摘 要
大豆联合收割机对减轻人力劳动和提高大豆收获效率具有重要作用。在机械化收获大豆过程中,大豆联合收割机关键部件:割台,脱豆装置和清选装置等各环节对收获质量有着较大的影响,因此本文对大豆联合收割机关键技术进行了研究分析,对大豆联合收获机实际生产中出现的问题展开了讨论,并提出了解决办法。
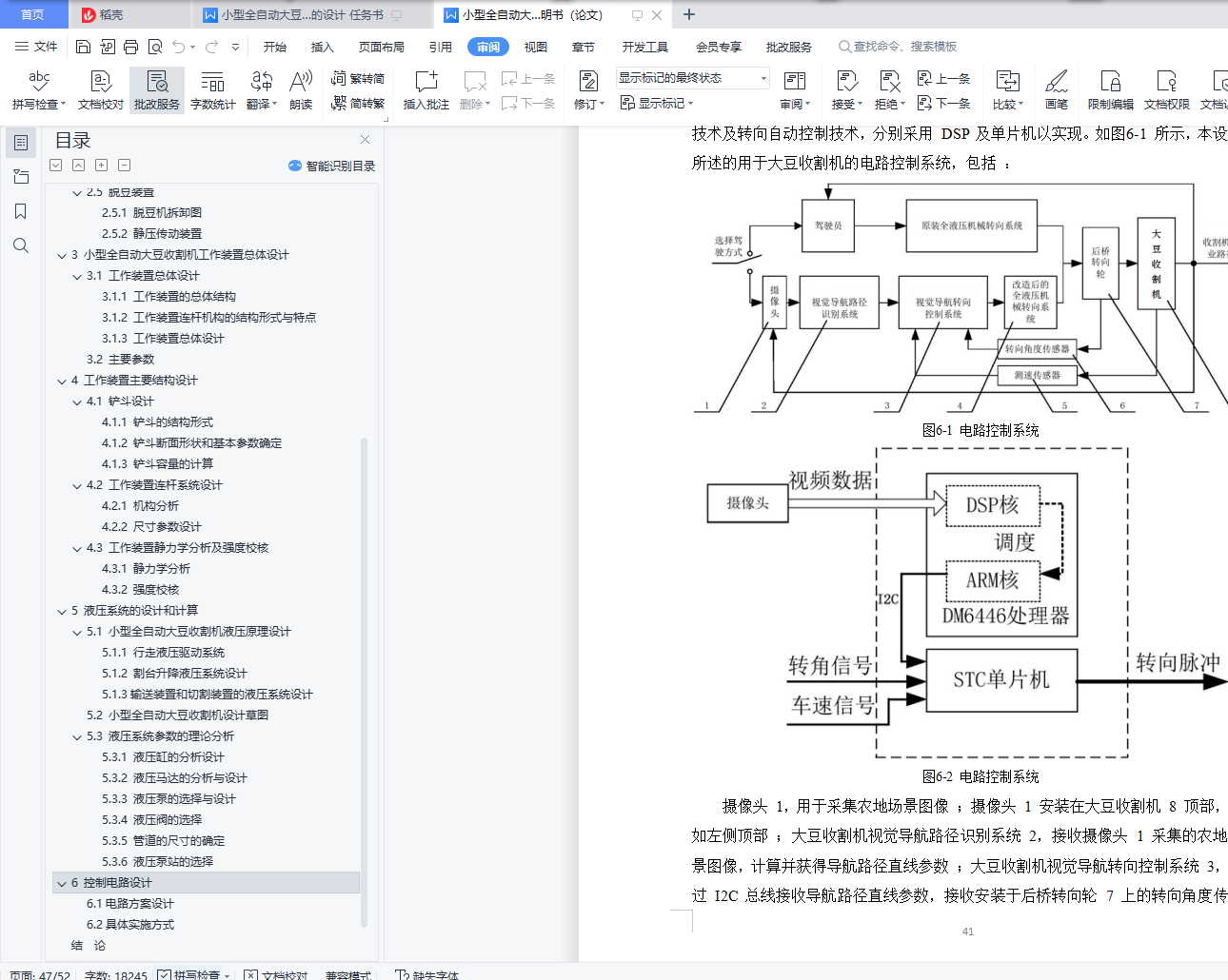
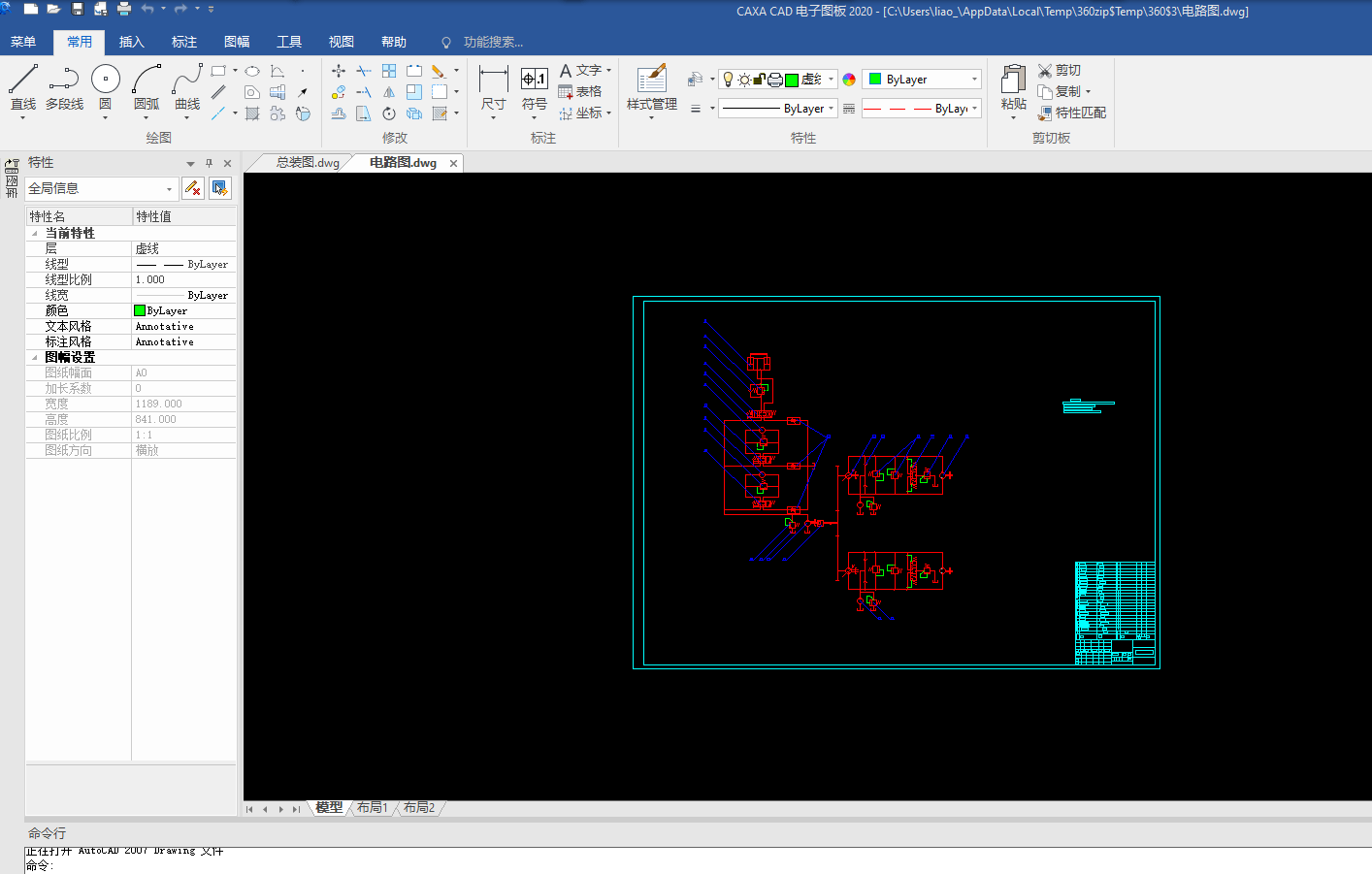
针对大豆联合收割机在收割作物时,由于地形地貌复杂和作物稀疏而造成的推进器行进困难以及滚筒阻塞问题,提出一种新的大豆联合收割机行进速度控制系统,大豆收割机视觉导航路径识别系统的核心为采用达芬奇平台的 DM6446 处理器,DM6446 处理器包含有 ARM 核和 DSP 核 ;通过 ARM 核启动大豆收割机视觉导航路径识别系统后,控制视频前端设备采集摄像头的视频数据,并调度DSP核进行图像处理,经过路径识别处理算法和路径规划决策系统处理后,最终获得导航路径直线参数,根据导航路径直线参数,DSP核把车身航向偏差数据交换到ARM核数据空间,并通过I2C总线传送至STC单片机。
本设计所述的用于大豆收割机的电路控制系统,采用DSP及单片机相结合,系统功耗低,设备小型化,安装方便,适合于推广使用。适用于大豆收割机视觉导航辅助驾驶用,装载系统后,驾驶员可以利用该系统进行收获作业时的辅助驾驶用,可以缓解驾驶疲劳,提高收获的效率及收获质量。
关键词:全自动;大豆收割机;工作装置;结构设计;控制系统
Abstract
Soybean combine harvester plays an important role in reducing human labor and improving the efficiency of soybean harvest.In the process of mechanized harvesting soybean, the key components of soybean combine: cutter, bean device and cleaning device each link has a great influence on harvest quality, so this paper analyzes the key technology of soybean combine, the actual production of soybean combine harvester problems are discussed, and put forward the solution.
For soybean combine harvesters when harvesting crops, Difficult propulsion movement and roller blockage due to complex terrain and sparse crops, A new traveling speed control system for soybean combine harvester, The core of the soybean harvester visual navigation path recognition system is the DM6446 processor using the Da Vinci platform, The DM6446 processor contains ARM cores and DSP cores; After starting the visual navigation path recognition system of the soybean harvester through the ARM kernel, Control that the video front-end device collects the video data of the camera, And dispatch the DSP kernel for image processing, After passing through the path recognition processing algorithm and the path planning decision system processing, Finally, to obtain the navigation path line parameters, According to the navigation path line parameters, The DSP core exchanges the body heading deviation data into the ARM core data space, And transmitted to STC MCU via I2C bus.
The circuit control system for soybean harvester described in this design adopts DSP and MCCM, with low power consumption, small equipment and convenient installation, which is suitable for popularization and use.It is suitable for visual navigation of soybean harvester. After loading the system, the driver can use the system for auxiliary driving during harvest operation, which can relieve driving fatigue and improve the harvest efficiency and harvest quality.
Key words: fully automatic; soybean harvester; working device; structural design; control system
目 录
摘 要 I
Abstract II
1 绪 论 1
1.1 选题背景及意义 1
1.2 国内外发展现状 1
1.2.1 国内的小型全自动大豆收割机发展状况 1
1.2.2 国外的小型全自动大豆收割机发展状况 1
1.3 研究主要内容 2
2 大豆收割机概述 3
2.1 大豆收割机简述 3
2.2 收割机的分类 3
2.3 构成部分及工作原理 3
2.3.1 收割台 3
2.3.2 拔禾轮 4
2.3.3 收割机绞龙 5
2.4 输谷清选装置 5
2.4.1 输谷装置 5
2.4.2 清选装置 6
2.5 脱豆装置 6
2.5.1 脱豆机拆卸图 6
2.5.2 静压传动装置 7
3 小型全自动大豆收割机工作装置总体设计 10
3.1 工作装置总体设计 10
3.1.1 工作装置的总体结构 10
3.1.2 工作装置连杆机构的结构形式与特点 10
3.1.3 工作装置总体设计 11
3.2 主要参数 11
4 工作装置主要结构设计 12
4.1 铲斗设计 12
4.1.1 铲斗的结构形式 12
4.1.2 铲斗断面形状和基本参数确定 14
4.1.3 铲斗容量的计算 17
4.2 工作装置连杆系统设计 18
4.2.1 机构分析 18
4.2.2 尺寸参数设计 19
4.3 工作装置静力学分析及强度校核 23
4.3.1 静力学分析 23
4.3.2 强度校核 27
5 液压系统的设计和计算 30
5.1 小型全自动大豆收割机液压原理设计 30
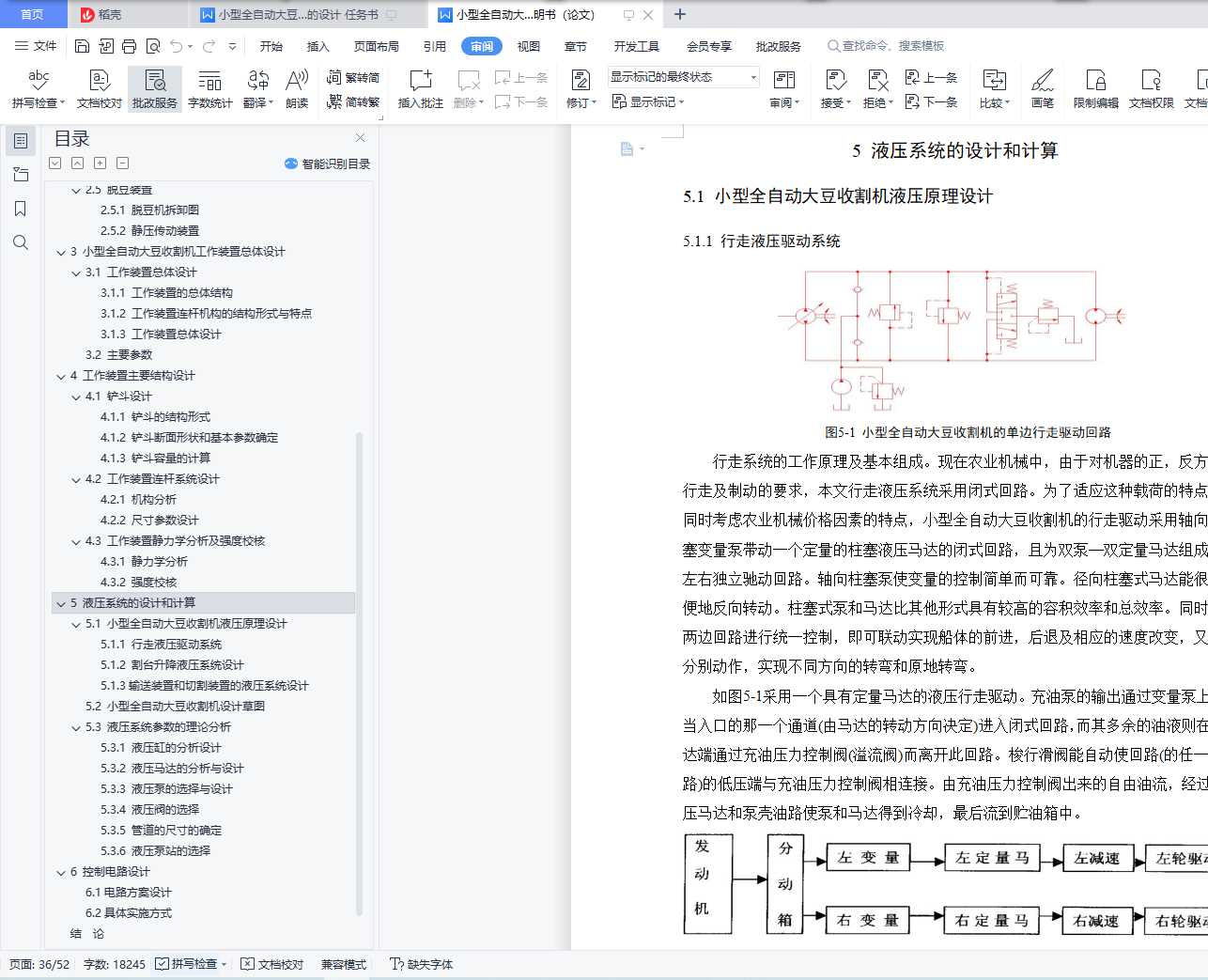
5.1.1 行走液压驱动系统 30
5.1.2 割台升降液压系统设计 31
5.1.3输送装置和切割装置的液压系统设计 32
5.2 小型全自动大豆收割机设计草图 32
5.3 液压系统参数的理论分析 33
5.3.1 液压缸的分析设计 33
5.3.2 液压马达的分析与设计 34
5.3.3 液压泵的选择与设计 36
5.3.4 液压阀的选择 37
5.3.5 管道的尺寸的确定 37
5.3.6 液压泵站的选择 38
6 控制电路设计 39
6.1电路方案设计 39
6.2具体实施方式 41
结 论 44
致 谢 45
参考文献 46