摘 要
在工业自动化生产中,无论是单机还是组合机床,以及自动生产流水线,都要用到搬运机器人来完成工件的取放。搬运机器人是近几十年发展起来的一种高科技自动化生产设备。搬运机器人的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
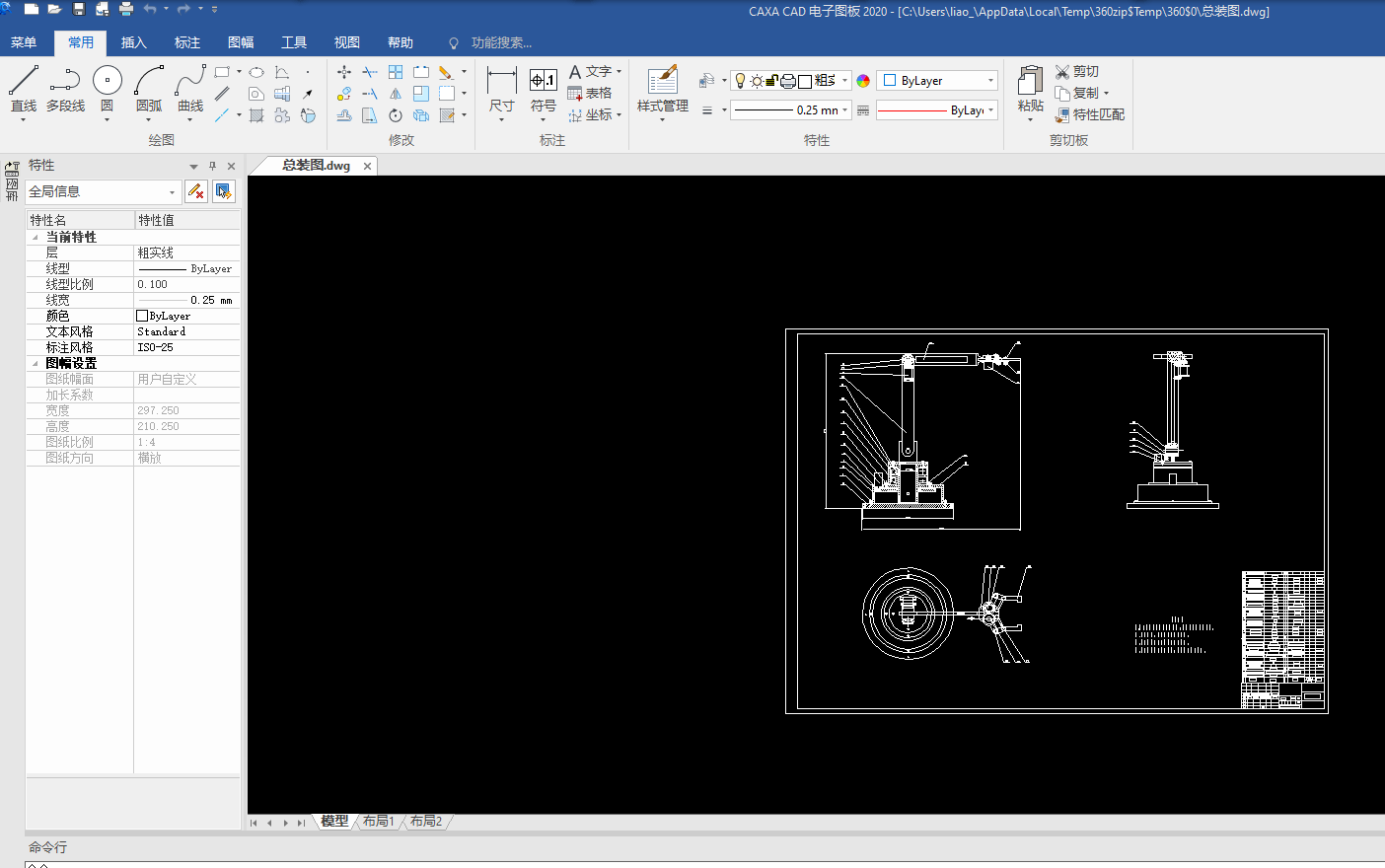
本次设计一款有3个自由度的搬运机器人前臂,完成总体方案及主要关节设计。可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。搬运机器人作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
关键词:三自由度;搬运机器人;前臂;关节;设计
Abstract
In the industrial automation production, whether the single machine or the combined machine tool, and the automatic production line, are used to carry the robot to complete the removal and release of the workpiece.Handling robots are a high-tech automated production equipment developed in recent decades.Carrying robots is an important branch of industrial robots.It is characterized by programming to complete a variety of expected job tasks, with the respective advantages of people and machines in construction and performance, especially reflecting human intelligence and adaptability.
This design of a handling robot forearm with 3 degrees of freedom, to complete the overall plan and the main joint design.It can be programmed to complete various expected job tasks, and in the construction and performance of the respective advantages of people and machines, especially reflecting the human intelligence and adaptability.The accuracy of the handling robot operation and the ability to complete the operation in various environments have broad development prospects in various fields of the national economy.
Key words: three degrees of freedom; handling robot; forearm; joint; design
目 录
摘 要
Abstract
第一章 绪 论
1.1选题背景及意义
1.2 搬运机器人的简史
1.3搬运机器人在生产中的应用
1.4本文主要研究内容
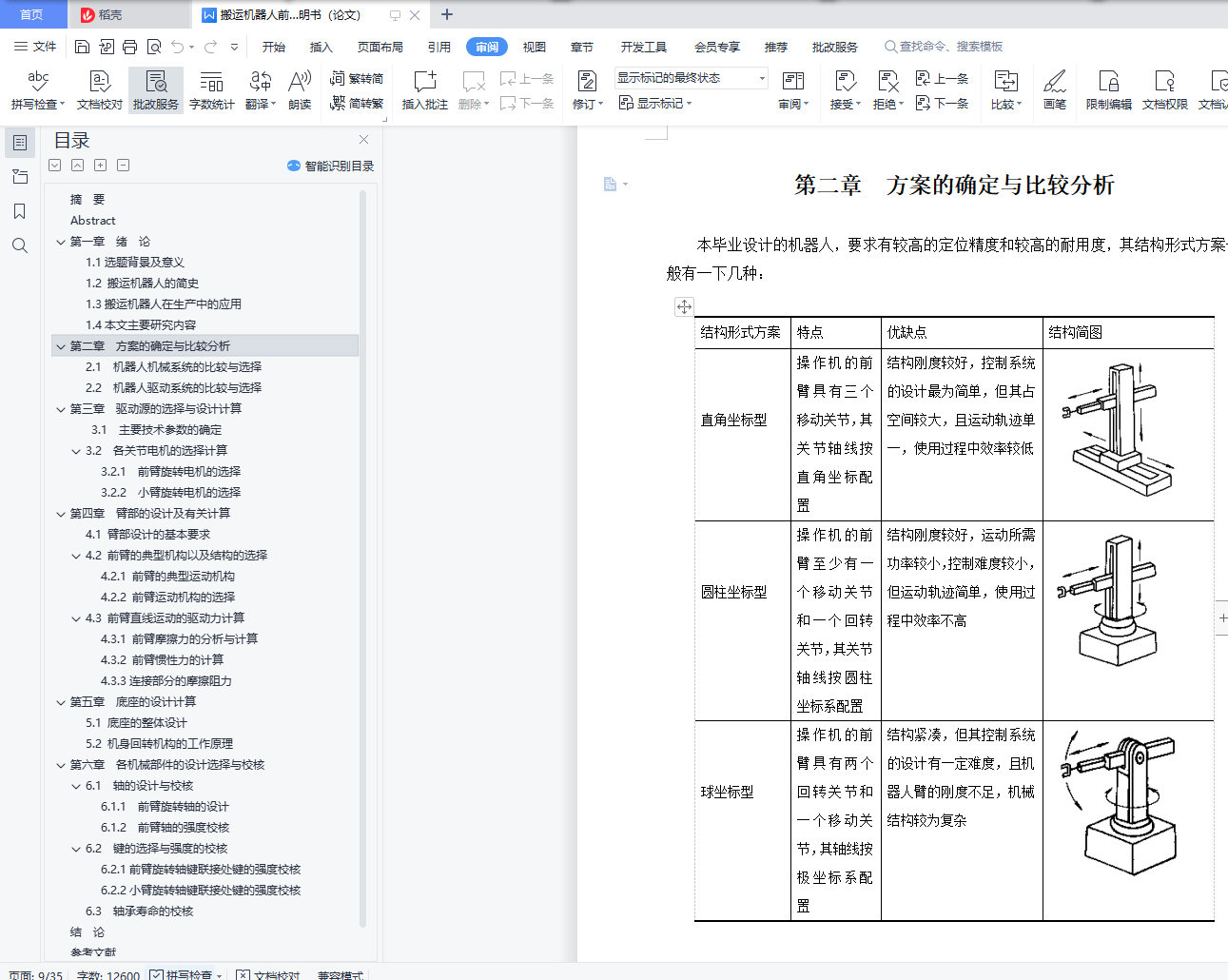
第二章 方案的确定与比较分析
2.1 机器人机械系统的比较与选择
2.2 机器人驱动系统的比较与选择
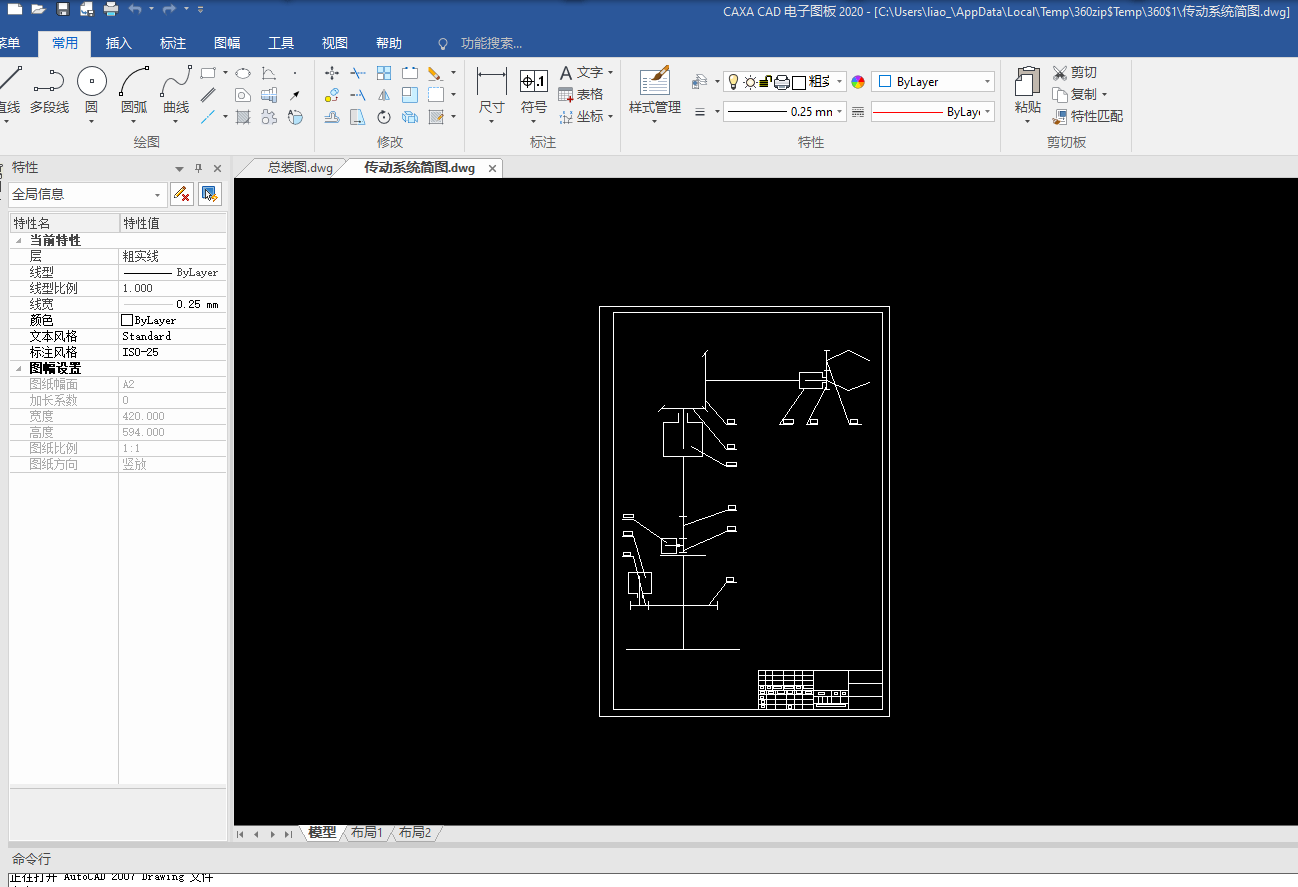
第三章 驱动源的选择与设计计算
3.1 主要技术参数的确定
3.2 各关节电机的选择计算
3.2.1 前臂旋转电机的选择
3.2.2 小臂旋转电机的选择
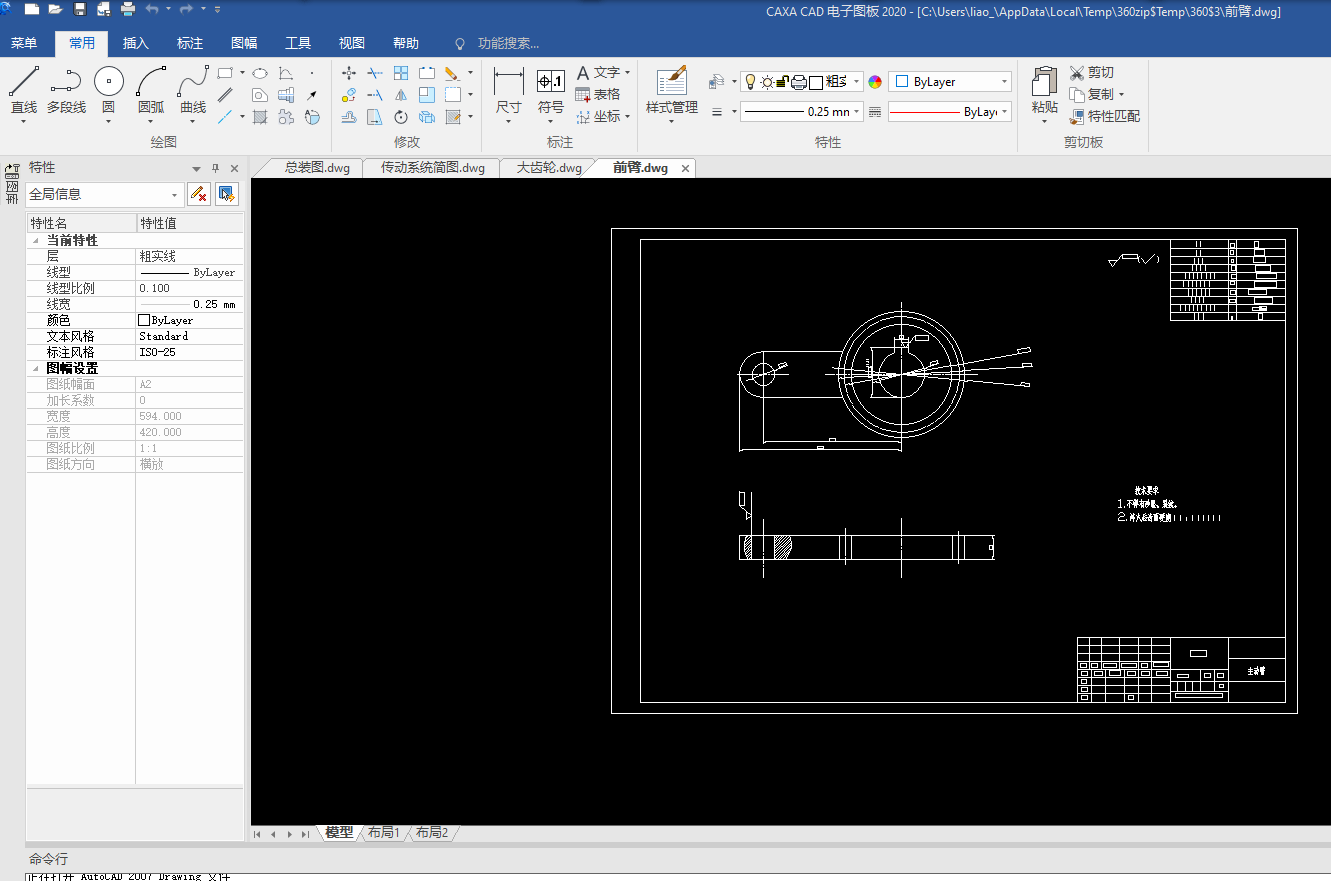
第四章 臂部的设计及有关计算
4.1 臂部设计的基本要求
4.2 前臂的典型机构以及结构的选择
4.2.1 前臂的典型运动机构
4.2.2 前臂运动机构的选择
4.3 前臂直线运动的驱动力计算
4.3.1 前臂摩擦力的分析与计算
4.3.2 前臂惯性力的计算
4.3.3连接部分的摩擦阻力
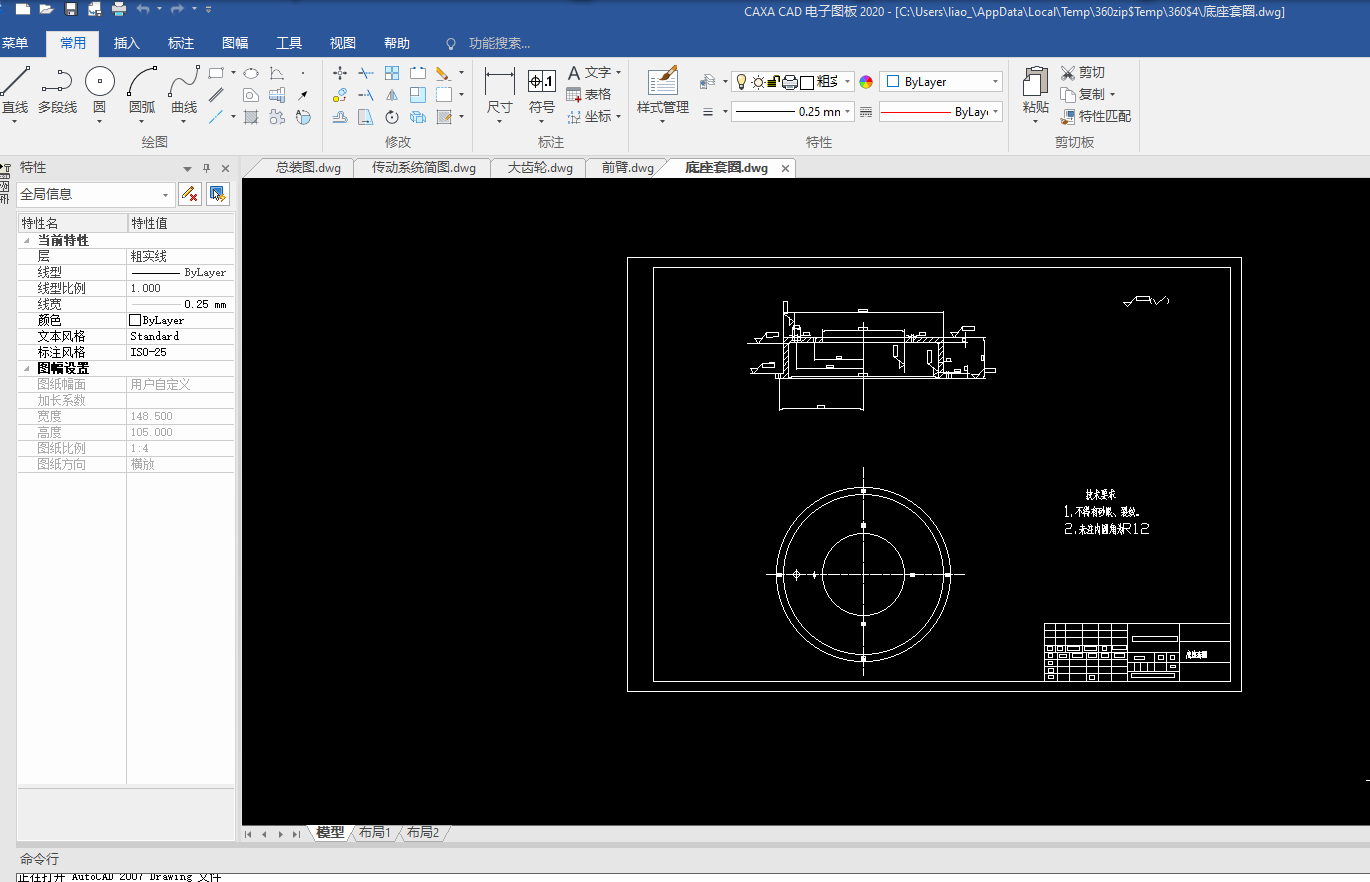
第五章 底座的设计计算
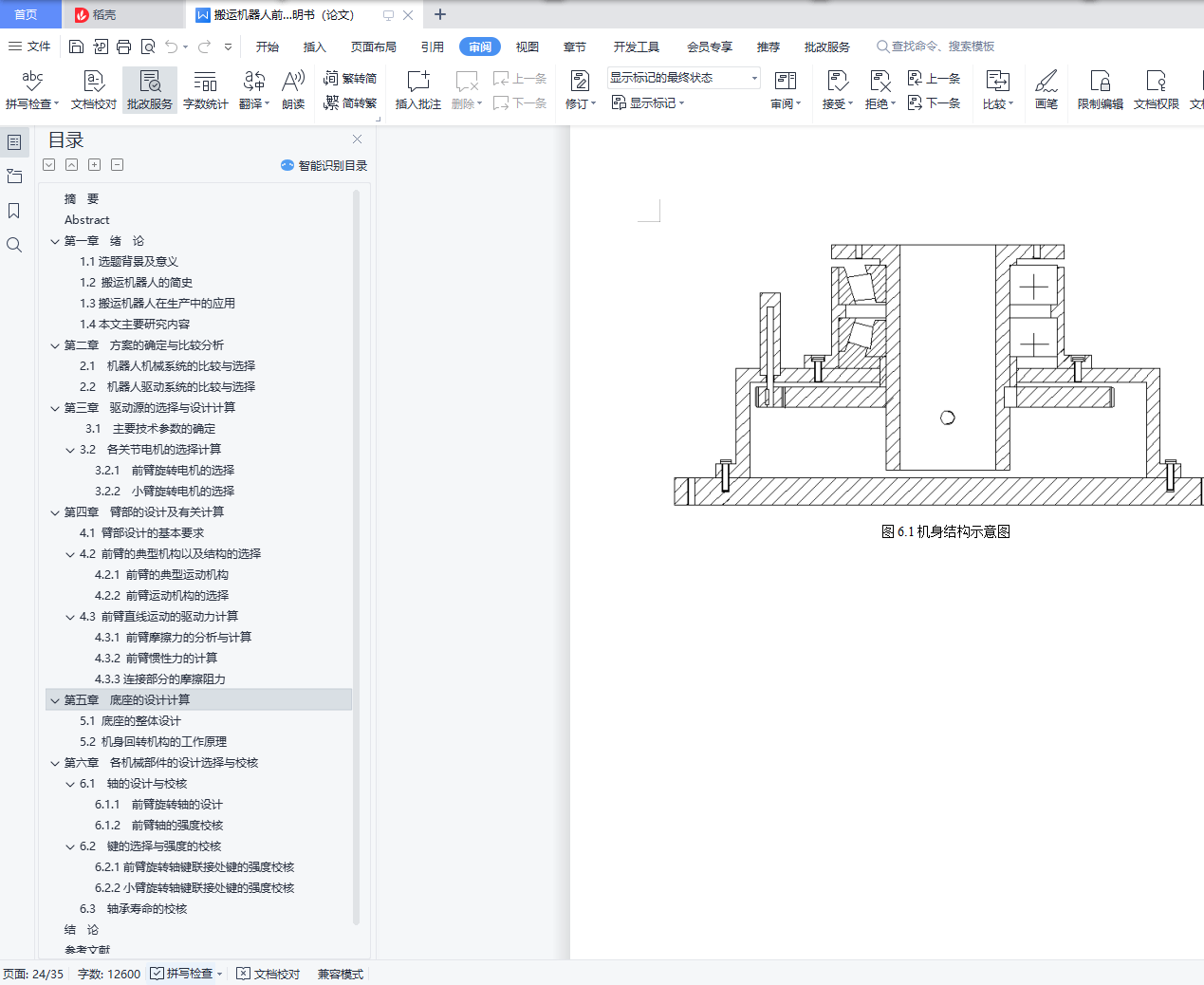
5.1 底座的整体设计
5.2 机身回转机构的工作原理
第六章 各机械部件的设计选择与校核
6.1 轴的设计与校核
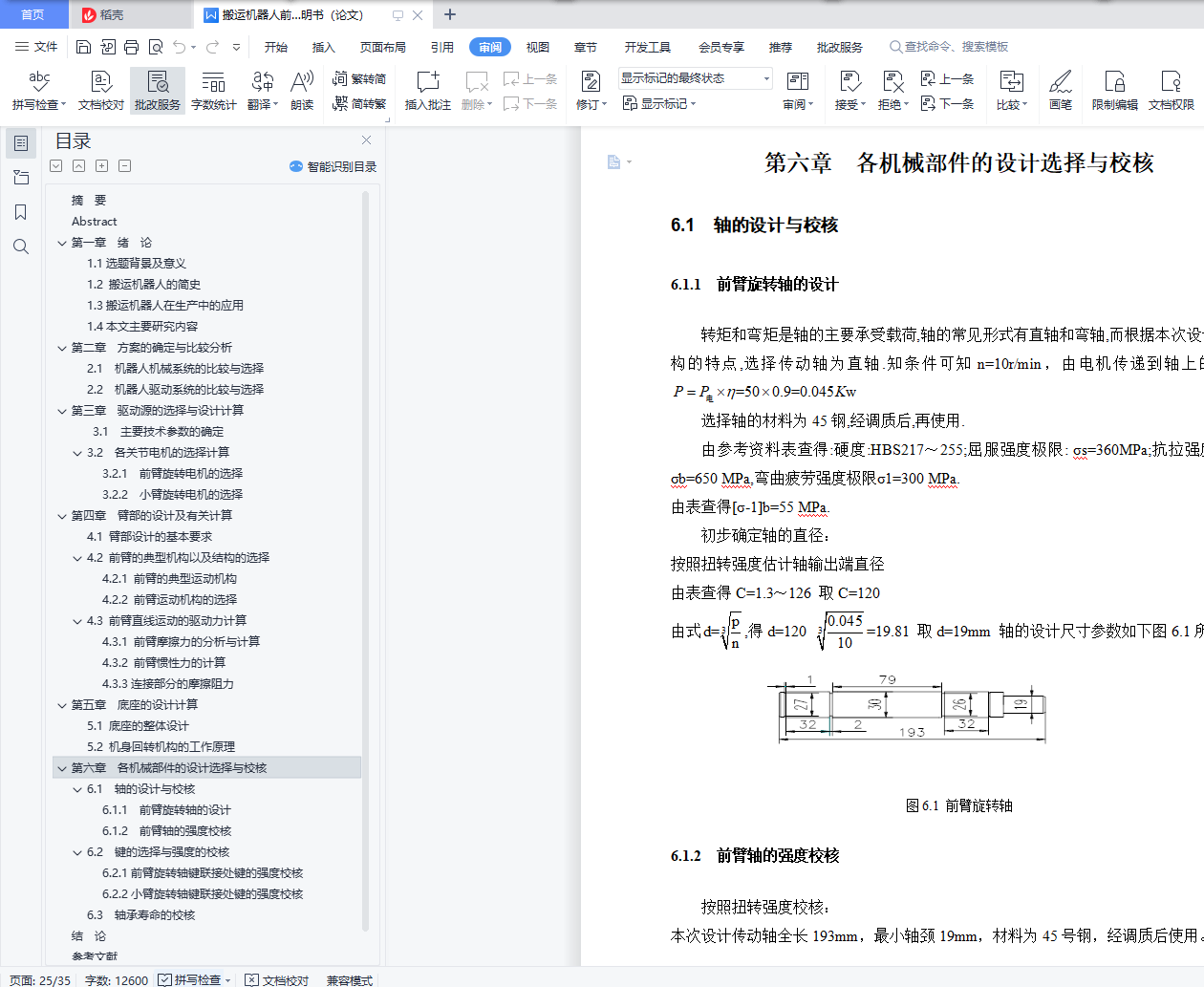
6.1.1 前臂旋转轴的设计
6.1.2 前臂轴的强度校核
6.2 键的选择与强度的校核
6.2.1前臂旋转轴键联接处键的强度校核
6.2.2小臂旋转轴键联接处键的强度校核
6.3 轴承寿命的校核
结 论
参考文献
致 谢