目录
一、 选题背景及课程简介 3
(一)选题背景 3
(二)课题简介 3
二、 方案比较与选择 6
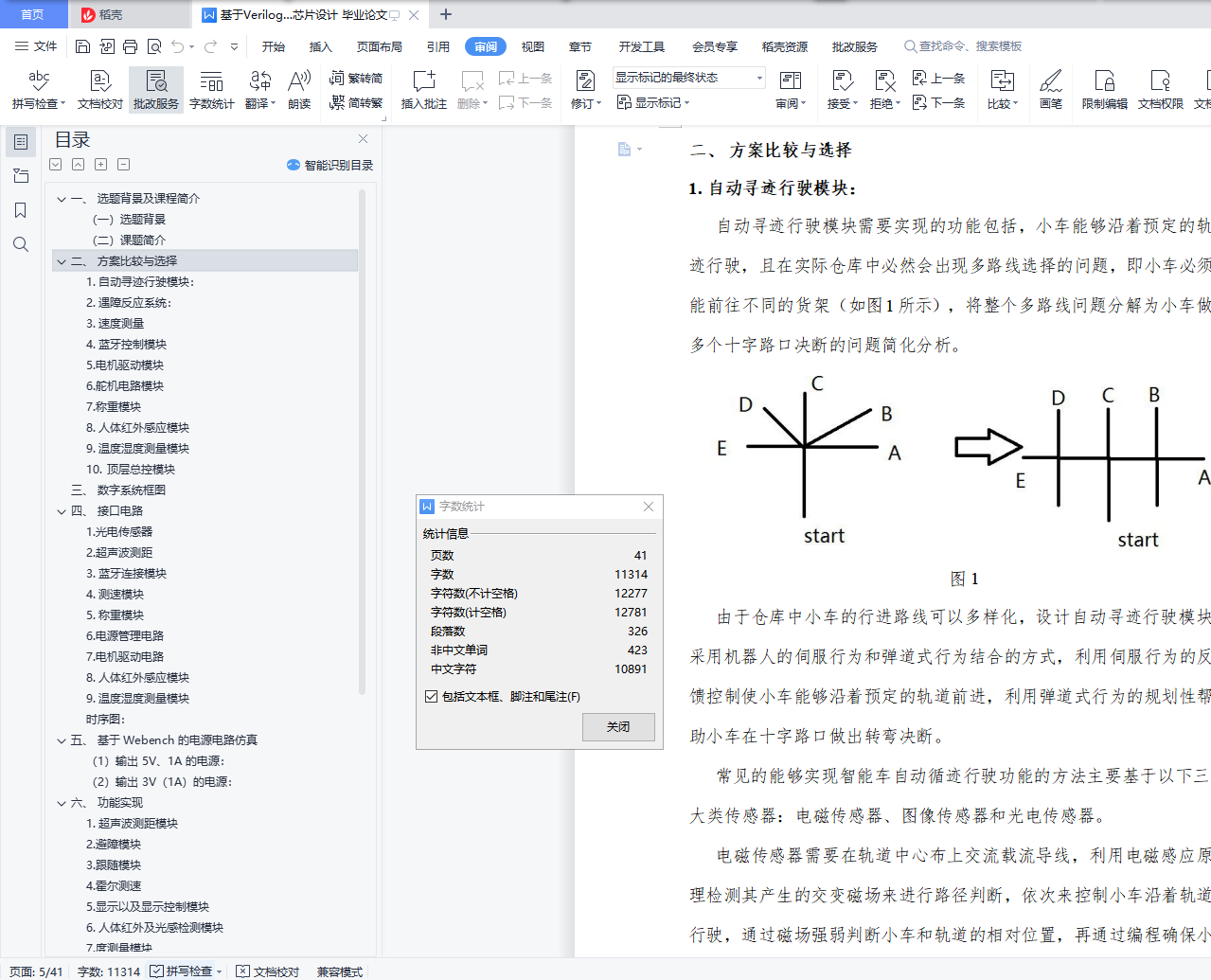
1. 自动寻迹行驶模块: 6
2. 遇障反应系统: 8
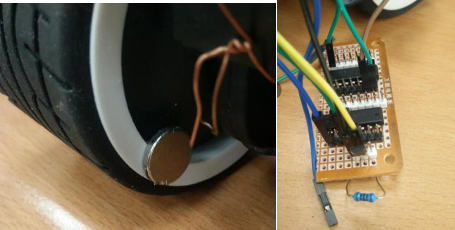
3. 速度测量 9
4. 蓝牙控制模块 10
5. 电机驱动模块 11
6. 舵机电路模块 10
7. 称重模块 10
8. 人体红外感应模块 10
9. 温度湿度测量模块 10
10. 顶层总控模块 10
三、 数字系统框图 11
四、 接口电路 12
1. 光电传感器 12
2. 超声波测距 13
3. 蓝牙连接模块 15
4. 测速模块 17
5. 称重模块 19
6. 电源管理电路 21
7. 电机驱动电路 22
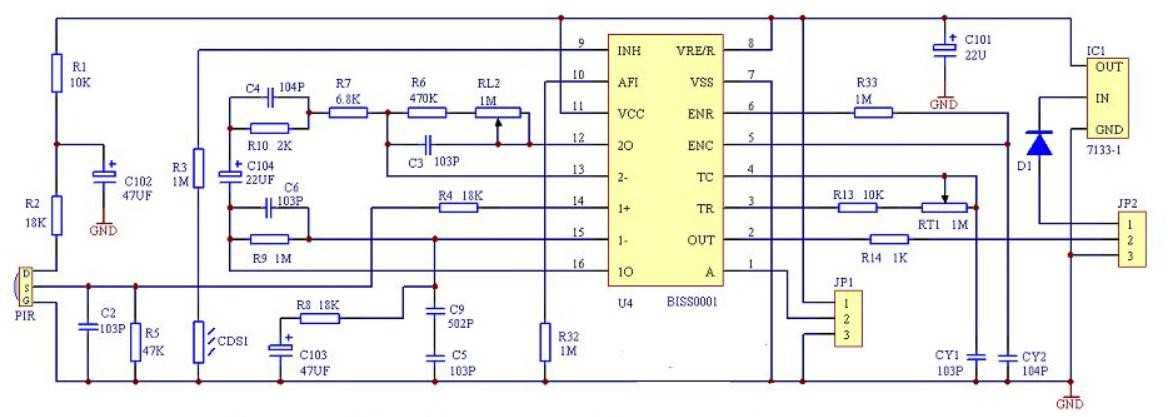
8. 人体红外感应模块 20
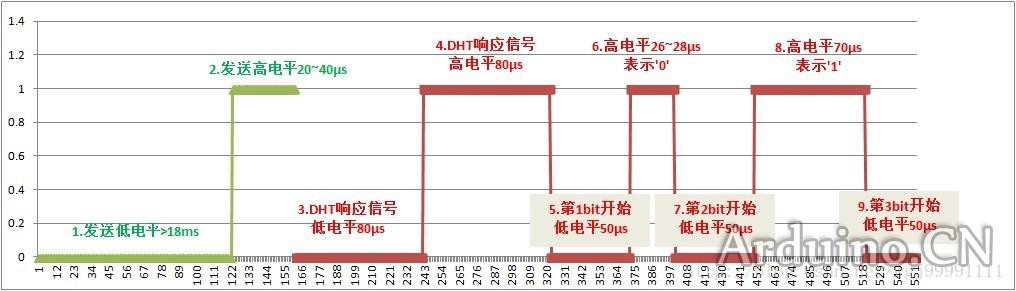
9. 温度湿度测量模块 21
时序图: 22
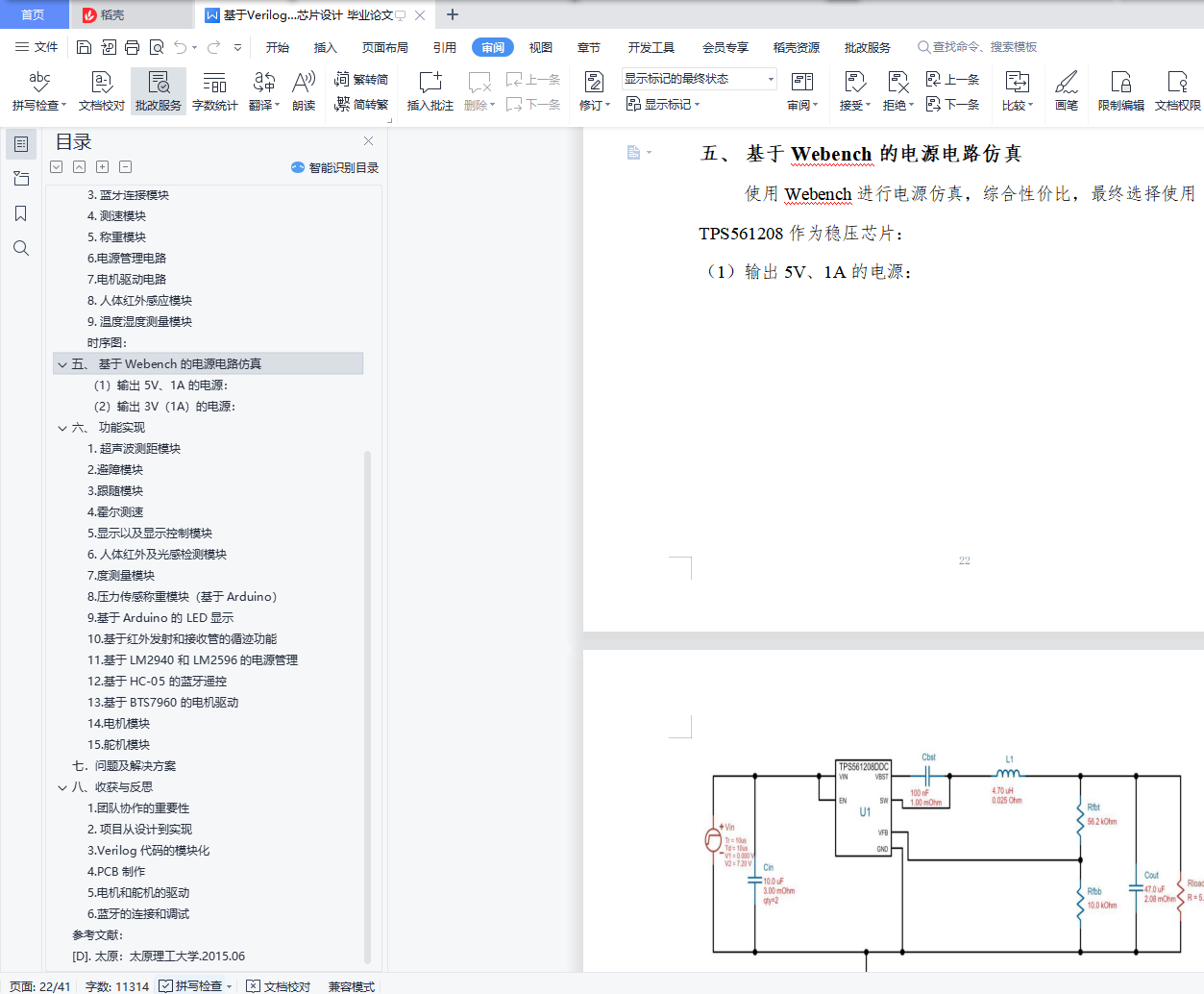
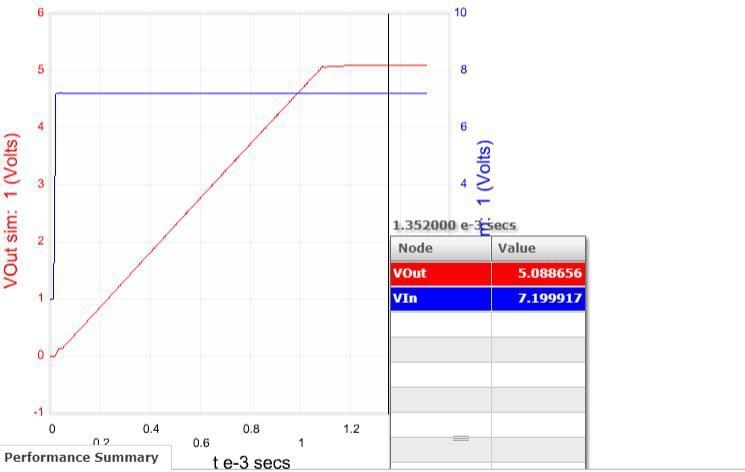
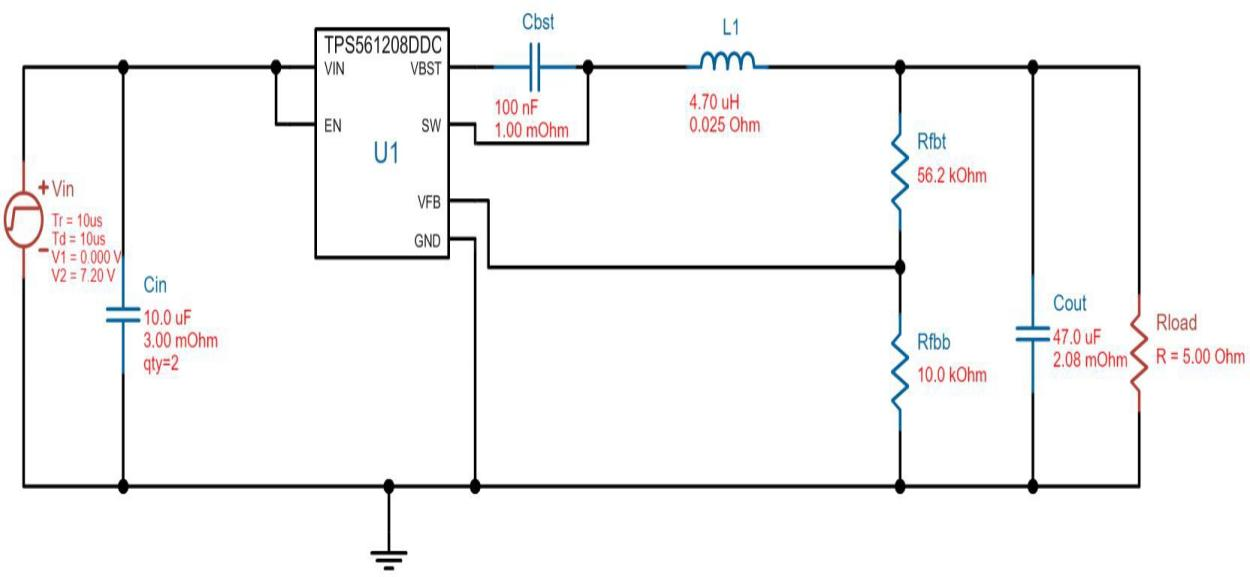
五、 基于 Webench 的电源电路仿真 22
(1)输出 5V、1A 的电源: 22
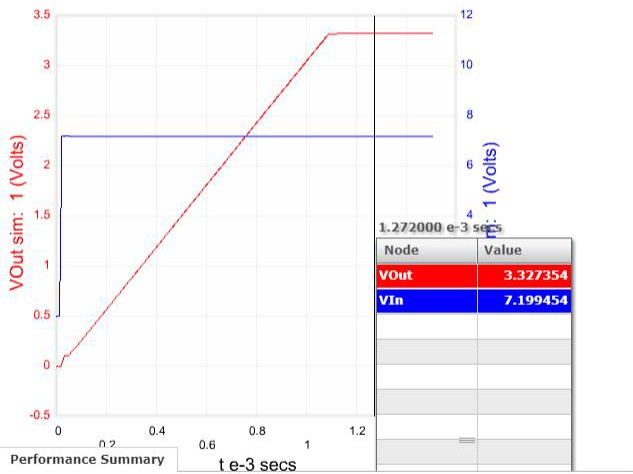
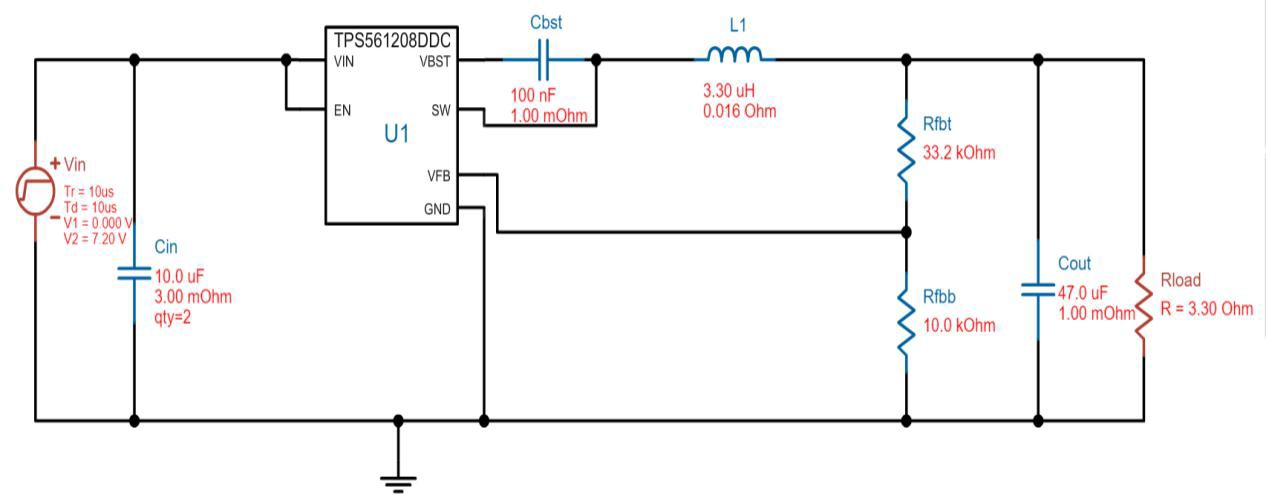
(2)输出 3V(1A)的电源: 23
六、 功能实现 24
1. 超声波测距模块 24
2. 避障模块 26
3. 跟随模块 27
4. 霍尔测速 27
5. 显示以及显示控制模块 28
6. 人体红外及光感检测模块 28
7. 度测量模块 29
8. 压力传感称重模块(基于 Arduino) 30
9. 基于 Arduino 的 LED 显示 31
10. 基于红外发射和接收管的循迹功能 32
11. 基于 LM2940 和 LM2596 的电源管理 32
12. 基于 HC-05 的蓝牙遥控 33
13. 基于 BTS7960 的电机驱动 33
14. 电机模块 34
15. 舵机模块 34
七.问题及解决方案 35
八、收获与反思 37
1.团队协作的重要性 37
2. 项目从设计到实现 38
3. Verilog 代码的模块化 38
4. PCB 制作 39
5. 电机和舵机的驱动 39
6. 蓝牙的连接和调试 40
参考文献: 41
[D]. 太原:太原理工大学.2015.06 41
一、 选题背景及课程简介
(一)选题背景
近年来,随着物流业的迅速发展,与之相匹配的智能仓库也越来越受各大物流企业以及电商的青睐,特别是以阿里和京东为代表的电商巨头,更是把智能仓库作为自己的核心竞争力之一。而仓库机器人则是智能仓库最重要的组成部分,近年来有大量的巨头企业和初创企业加入到了仓库机器人的研发当中。因此,在经过一番讨论和比较之后,我们选择“仓库机器人”这一题目,以智能仓库为应用场景,以移动机器人为载体,使用可编程器件 FPGA 作为移动机器人的控制系统,通过外接多路传感器获取信息,模型真实场景和情形,设计和实现仓库机器人的一些基本的功能。
(二)课题简介
在设计移动机器人的功能时,我们充分考虑实际场景和应用当中仓库机器人应该具有的基本功能和可能会遇到的情形及对应的解决方案,同时考虑成本以及可实现性,总结为以下几点:
(1)自动行驶:模拟仓库机器人在预定轨道自动行使,对应移动机器人能够按照预先搭建设计好的轨道自动行驶,并根据轨道调整前进方向。
(2)“十字路口”自动决策:模拟在行使过程当中,遇到轨道交叉点时,仓库机器人能够按照预先设定的路线做出正确的轨道转向。
(3)“防止追尾”功能:在后车遇到前车时停止前进,等待前车走出一段距离后,再继续行驶。
(4)避让障碍物:在无轨道处行驶时,如果前方出现障碍物,移动机器人能够自动避让,防止碰撞。
(5)跟随前进:仓库机器人能够跟随仓库管理员前进,运输货物。
(6)称重模块:该模块用于测量小车上搭载的货物的重量。
(7)蓝牙连接:管理员在手机端对仓库机器人的移动进行控制。
(8)人体红外感应模块:考虑到仓库机器人在仓库来回行走,这样对于参考机器人有一定的危险,因此加入人体红外感应模块,当有行人靠近小车时,小车能够给予回应,目前以蜂鸣器作为回应的载体。
(9)温度湿度测量模块:考虑到实际智能仓库对温度湿度要求严苛,本模块实现对仓库温度湿度的测量。
(10)数据测量:
A.距离测量:检测移动机器人与前方的障碍物或者前车的距离;
B.速度检测:检测移动机器人移动的速度,也能控制速度在不同的档位;
C.对(6)称重模块采集的数据进行分析计算,得出载物重量;
D.温度湿度测量:实现对仓库温度湿度的测量。
E.A\B\C\D 的检测到的数据,能够在 FPGA 数码管进行显示;。