水果采摘装置研究设计
摘要
水果采摘装置,包括一个水管、临近终点的耦合方式以及适合附件的的真空装置。窄路部分包括内部和外部所提供的套管,内部套管在末端有一个开放式水果接收器,水果接收器的内部有一个灵活的开放式的锥形接受部分。向内收敛的锥形部分的最小直径大于正在收获的果实的直径。一半刚性圆柱取决于从内心融合的圆锥部分和耦合锥形一端或其部分向内收敛。吸入开口是沿着刚性圆柱部分里面接近圆锥形部分,锥形部分一般灵活耦合刚性圆柱底部形成开放式水果接收。第二个灵活装置形成一个真空封闭吸入式开口。外套筒内套筒固定轴向间距对点两侧的吸入式开口处理来说意味着定义一个端口被安排在外面的外壁耦合的管道。
研发背景
在日本,樱桃水果是要靠人工小心的收获的。由于樱桃水果的采摘期很短,采摘工作要集中在短期内完成,再加上劳动力短缺,这些都限制了樱桃水果的种植亩数。此外,樱桃水果树很高,采摘需要用到梯子。这使得采摘工作既危险又效率低。为了节约劳动力,樱桃水果收获机器人以实验研究为目的而设计,并且其初步实验取得了成功。果蔬收获机器人的调查研究已经取得了一定的成功。之前发布的果蔬收获机器人大多装备的是摄影机,水果的图像要通过与背景的颜色区别或特殊的反射比才能被辨别出来;水果的三维定位则通过双目立体视觉或视觉反馈控制系统估计得出。三维视觉传感器的应用也有相关报道。这种三维视觉传感器的优势在于其图像的各个图元都具有其间距信息。利用这一优点,目标物体能通过其三维形状被认出。对于樱桃水果采摘工作而言,这一功能有效的使水果在采摘过程中避免碰撞到叶子、茎等障碍物。为了成功的完成采摘动作,有效的辨别障碍物和红色的成熟的果实是至关重要的。为此,三维视觉系统配备了两个激光二极管。一个二极管发出红色的光线,另一个发出红外光束。为了避免太阳光的干扰,机器人使用半导体位置光敏传感器来探测反射光。半导体位置光敏传感器的信号组件接收高频率闪烁的激光光线来区分出太阳光。激光束扫描得出被测物体的三维模型,并通过红光和红外光线间特定的反射光的特征来区别于其他物体从而分辨出红色的果实。机器人需要在果园各种环境(温度、日照等)中准确、高效地,在不破坏果实和果树枝丫的情况下进行采摘任务。樱桃水果树大多种植多雨地区,需种植在大棚内来阻挡雨水。机器人在大棚里工作,不需要暴露在风雨中。 樱桃水果不论在鲜果市场还是用于加工都必须连樱桃水果梗一起采摘。就人工采摘来说,农民们用手指抓住樱桃水果梗上部将其向上提起从树上摘下。因为这个理由,设计并进行实验使机器人来像农民一样抓住樱桃水果梗的上部并将其向上提起从树上摘下。
本发明通常涉及到一种收集水果和坚果的改进装置,其中真空部分、耦合了一个灵活的窄路也就是说从树上摘除果子,然后存放到收集装置中。本仪器的发明利用真空作为动力的来源,利用该装置采摘水果非常轻松。
采摘水果,包括水果及坚果,经常需要利用机械技术,这将代替个人用手从树上采摘的需要。对于某些水果,手采通常是为了让避免采到有瑕疵的水果。当然,这样的手采方式花费高,速度慢,而且这些高成本都会转嫁给水果消费者。
在过去,各种不同的水果采摘方法已经被应用,然而这些装置通常使用复杂的机电设备包括硅光电池传感器和像定位水果位置的机械手臂来采摘水果。这些装置在提高采摘效率的同时不可避免的增加了伤害新鲜水果的风险。
然而,根据本发明可以将采摘伤害果实的风险降到最低以及没有必要离开地面一个工人就能完成采摘。该设备简单,重量轻,可以从地面通过一个合适的延伸棒或者类似的东西处理。
本发明概要
因此,本发明提供了一种改进的水果收集采摘装置,这种设计的装置可以将水果或坚果轻轻的从树上采摘下来。
它是一个进一步改进了的采摘水果和坚果的装置,此设备的操作及供电都由一个简单的真空源提供。它也对现有采摘水果装置进行了一种改进,利用了没有机械运动部件的结构。其它的装置以及本发明将进一步显现在对艺术的研究及下列规格、附加要求及相应的图纸上。
绘图简介
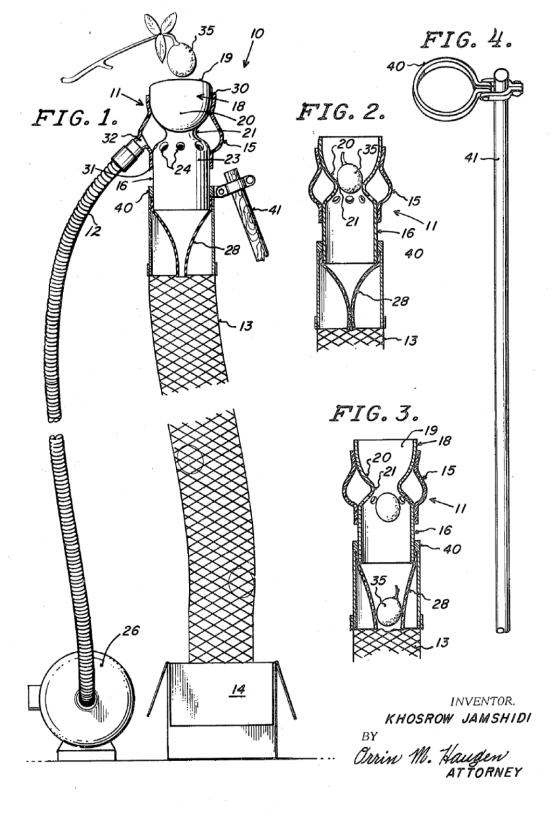
图1是一个整体视图,说明了部分原理及水果坚果收集装置,并说明仪器有一条长方形水果传输管道提供采摘的收集装置。
图2是一个细节图,显示了部分截图,说明了从树上采摘水果的装置的结构。
图3类似于图2,说明了采摘单个果实通过采摘器头部结构的过程。
图4是一个头部试图,说明了采摘器头部延伸棒的可释放连接方式。
三维视觉传感器上装备了一个发光器、一个光电探测器和一个扫描装置(图3)。发光器由一个红外线激光器组件、红色激光组件、一个冷片、一个半反射镜和两个反射镜构成。光电探测器有两个半导体位置光敏传感器、一个镜头和一个用于减少阳光影响的红色滤光器构成。扫描装置由一个电流计光电扫描装置和一个步进电机构成。电流计光电扫描装置竖直扫描物体,步进电机水平扫描物体。红色和红外线激光束通过冷片集中在同一发射和正面反射光轴。光线在远处通过半反射镜被分为两股(每一股都仍包含两种光的波长)。这两股光同时扫描物体。从被扫描物体上反射的两股光线聚焦在两个半导体位置光敏传感器上。三维视觉传感器与被扫描物体的距离可利用半导体位置光敏传感器检测到的返回电流和两光束的电流间的比率通过三角形法被计算出来。激光束发出闪烁的信号来消除太阳光对结果的影响。用这种方法,反射光会从太阳光中分离出来,形成连续的光。
波长为700-1000nm的红外光能在樱桃水果树的任意部分良好反射。另一方面,波长为690nm红色光线不能被未成熟的果实、叶子和茎秆良好反射而能被红色的成熟樱桃水果良好反射。研究中表明,波长为830nm的红外光和波长为690nm的红光是最合适的。红外激光(830nm)测量从三维视觉传感器返回的樱桃水果树每一部分的距离,红色激光(690nm)检测可收获的红色成熟果实。
如上所述,激光光束分成两股光线。三维视觉传感器同时扫描这两束光线,两个像素点同时测量以提高扫描速度。其像素为50,000(垂直方向250,水平方向200)。其扫描时间是1.5秒。视野为垂直方向43.8°和水平方向40.6◦。传感器的有效范围是170mm到 500mm。 如果对象离传感器过远,检测光被削弱,无法测得精确的数据。
激光束每次被反射的光被两个半导体位置光敏传感器接收检测。红光和红外信号从半导体位置光敏传感器发出的。分别接收红色和红外信号,红色和红外激光光源发出频率41.6kHz、相位移为90◦的闪烁光线。半导体位置光敏传感器发车的光电电流被放大。红光和红外光的信号被放大器锁定,分别检测,也能够消除环境光线的影响。三维视觉传感器可在即使为100 klx照度的阳光下使用。一个红色的像和一个红外光的像被供应给计算机,然后计算机获得一系列图像与细分图像。一系列的图像通过半导体位置光敏传感器的阳极A和B反馈的红外信号用三角形法的被计算生成。细分图像从红光和红外信号之间的比例得到。红色樱桃水果通过红色激光的反射率区别于树叶等其他物体。然而,树的主干以及红色的果实都反射红色激光束。因此,需要使用其他方式区别果实与其他物体。而当水果被镜面反射后,当他们被扫描,果实中心能良好是反射激光光束。然而,这种现象不发生在树干的表面。使用这种反射现象每个果实的中心将被认出。当三维视觉传感器可见果实的中心,果实可以用这种方法被认出。对这些图像进行处理,红色果实位置和树叶和树枝等障碍物都可被辨认出。
图4所示为所得图像的例子。一系列的图像通过三角测量法计算半导体位置光敏传感器中的红外信号得到。处理红外信号、红光信号和一系列图像,被扫描物体被划分为红色果实和其他物体。右图所示细分后显示的图像。
优选的具体化描述
正在看的视图1所指定的采摘装置通常设计成10所示样式,这包括设计成11的采摘头组件,采摘头被加上一个导管12,以及水果的导向窄路13。收集装置的形式是一个盒子就像14所示的样子。
在这里我们要特别之处采摘头11,该结构包括一个窄路,又一对同轴摆放的套筒所组成,包括外部管道15以及内部套筒16。内部组装的套筒16包括像18那样显示的窄路,这个窄路在19处有一个开放式水果接收器,而且在20处聚合了一个锥形部分。内部聚合锥形部分20有一个最小直径或收缩面积在21处,这个直径与收获的水果的直径大致相等。一般来说,这种收缩部件由柔性材质构成,使真空时它的收缩直径是可调的,这个直径相对于刚收获的水果的直径来说不会更大。
一般的刚性圆柱件23安排在依靠关系内部锥形部件20处,圆柱件23有多个吸入式开口24分布在其周边。这些开口能够适应允许流动空气通过,这流动是由真空操作所产生就像26所显示的那样。从中我们可以看到采摘头,另一个柔性部分,最好是一个锥形部分,就像28所示,这个部分被连接到刚性圆柱底部对立的圆锥部分里面。28部分会安排在自行关闭后,如果需要的话就像图2所示那样。对于大多数用途,部件28可制作柔软的聚乙烯,压力为导向的聚对苯二甲酸乙二醇酯,或如柔性薄膜物质。
继续关注图1,我们将看到套筒15抵押处置吸气开口24两侧轴向间隔的套筒16.这些密封区域出现在30和31。同时,意味着定义一个套筒壁15被安排在32上的部件,这些部分在采摘头11处被安排了一对套管12。
现在我们把注意力转向显示水果35的图2,这幅图显示一个水果刚刚进入20这个开放式内部聚合锥形窄路部分,水果的周长或表面积接触区域如图所示在21处。当绘制的水果在内部通过此系统时,真恐部分26的绘制或吸入结构在28处趋近于关闭。通过了开放式收缩部分21,水果将会掉入如图3所示的采摘头中。
因此开放式部件28可以适应间歇性的打开和关闭来回应绘制的真空结构,并回应阻塞窄路的受限制区域21。这种阻塞发生时,水果的路径是在目前的窄路区域。
为了缓解每个水果从才会在头部掉入收集箱的冲击,水果导向套管13被用作控制水果轻柔地存入收集箱比如说像14所示装置。这种方式可以免除水果收集时伤害到它的表皮或者果肉。
现在看图4,它的采摘头11会被像一个封闭环或者长杆41上的40所示的装置所保护。这种方式,可以让一个人在采摘水果和坚果时不必拿一个梯子爬到很高的地方去采摘而可以用手直接去采摘。
现在的详述已经讨论了怎样去收集水果,而水果这个词语也被用作一个通用的定义,旨在包括苹果之类的水果,柑橘类水果如柳橙、柠檬和酸橙以及桃子何梨。通过选择合适的窄路直径,坚果的收获都可利用此相同的原理。任何建筑用常规材料可以采用的设备,都可以作为此装置的塑料材料选择。内部聚合锥形部分20可以由模压塑料制成,如聚四氟乙烯,尼龙,乙烯或其他相似材料,而圆柱筒16材料也可以用相似材料制作。外部套管15是非常坚固的,它可以是任何想要的建筑材料来制作。
我要求:
1. 从树上采摘水果的装置包括:
a. 首先是临近第一部分终点管道的耦合方式以及所附带的真空源;
b. 采摘头窄路部分包括内部和外部管道部分,内部管道在其根部有一个开放式水果接收器,通常的柔性接收部分在其内部有开放式的内部聚合锥形部分,内部的聚合锥形部分的直径不会比收获的水果的直径要大,一般的刚性圆柱部分与内部聚合锥形部分的底部相组合,意味着定义吸入式开口以及刚性圆柱相毗邻的内部聚合锥形部分;
c. 第二个通常是柔性的锥形连接到刚性圆柱相对应的内部聚合锥形的底部,以适应聚合锥形部分形成一个灵活的关闭;
d. 外部套管被固定在内部套管轴向间距点相反方向来说明;
e. 这也意味着从定义上说,外环和耦合方式表示外环部分,第一节管道外壁上也有一个端口。
2. 果实收获装置如专利要求1所述,被特别描述的导向套筒固定刚性圆柱体,由此决定附上第二个锥形部分。
3. 从设计要求1所特别要求的水果采摘装置真空部分的第一节管道被安装一个真空吸入开口。
4. 从设计要求3所特别要求的水果采摘装置的第二个柔性锥形部分来适应通过开放式吸入真空自行关闭。
5. 专利要求1中所界定的水果采摘装置,特别是内部聚合锥形部分可以弹性变形。
