目录
一、研究目标 3
(一)课题研究目的: 3
(二)课题研究目标: 3
二、研究开发方案 3
三、关键技术 4
四、研究开发计划 4
(一)随机栅格地图的建立 4
(二)学习复现A*算法 5
(三)将建立栅格地图和A*算法结合起来 6
(四)学习如何用MATLAB制作动图 7
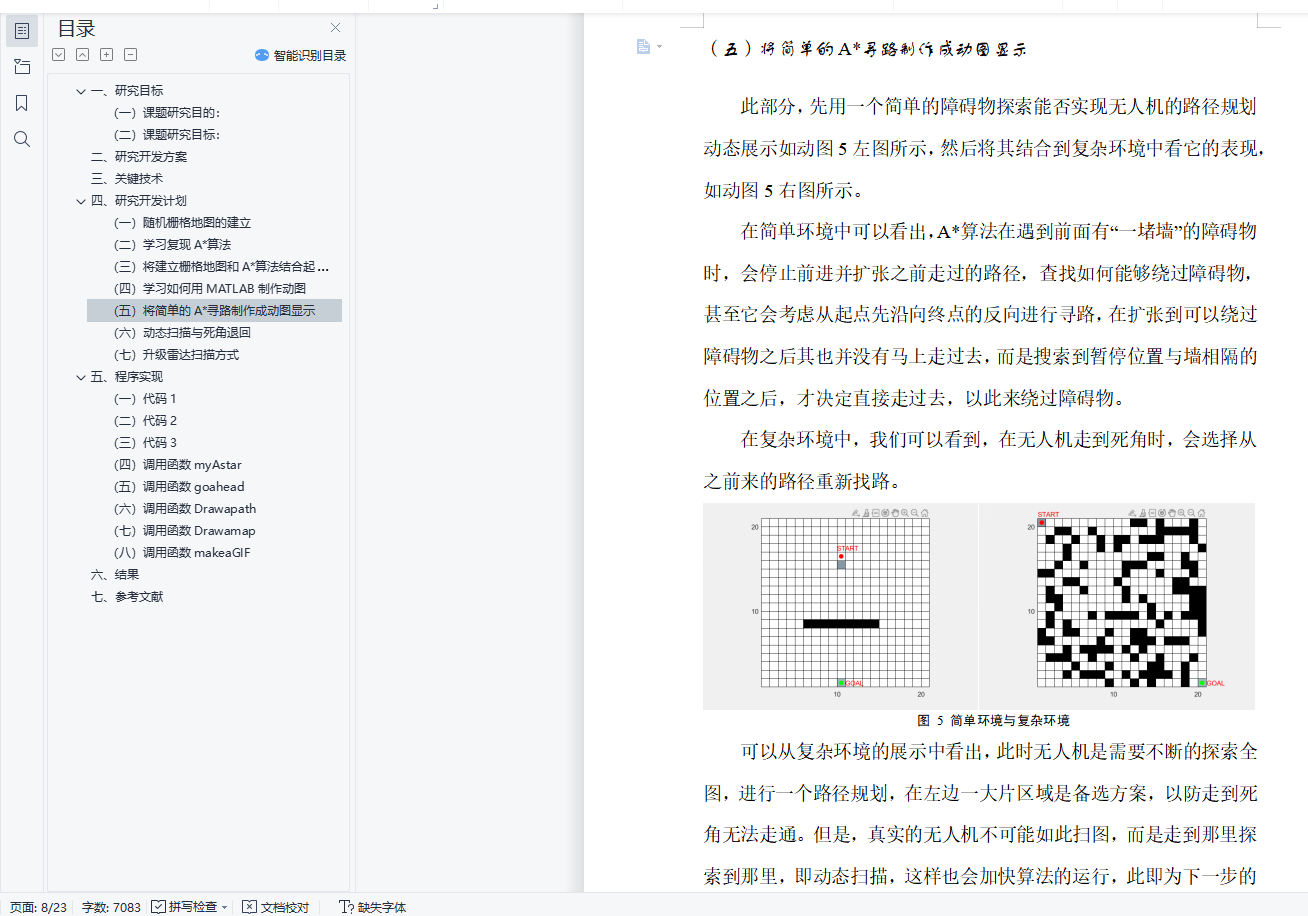
(五)将简单的A*寻路制作成动图显示 8
(六)动态扫描与死角退回 9
(七)升级雷达扫描方式 10
五、程序实现 12
(一)代码1 12
(二)代码2 14
(三)代码3 17
(四)调用函数myAstar 18
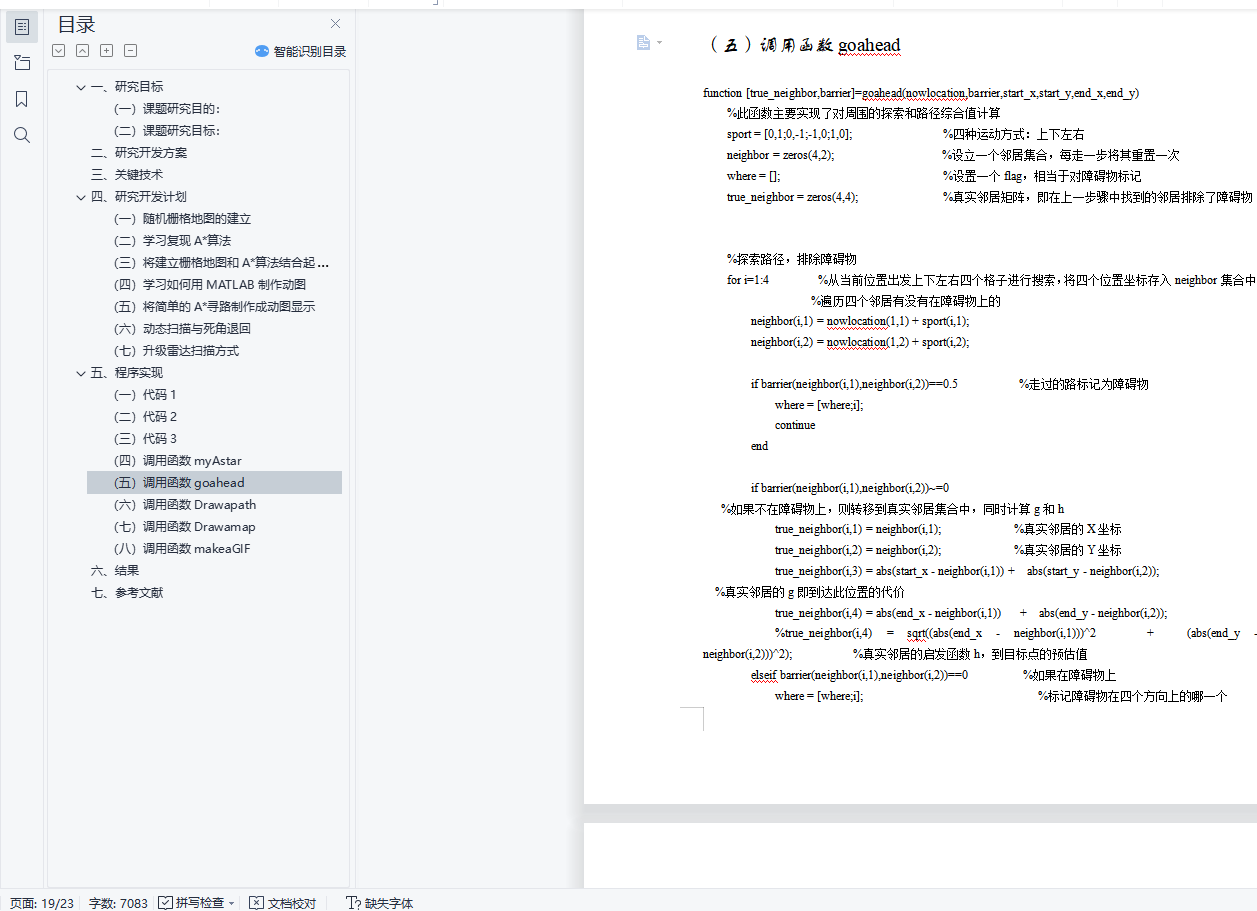
(五)调用函数goahead 19
(六)调用函数Drawapath 20
(七)调用函数Drawamap 20
(八)调用函数makeaGIF 21
六、结果 22
七、参考文献 23
一、研究目标
(一)课题研究目的:
无人机路径规划,无人机由起点出发向终点飞行,事先不知道环境地图的分布;假设无人机装备了激光雷达,能够探测一定范围的障碍物信息;利用A*算法规划当前认为可行的路径,不断探测障碍物,并不断规划路径使无人机最终到达目标点。
(二)课题研究目标:
①实现最基本的地图加载、显示;
②实现路径规划与显示,在前面程序的基础上,实现A * 算法,在这个阶段可以假设环境地图都已知,规划全局的地图并显示;
③实现激光雷达的扫描,在上述程序基础上,模拟激光雷达扫描。模拟从当前位置发射多条射线,判断障碍物是否在射线上并将结果进行显示;
④动态路径规划,在上述的成果基础上,设计动态路径规划的算法并实现。