本科毕业设计(论文)前期报告
毕业设计(论文)题目:电动轮椅变速控制系统的设计
所学专业: 机械设计制造及自动化
学生信息:
指导教师信息:
报告提交日期:
目录
本科毕业设计(论文)前期报告
毕业设计(论文)题目:电动轮椅变速控制系统的设计
所学专业: 机械设计制造及自动化
学生信息:
指导教师信息:
报告提交日期:
一. 研究的目的和意义:
二. 国内外研究的历史和现状:
其分解图片如下:
三. 主要研究内容,初步设想解决方法
3.1控制系统选择,继电器,可编程逻辑控制器,或者单片机。
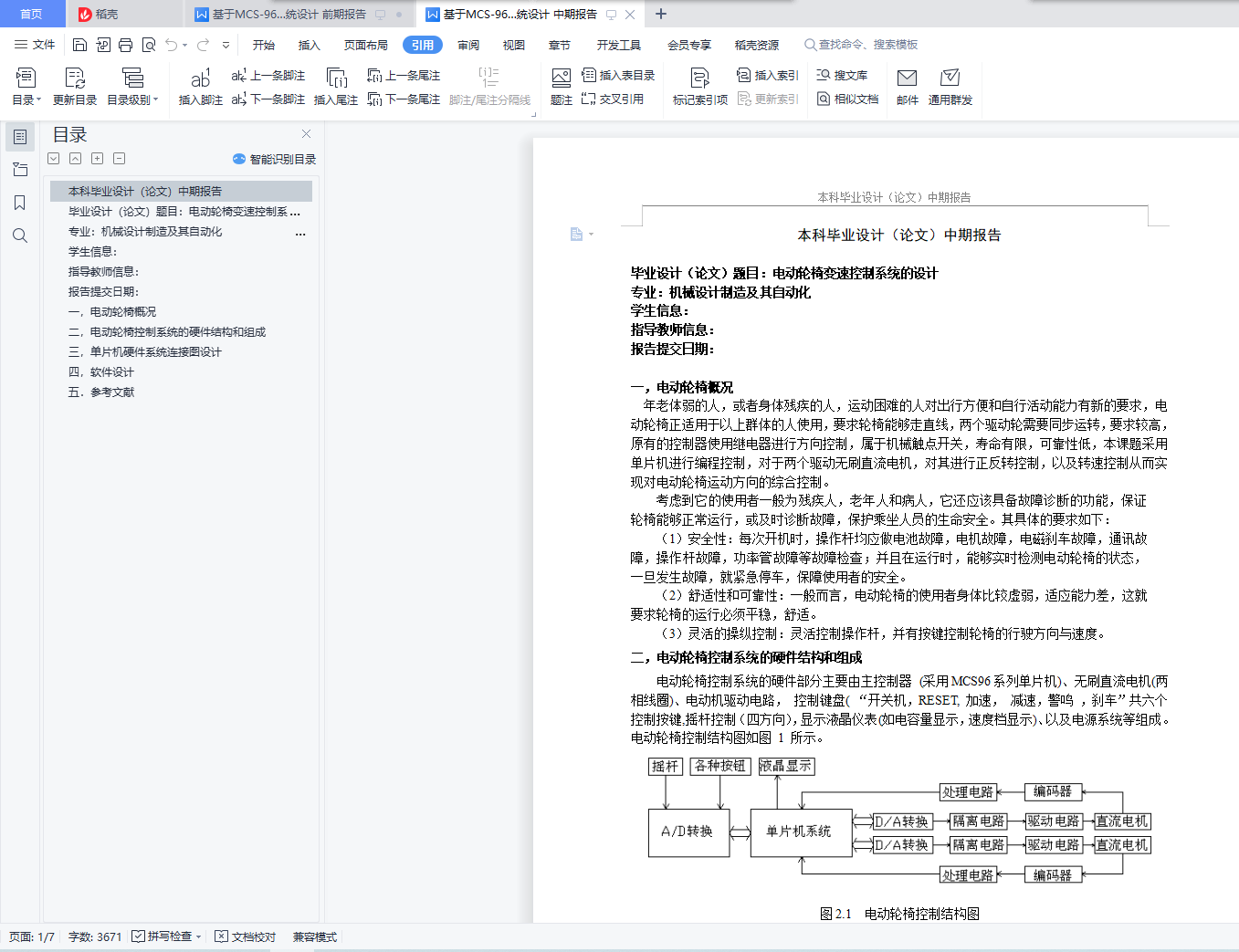
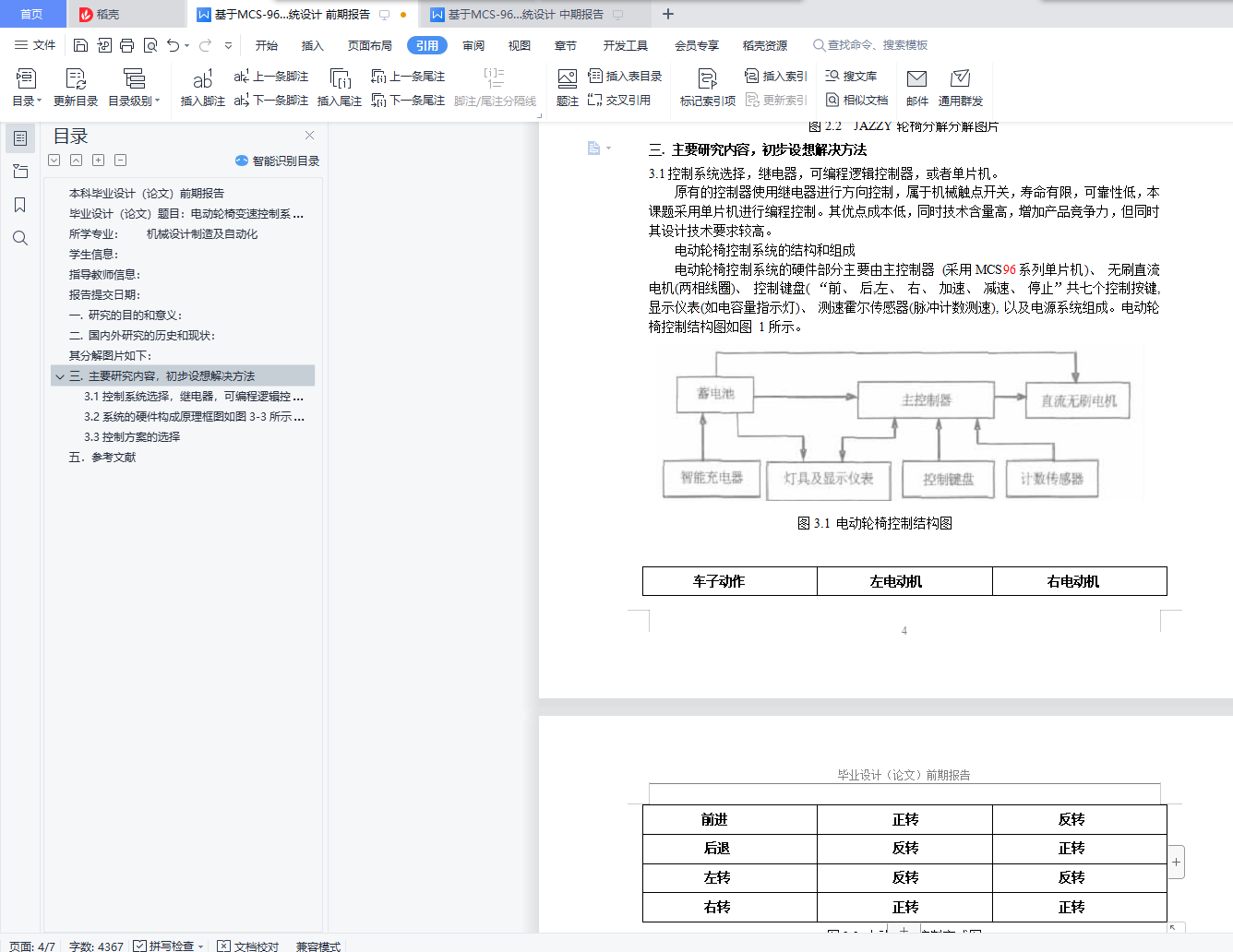
3.2系统的硬件构成原理框图如图3-3所示:
3.3控制方案的选择
五.参考文献
一. 研究的目的和意义:
近年来随着道路和步行道的平整化,或者室内地板的平整化,除残疾人外,对于随着人口老龄化,而步行正变得日益艰难的人们,以及在医院内行动的人们当中,轮椅的使用的越来越广泛。我国各类残疾人的总数已达数千万人,其中肢体伤残人数,综合型残疾人不在少数,另外,随着生活水平的提高和医疗条件的改善,我国老龄人口逐年增加,总数在亿人以上,社会对电动轮椅车的需求量是巨大的。
使用轮椅的人们使用手动来驱动轮椅有些困难,另外也不能保证时刻身边有陪护人员,随着现代控制技术的日渐发展和成熟,尤其是电机控制技术的成熟以及多样化,在这样的背景下,最近提出了通过蓄电池来驱动车轮轴的电动轮椅方案,电动轮椅是下肢残疾人及年老体弱者使用的代步工具。以蓄电池提供能源,直流电机驱动行驶,具有车速平稳、操作简便、无污染、噪音低的特点。但补充动力(充电)时间较长,一次充电行驶距离短,适宜户外短途使用。电动轮椅除了轮椅本体之外,还有驱动力的驱动装置,控制该驱动部的控制部,以及对控制部发出操作指令的驱动部,轮椅是残疾人的代步工具,由于传统的轮椅没有动力源,对老年残疾人或高度残疾人带来很大的代步障碍,为此研究与设计一种自带动力源的轮椅就成为当务之急。
二. 国内外研究的历史和现状:
随着我国经济的发展,人民生活水平的提高,人们对生活水平提高有了新的认识,年老体弱的人,或者身体残疾的人,运动困难的人对出行方便和自行活动能力有了新的要求,电动轮椅正适用于以上群体的人使用,要求轮椅能够走直线,两个驱动轮需要同步运转,要求较高,原有的控制器使用继电器进行方向控制,属于机械触点开关,寿命有限,可靠性低,本课题采用单片机进行编程控制,对于两个驱动无刷直流电机,对其进行正反转控制,以及转速控制从而实现对电动轮椅运动方向的综合控制。
国内目前尚不具备研制开发高性能电动轮椅控制器的能力。国内的生产企业的电动轮椅产品基本上都采用了价格昂贵的进口电动轮椅控制器,甚至部分企业的电动驱动总成也采用了外购方式,因此国内现有企业的产品成本居高不下,以至电动轮椅产品的市场售价长期以来居高不下,难以为普通用户接受,也直接影响了电动轮椅市场的发展。
而在国外,民用电动轮椅的发展历史则可追溯到二十世纪五十年代。第二次世界大
战后,社会对轮椅的需求量猛增。由于伤残者对回归社会和独立生活的渴望,促使轮椅的性能和质量不断完善和提高,电动轮椅技术的研究就是从此时起步的。那时电动轮椅主要适用于患者的手功能很弱、不能驱动普通轮椅时;或虽然能驱动普通轮椅,但行动距离远,体力不能负担时,或身体衰弱根本不宜驱动时。到了二十世纪七十年代中期,单片机的出现使得电动轮椅控制器的安全性和控制性能得到很大提高,电动轮椅的研究得到了飞速的发展。为此,美国国家标准制定委员会康复工程部和北美援助技术协会共同制定了基于电池测试、稳态测试、倾翻角测试、制动距离测试、能耗测试、障碍翻越能力测试和其他一些体现轮椅性能特征的电动轮椅标准。
到目前为止,国外已经开发出各种类型的电动轮椅。按驱动类型分,可分为双轮驱动型和多轮驱动型。总体来说,双轮驱动型轮椅体积较小,重量较轻;双轮驱动轮椅按驱动轮的位置分又可分为前轮驱动型,中轮驱动型和后轮驱动型。这三种类型的轮椅各有其优缺点:前轮驱动型轮椅能够在崎岖不平的地面上行驶,爬坡能力强,但它的速度较慢且方向不易控制;后轮驱动型轮椅运行平稳,行驶速度快,但回转半径最大,不适合在室内使用;中轮驱动型轮椅回转半径小,能够在狭窄的空间内运行,但在行驶过程中前后的从动轮容易被卡住。在多轮驱动的轮椅中,四轮驱动的结构应用的比较广泛,这种轮椅能够在各种路面上行驶,但它体积较大,非常笨重,不适合室内使用。电动轮椅及其控制技术经过几十年的发展,对轮椅结构和控制策略的研究已经比较成熟。现在,世界上大多数轮椅生产商开发的轮椅大多是双轮驱动型,其中又以中轮驱动型为主。今后轮椅控制技术的研究方向已向智能化,网络化方向发展。
美国、英国、德国、日本、澳大利亚等多个国家以及我国的台湾省都在进行这方面的研究。智能轮椅技术是将机器人技术应用于电动轮椅,融合多种领域的研究,包括机器人视觉、机器人导航和定位、模式识别、多传感器融合及用户接口等,目的是使电动轮椅脱离人手的控制,实现安全的自动导航。如下图中所示的JAZZY品牌电动轮椅,其视图如下,由此也可以清楚的看清其机构,组成部分。
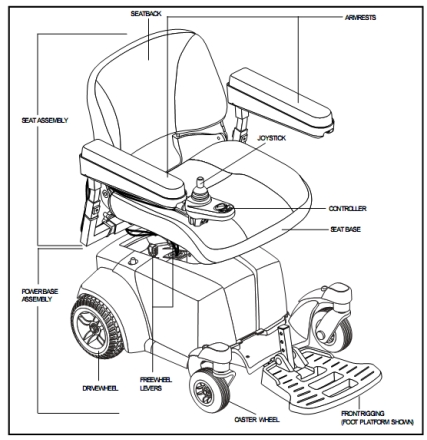
图2.1 JAZZY品牌电动轮椅