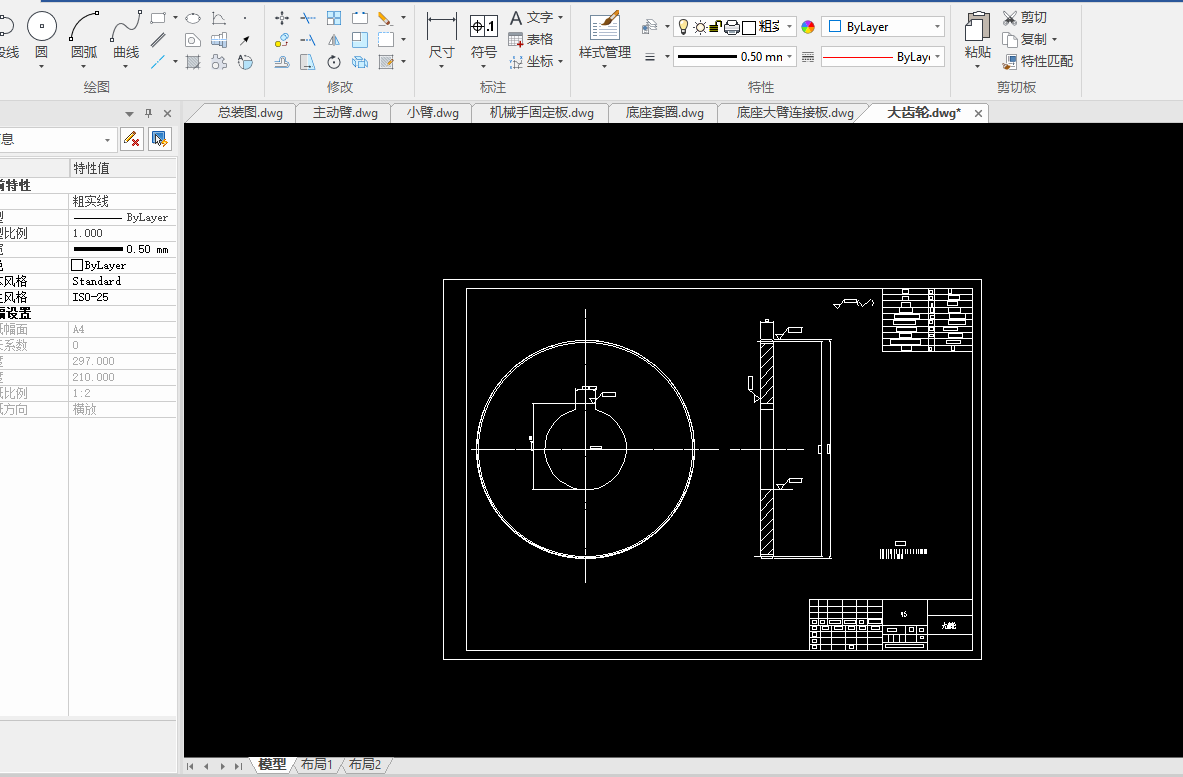
3.2.1 大臂旋转电机的选择……………………………………………………19
3.2.2 小臂旋转电机的选择……………………………………………………20
第四章 机械手的设计方案…………………………………………………………21
4.1 机械手基本形式的选择…………………………………………………………21
4.2 设计时考虑的几个问题…………………………………………………………21
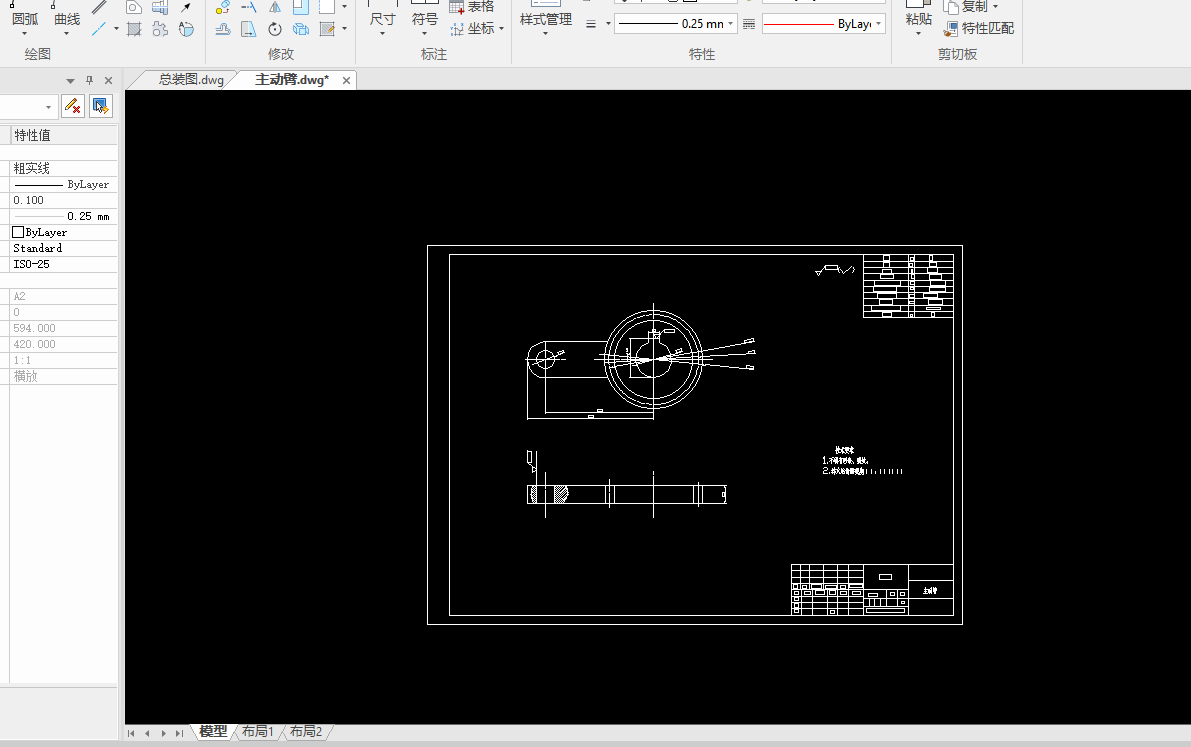
4.3 机械手的主要部件及运动………………………………………………………22
4.4 驱动机构的选择…………………………………………………………………22
4.5 机械手手爪的设计………………………………………………………………23
4.6 机械手手爪夹持精度的分析……………………………………………………23
第五章 臂部的设计及有关计算……………………………………………………24
5.1 臂部设计的基本要求……………………………………………………………24
5.2 手臂的典型机构以及结构的选择………………………………………………25
5.2.1 手臂的典型运动机构………………………………………………………25
5.2.2 手臂运动机构的选择………………………………………………………25
5.3 手臂直线运动的驱动力计算……………………………………………………25
5.3.1 手臂摩擦力的分析与计算…………………………………………………26
5.3.2 手臂惯性力的计算…………………………………………………………27
5.3.3 连接部分的摩擦阻力………………………………………………………27
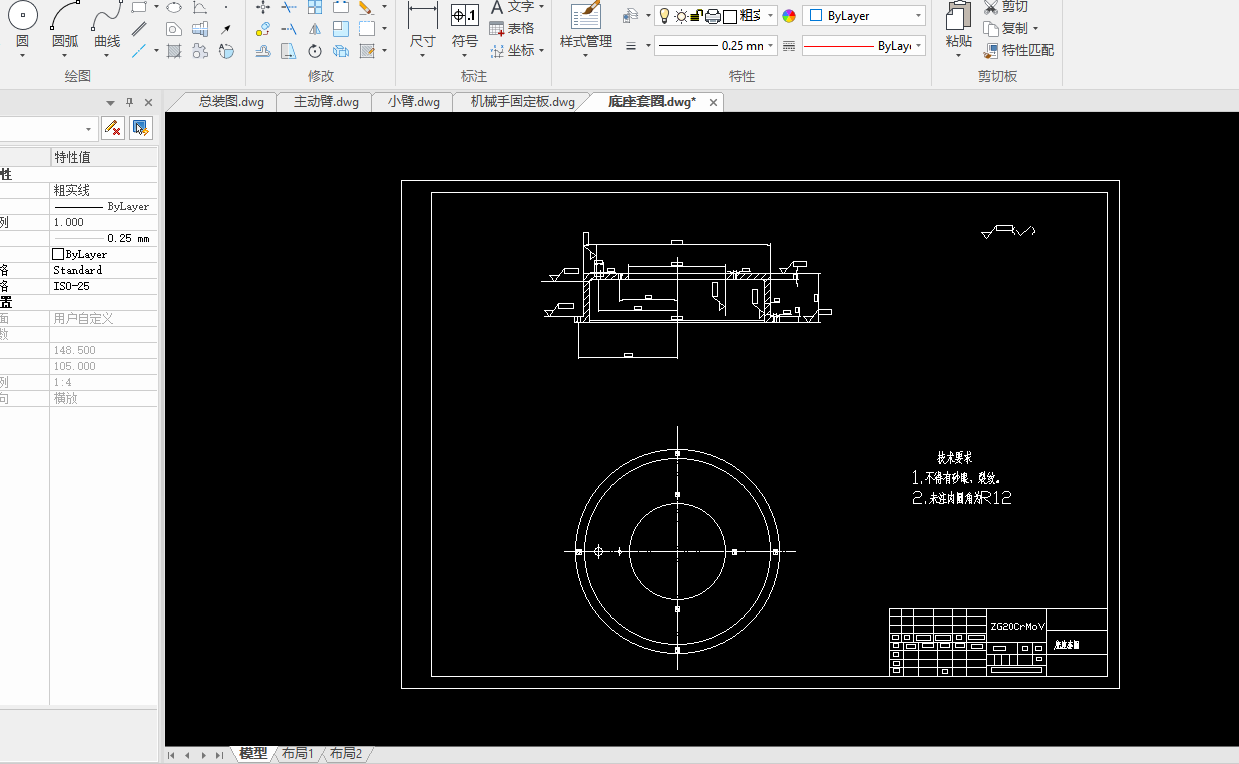
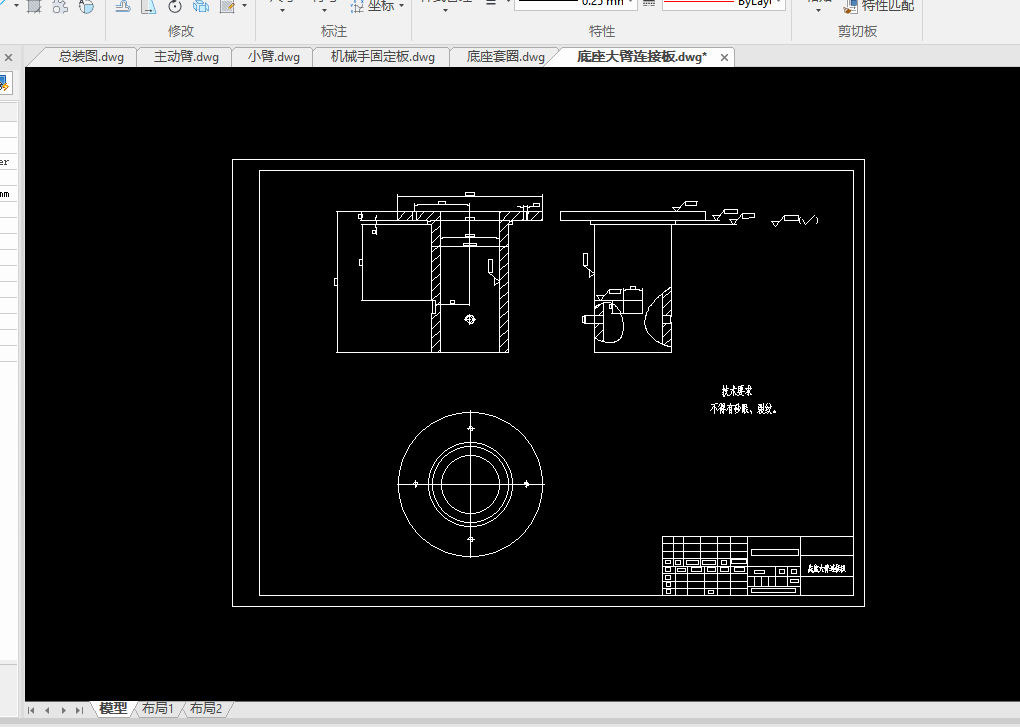
第六章 底座的设计计算……………………………………………………………27
6.1 底座的整体设计…………………………………………………………………28
6.2 机身回转机构的工作原理………………………………………………………28
第七章 各机械部件的设计选择与校核…………………………………………29
7.1 轴的设计与校核…………………………………………………………………29
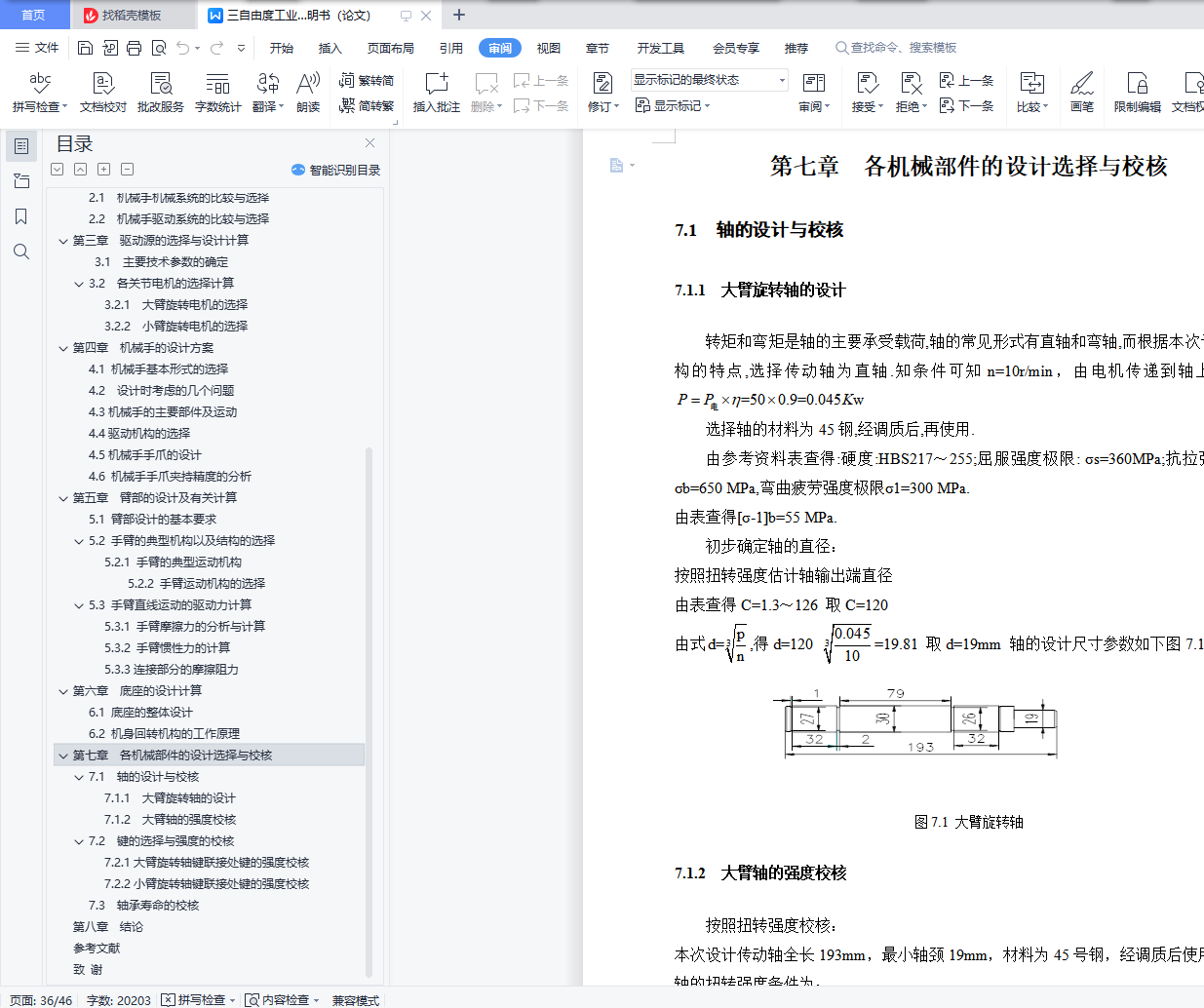
7.1.1 大臂旋转轴的设计………………………………………………………29
7.1.2 大臂轴的强度校核………………………………………………………29
7.2 键的选择与强度的校核…………………………………………………………33
7.2.1大臂旋转轴键联接处键的强度校核………………………………………33
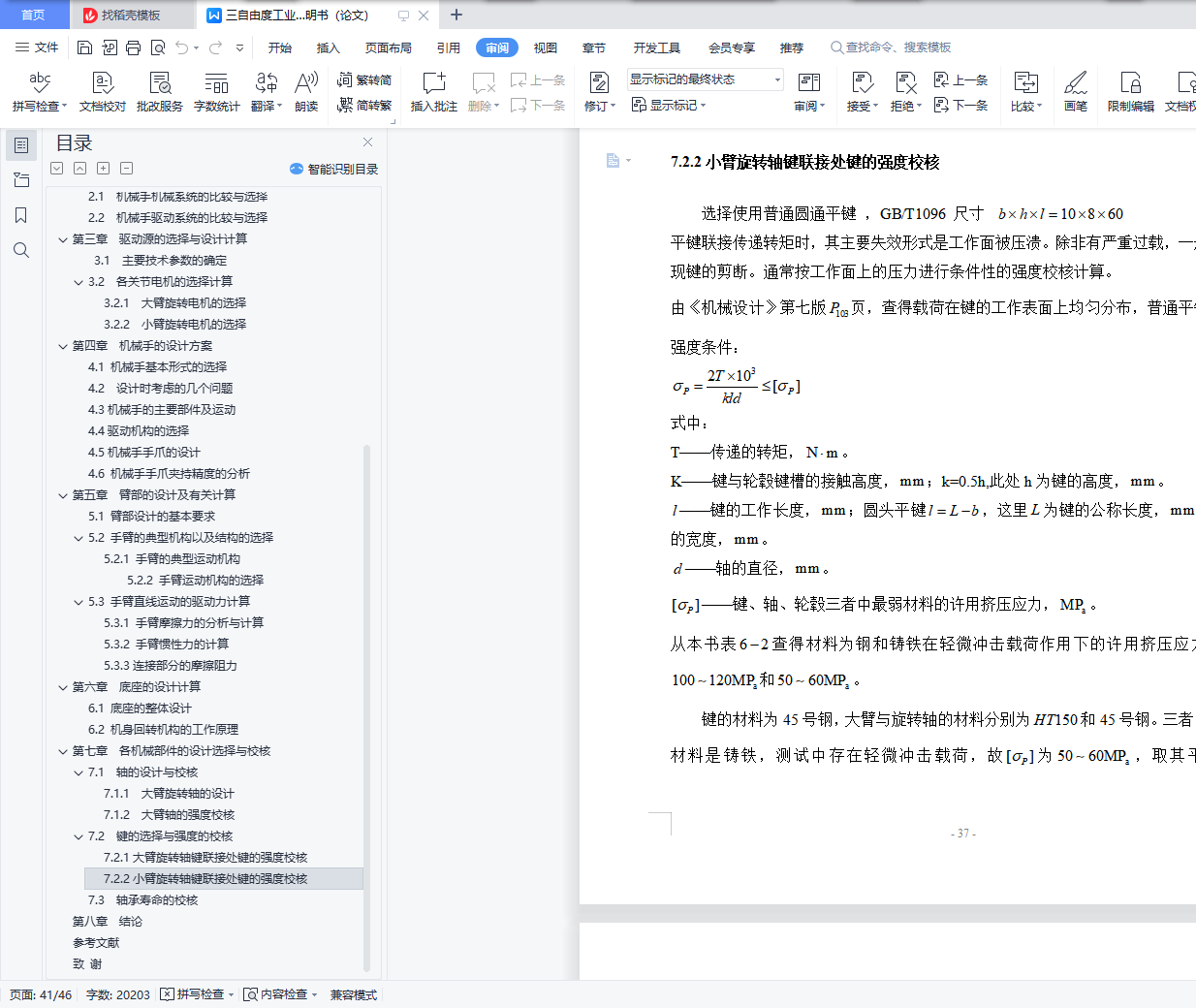
7.2.2小臂旋转轴键联接处键的强度校核………………………………………34
7.3 轴承寿命的校核…………………………………………………………………35
第八章 结论……………………………………………………………………………37
参考文献……………………………………………………………………………………38
致 谢………………………………………………………………………………………39