目 录
目 录 I
摘 要 IV
Abstract V
第一章 前言 1
1.1 研究的目的及意义 1
1.2 机械手在国内外现状和发展趋势 1
1.3 主要研究的内容 2
1.4 解决的关键问题 3
第二章 执行系统的分析与选择 4
2.1 执行机构坐标形式的选择 4
2.2 执行机构的组成 6
2.3 执行机构各部分的分析与选择 6
2.3.1 手部的选择 6
2.3.2 手臂结构的选择 8
2.3.3 机座结构的选择 9
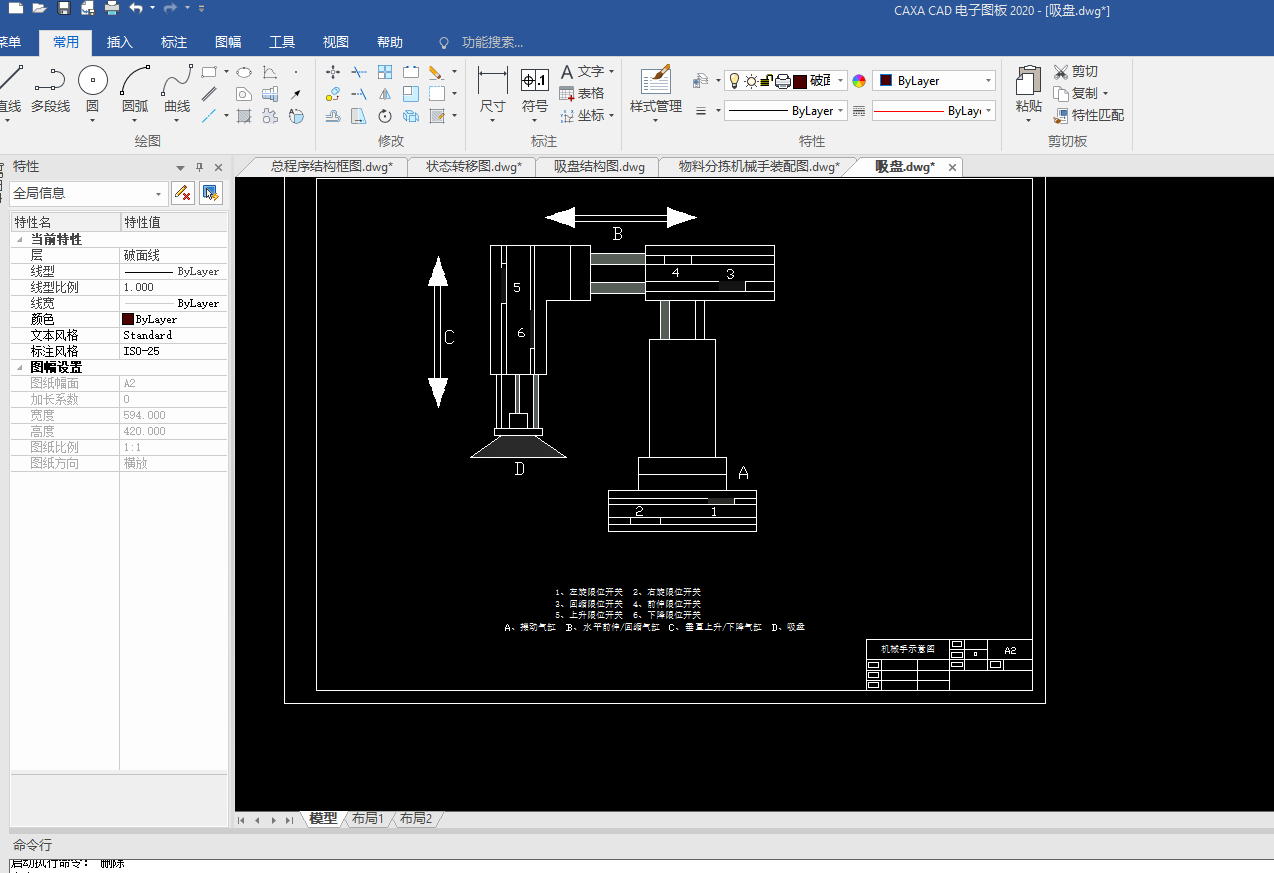
2.4 执行机构的工作原理 10
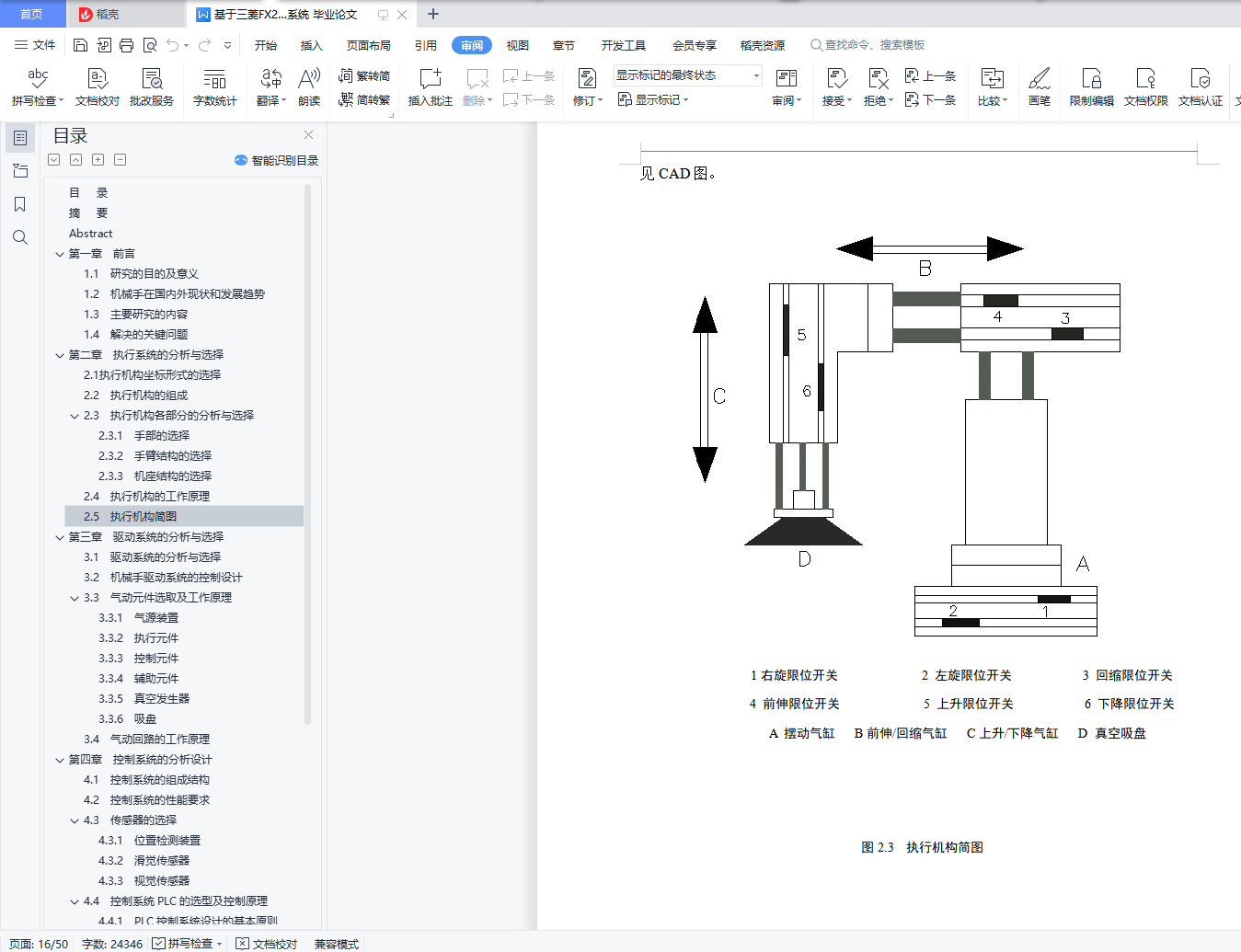
2.5 执行机构简图 10
第三章 驱动系统的分析与选择 12
3.1 驱动系统的分析与选择 12
3.2 机械手驱动系统的控制设计 13
3.3 气动元件选取及工作原理 14
3.3.1 气源装置 14
3.3.2 执行元件 15
3.3.3 控制元件 16
3.3.4 辅助元件 17
3.3.5 真空发生器 18
3.3.6 吸盘 18
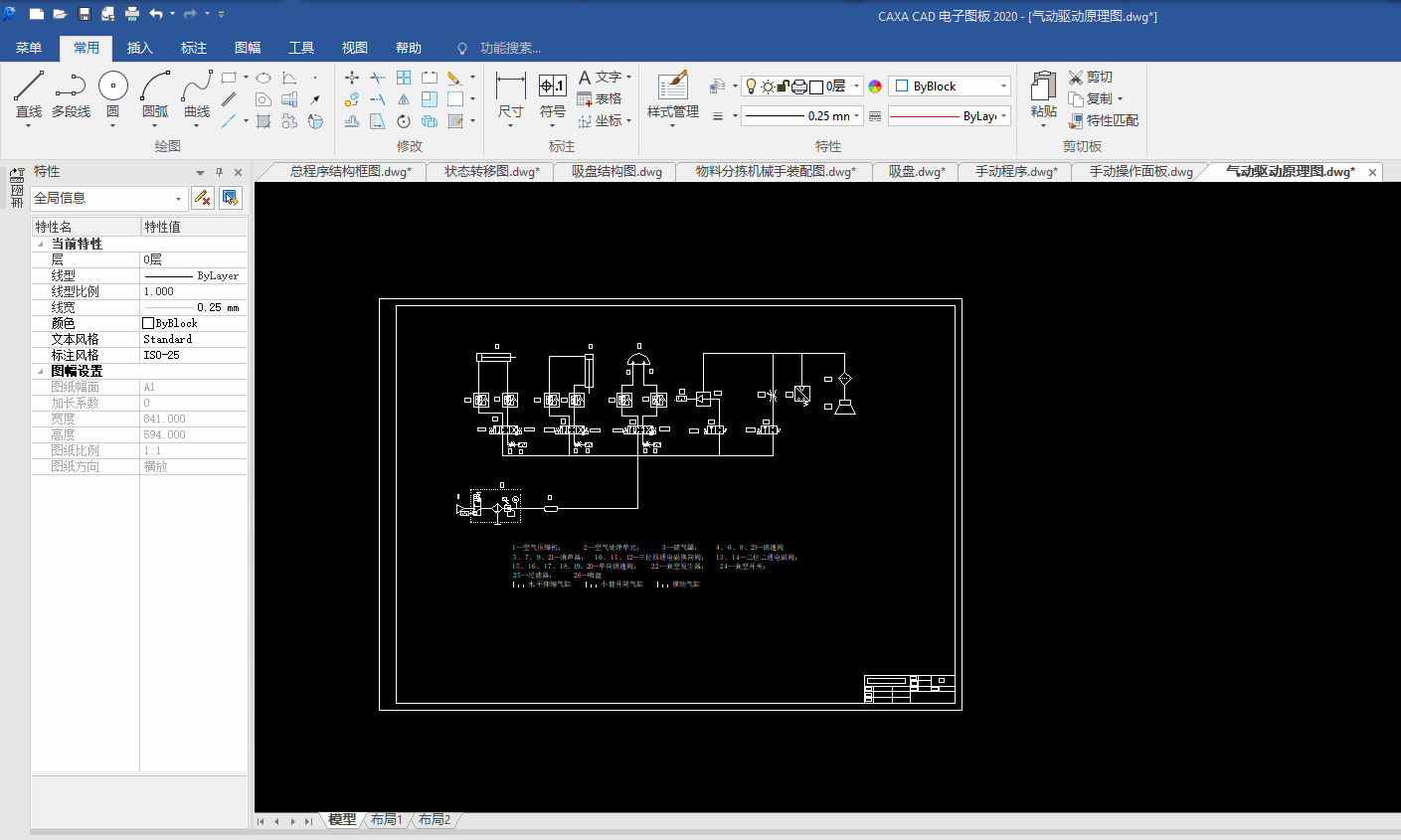
3.4 气动回路的工作原理 18
第四章 控制系统的分析设计 22
4.1 控制系统的组成结构 22
4.2 控制系统的性能要求 22
4.3 传感器的选择 23
4.3.1 位置检测装置 23
4.3.2 滑觉传感器 23
4.3.3 视觉传感器 24
4.4 控制系统PLC的选型及控制原理 25
4.4.1 PLC控制系统设计的基本原则 25
4.4.2 PLC种类及型号选择 30
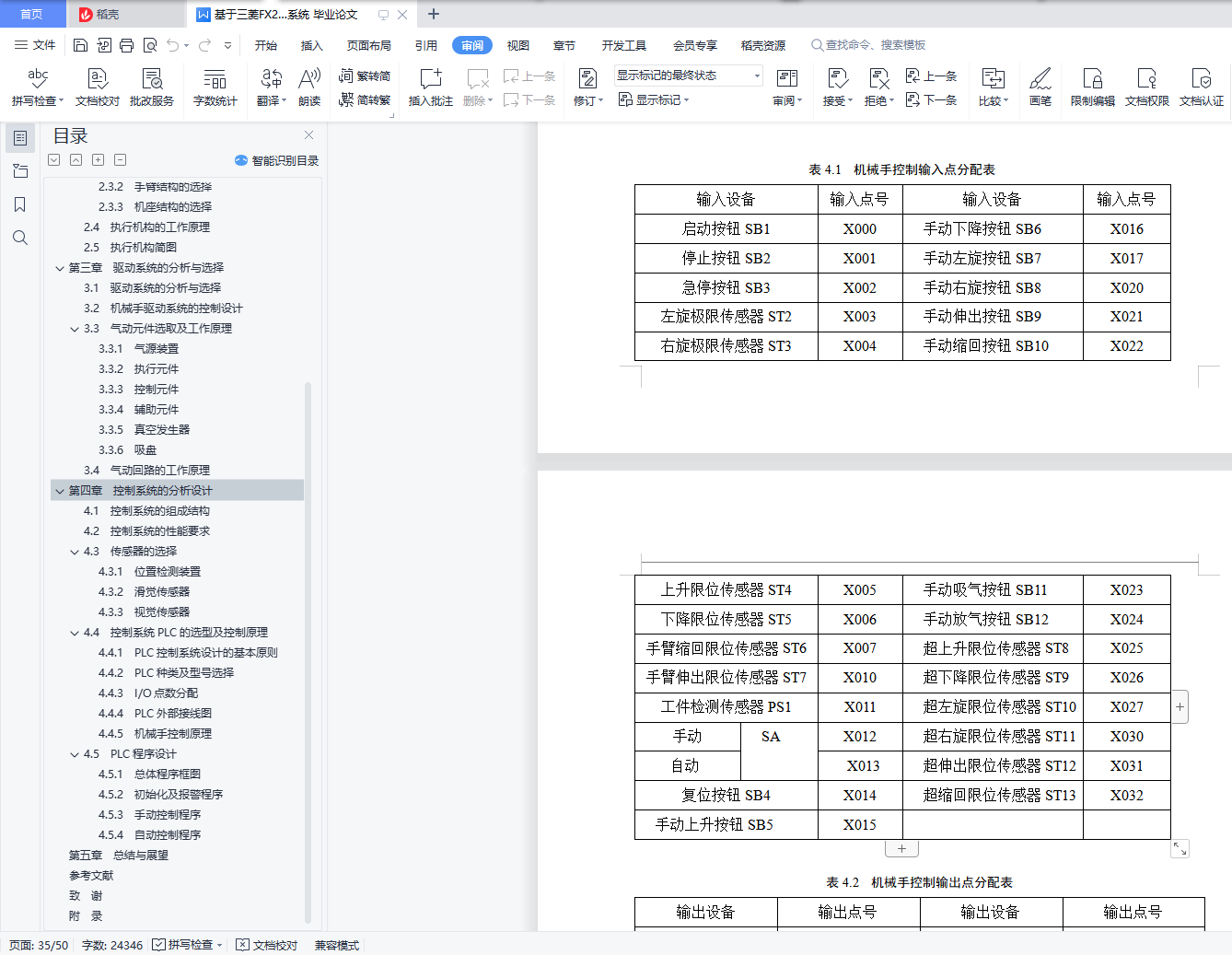
4.4.3 I/O点数分配 30
4.4.4 PLC外部接线图 32
4.4.5 机械手控制原理 32
4.5 PLC程序设计 34
4.5.1 总体程序框图 34
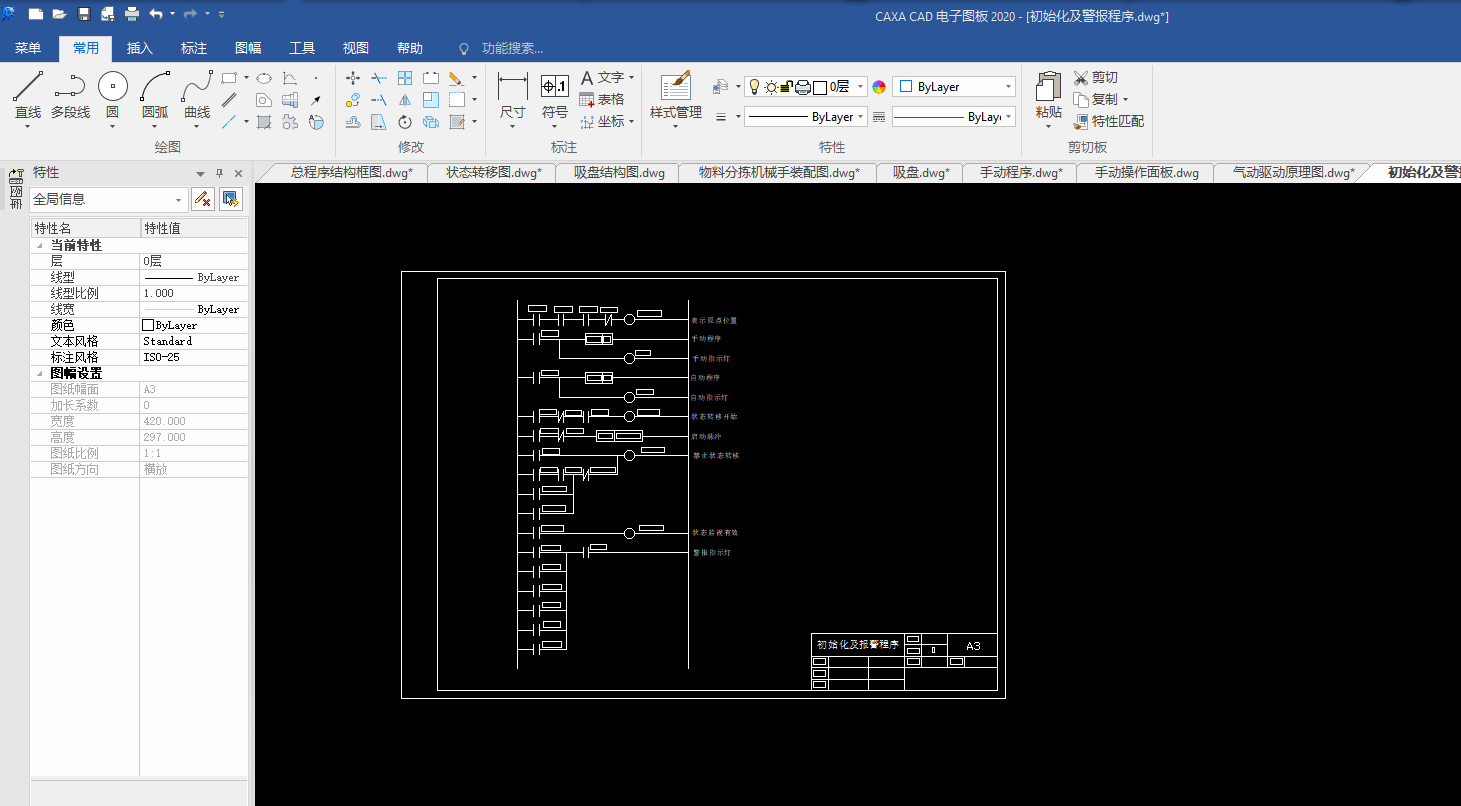
4.5.2 初始化及报警程序 36
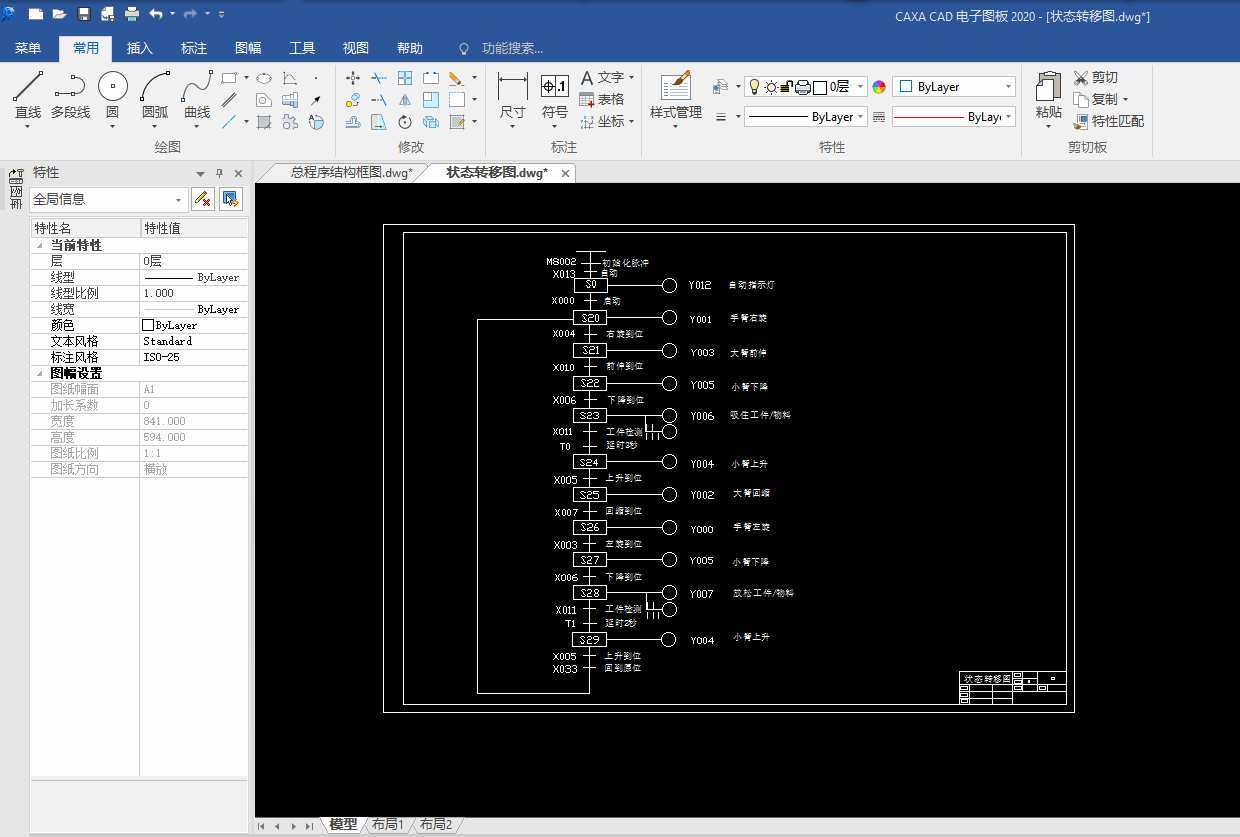
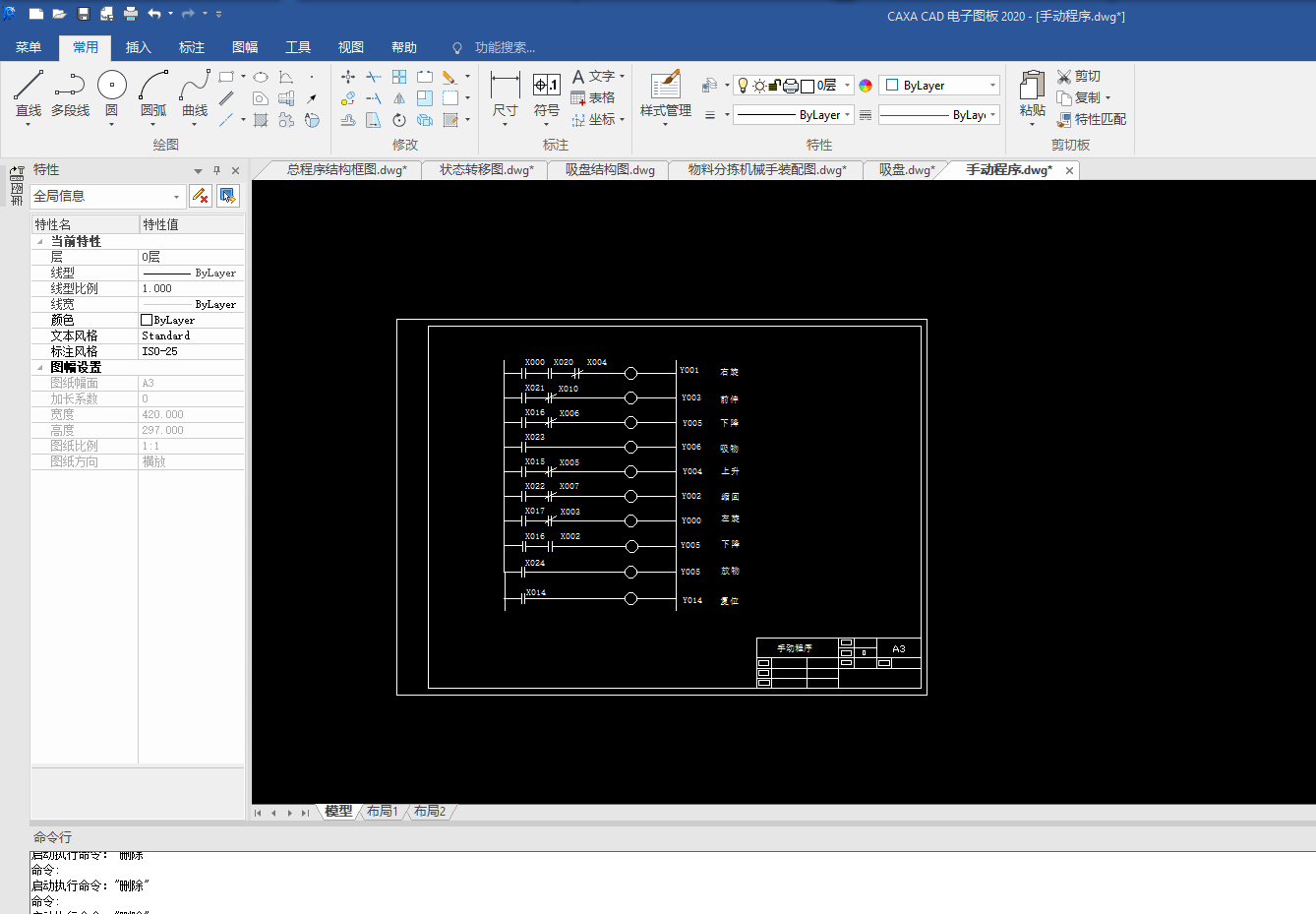
4.5.3 手动控制程序 37
4.5.4 自动控制程序 39
第五章 总结与展望 42
参考文献 43
致 谢 44
附 录 45
摘 要
机械手在先进制造领域中扮演着极其重要的角色。它可以搬运货物、分拣物品、代替人的繁重劳动。可以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因此被广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
本文在纵观了近年来机械手发展状况的基础上,结合机械手方面的设计,对机械手技术进行了系统的分析,提出了用气动驱动和PLC控制的设计方案。采用整体化的设计思想,充分考虑了软、硬件各自的特点并进行互补优化。对物料分拣机械手的整体结构、执行结构、驱动系统和控制系统进行了分析和设计。在其驱动系统中采用气动驱动,控制系统中选择PLC的控制单元来完成系统功能的初始化、机械手的移动、故障报警等功能。最后提出了一种简单、易于实现、理论意义明确的控制策略。
通过以上部分的工作,得出了经济型、实用型、高可靠型物料分拣机械手的设计方案,对其他经济型PLC控制系统的设计也有一定的借鉴价值。
关键词: 机械手,气动控制,可编程控制器(PLC),自动化控制,物料分拣。
Abstract
Manipulator plays an extremely important role in the field of advanced manufacturing. It can carry goods, sort materials and do heavy works instead of the human being. It also can realize mechanization and automation of the production, do the jobs in harmful environment to protect the personal safety. So it is widely used in metallurgy, machinery manufacturing, electronics, light industry and atomic energy etc.
In this paper,by reviewing the developmental status of the manipulator in recent years, combining the design of manipulator and systematic analyzing technology of the manipulator, We proposed the design scheme that the manipulator was driven by the pneumatic and the system was controlled by PLC. Integrative idea was adopted in this design to fully consider the characteristics of the software and hardware and complementary optimization. We analyzed and designed the overall structure, the implementation of structural, driving system and control system of the manipulator. We used pneumatic-driven in the driving system, PLC control unit in the control system to complete initialization of the system, manipulator's moving, failure alarm and so on. Finally we put forward a control strategy which is simple, easy to realize, and clear theoretical significance.
Through the work above, a practical, economical, high-reliability sorting material manipulator was designed, which also had certain reference value for the other types of economical PLC control system design.
Key words: manipulator ;pneumatic-driven; programmable logic controller (PLC); automatic control;sorting materials