目录
1. 作业概要
2. 原理及实现
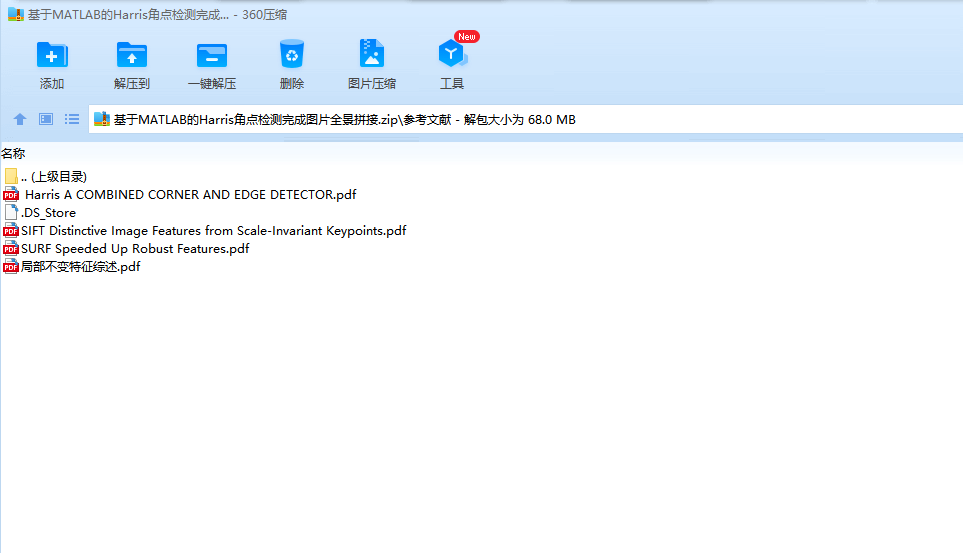
2.1. 模块1 Harris角点检测
4. 根据角点响应函数计算每个像素点的角点响应值;
2.2. 模块2 关键点的描述及其匹配
2.2.1. 生成描述向量
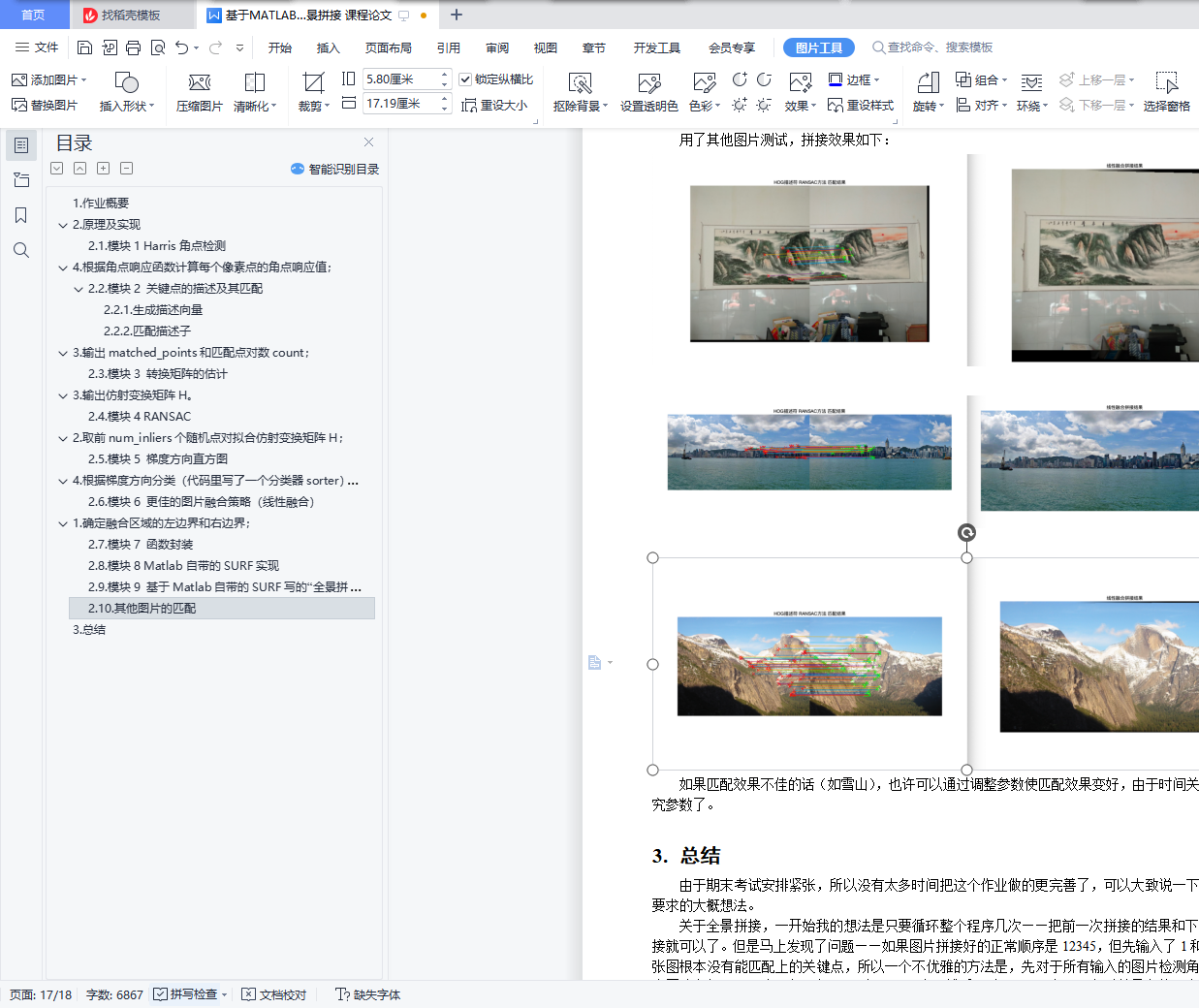
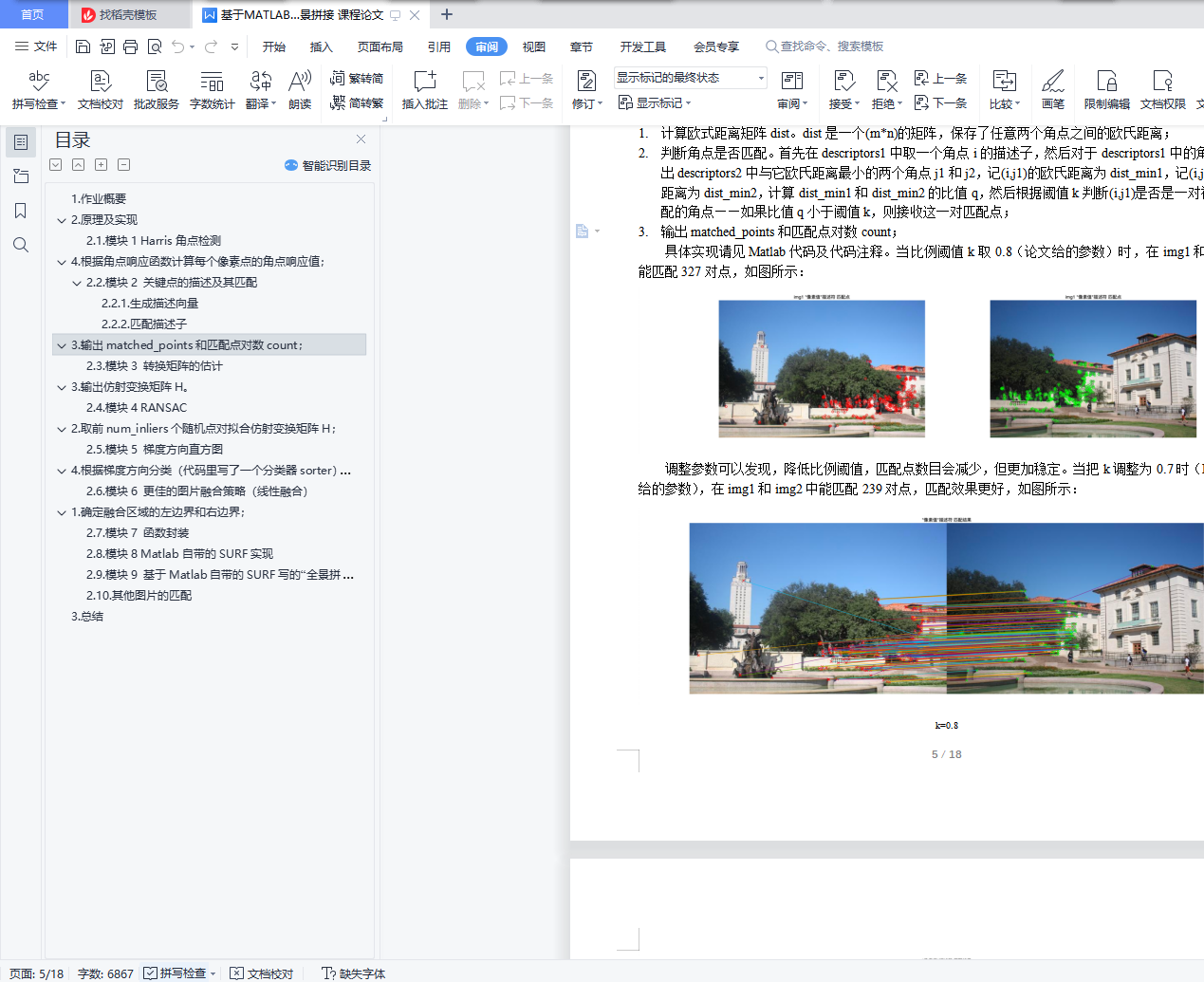
2.2.2. 匹配描述子
3. 输出matched_points和匹配点对数count;
2.3. 模块3 转换矩阵的估计
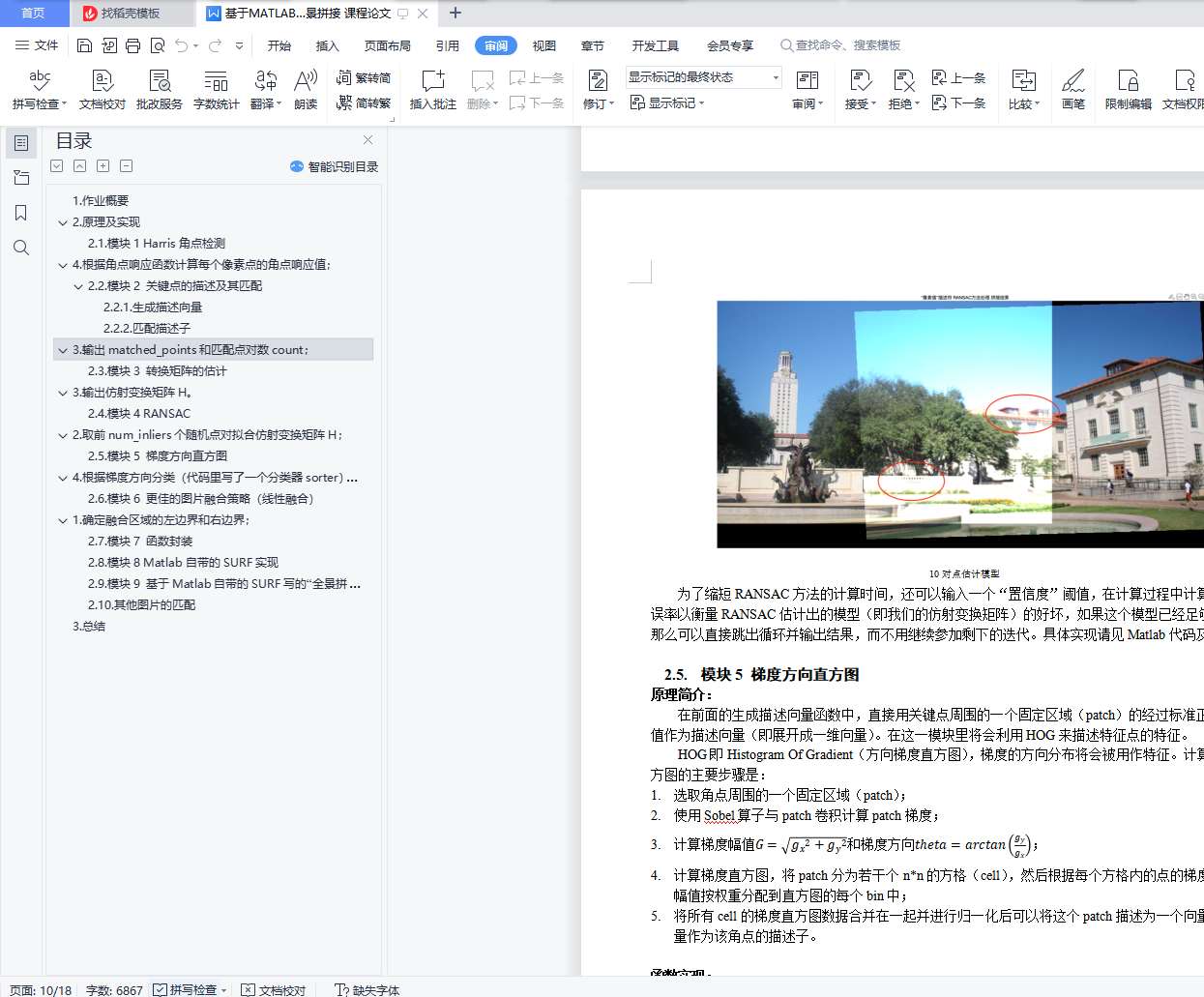
3. 输出仿射变换矩阵H。
2.4. 模块4 RANSAC
2. 取前num_inliers个随机点对拟合仿射变换矩阵H;
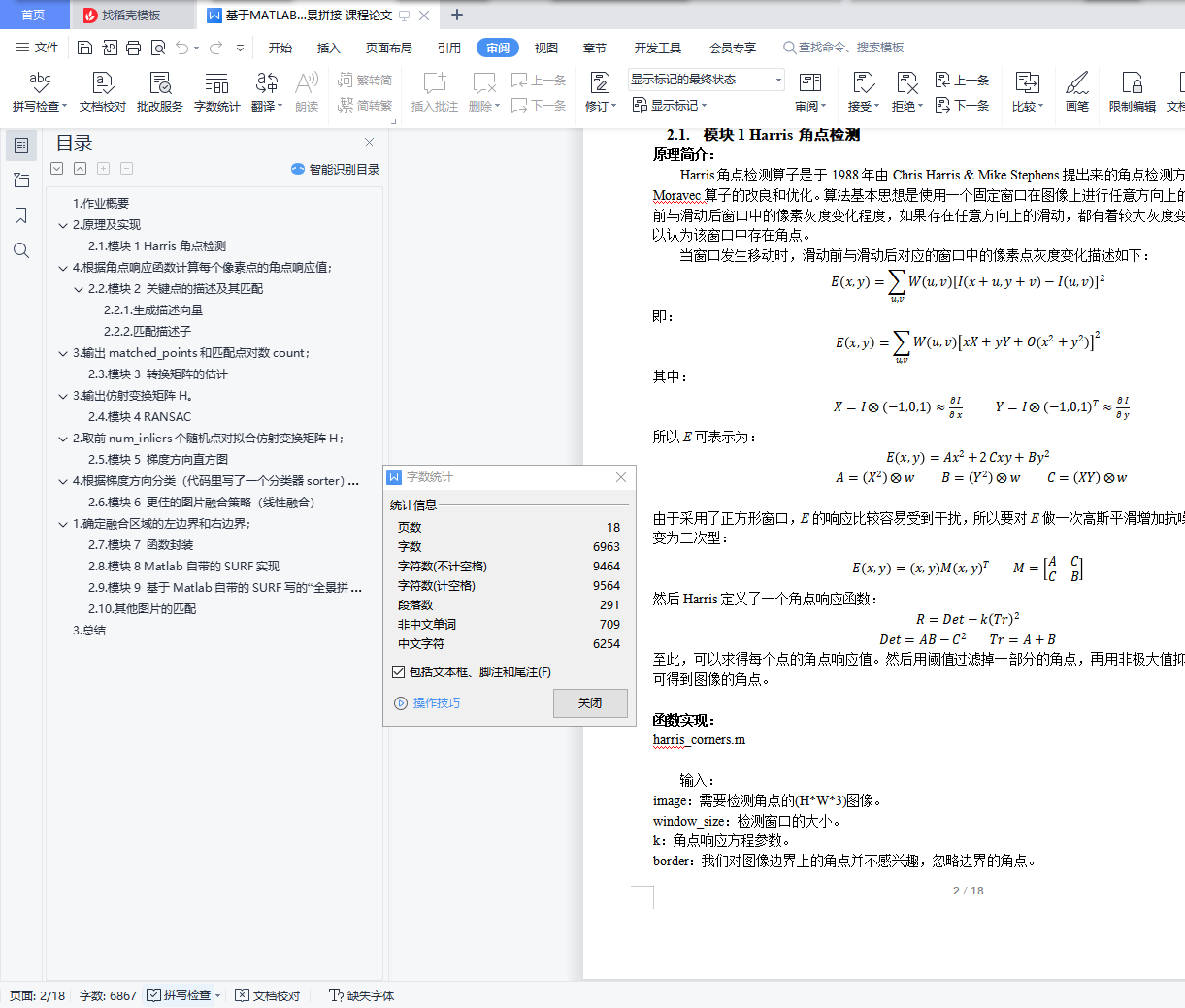
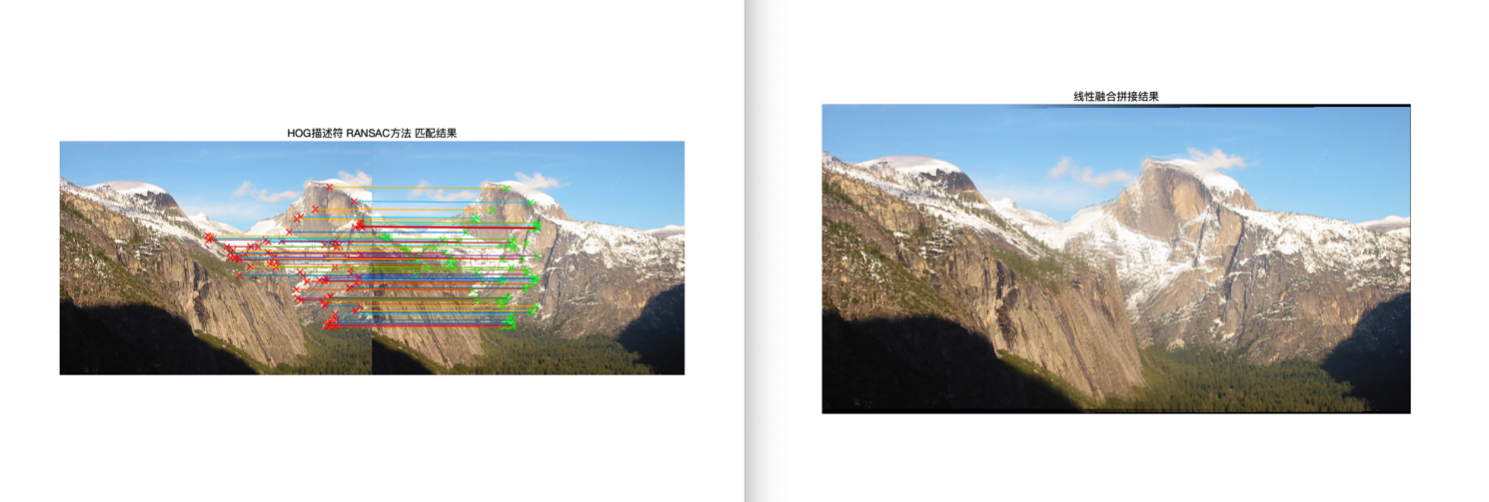
2.5. 模块5 梯度方向直方图
4. 根据梯度方向分类(代码里写了一个分类器sorter);
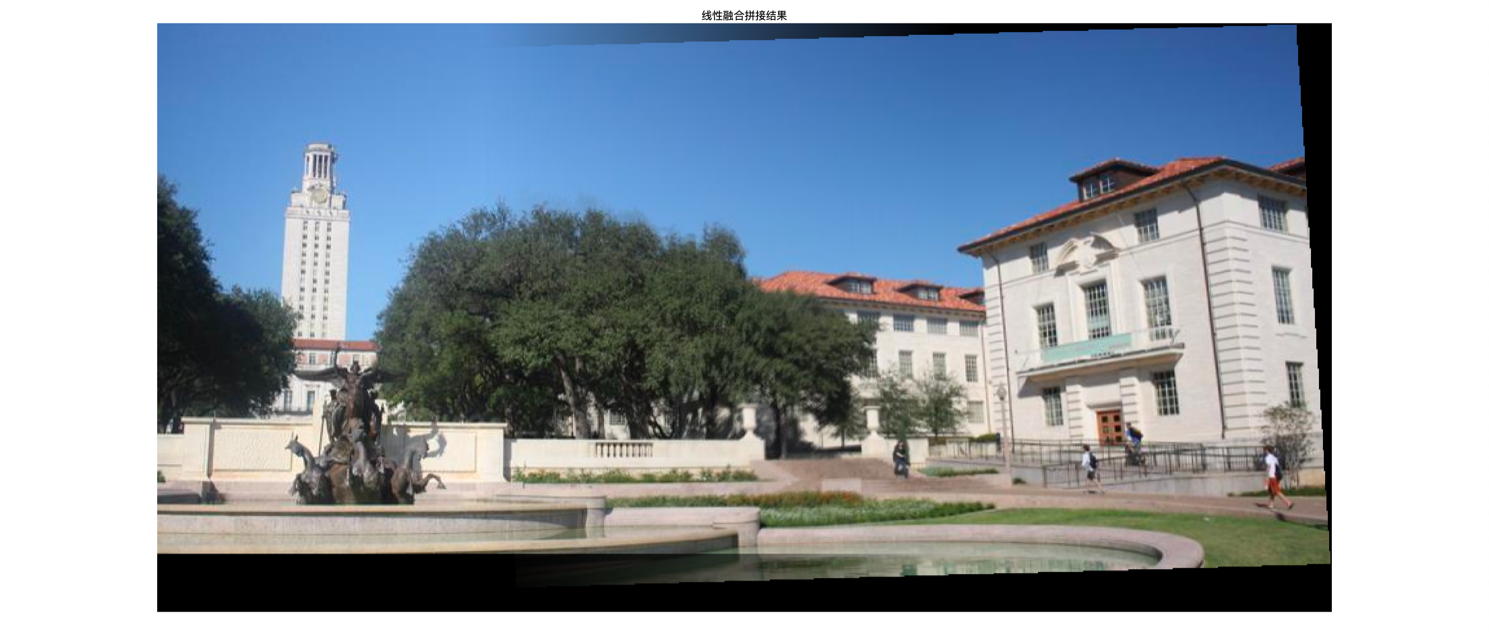
2.6. 模块6 更佳的图片融合策略(线性融合)
1. 确定融合区域的左边界和右边界;
2.7. 模块7 函数封装
2.8. 模块8 Matlab自带的SURF实现
2.9. 模块9 基于Matlab自带的SURF写的“全景拼接”
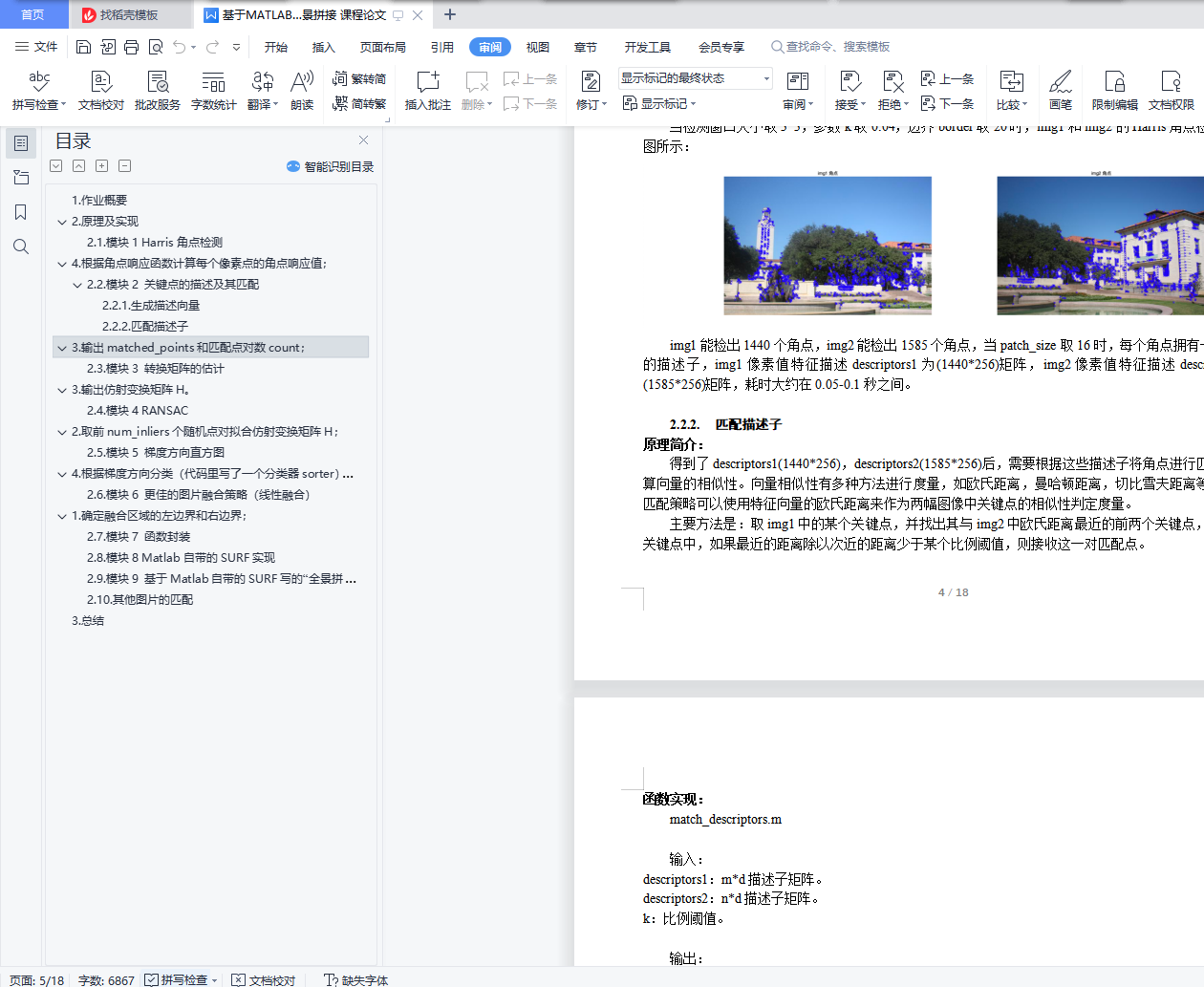
2.10. 其他图片的匹配
3. 总结
1. 作业概要
本次作业主要包含了Harris角点检测,RANSAC以及HOG描述符,最终将会利用这些工具来完成全景拼接。本文主要对本次图像拼接的实现做解释说明。
2. 原理及实现
2.1. 模块1 Harris角点检测
原理简介:
Harris角点检测算子是于1988年由Chris Harris & Mike Stephens提出来的角点检测方法,实质上是对Moravec算子的改良和优化。算法基本思想是使用一个固定窗口在图像上进行任意方向上的滑动,比较滑动前与滑动后窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点。