摘 要
焊接机器人是一种自动化的焊接设备。采用机器人代替手工焊接作业是焊接制造业的发展趋势,是提高焊接质量、降低成本、改善工作环境的重要手段。机器人焊接作为现代制造技术发展的重要标志已被国内很多企业所接受,并且越来越多的企业首选焊接机器人作为技术改造的方案。焊接机器人的提出给芯片焊接研究带来了新的活力。
以芯片自动焊接机器人为研究对象。对机器人机械系统进行了结构设计的基础研究、运动仿真与受力分析,深入研究了工业机器人工作原理。
本文共由五章组成,各章的主要内容如下:第一章阐述了焊接机器人的应用现状和发展趋势,重点介绍了焊接机器人系统的组成。第二章分析了芯片焊接工艺方案,对各种坐标形式的机器人进行了比较,采取了以直角坐标的形式设计机器人,确定了机器人总体的传动方案。第三章中以X轴与Y轴方向传动装置的设计为重点,采用计算查表等方法对电机、滚珠丝杠进行了选择与校核计算,又对联轴器与导轨进行了选择并且确定了滚珠丝杠的支承方式。在自动焊接机器人的结构设计中,对X-Y工作台基座结构及Z轴方向的升降机构装置进行了设计。第四章运用Pro/Engineer软件,对X-Y工作台、回转式工作台及末端执行结构建立了三维模型。对各个部件进行了装配,检测了是否存在干涉现象。然后导出了二维CAD工程图纸;在Pro/E机构运动仿真模块中,实现了焊接机器人在X、Y、Z轴及Z轴旋转方向的运动仿真,考察了机器人各组件的运动情况,得到了各种有效的仿真数据结果,进一步说明了对机器人运动学分析研究系列结论的正确性;运用ANSYS软件对焊接机器人关键部件进行了受力分析,主要包括手臂的静力学分析和优化设计,以及对滚珠丝杠进行了瞬时动态力学分析。 第五章对全文工作进行了总结,对下一步的研究工作进行了展望。
关键词:芯片焊接;焊接机器人;三维建模;传动方案
Abstract
As a automated welding equipment, welding robot will instead of hand-welding operation. This is the trend of the manufacturing sector. It is to improve the welding quality, reduce capital, importantly, to improve the working environment. As an important symbol of the development of modern manufacturing technology, Robot welding has been accepted by more and more enterprises of China. More and more factories have selected welding robot as the transformation programs. Welding robot has brought new vitality to chip welding research.
Basic research, simulation and force analysis on the structural design of mechanical system of automatic chip welding robot are discussed, and further studied the theory of industrial robots.
This thesis includes five chapters, and the contents are as follows. The first chapter elaborates the present situation and developing trend of welding robot. The compositions of welding robot system are introduced with an emphasis.
The second chapter analyses of chips welding technology scheme. With the various forms of coordinates for robot compared, Cartesian coordinates are taken in the form of the design robot. And then, the overall transmission scheme of the robot is confirmed.
In chapter 3, X axis and Y axis direction in the design of the transmission devices as an emphasis. With the method of calculated by using look-up table, motors and ball screw are chosen and checked computation. After the coupling and guide rail are chosen, the supporting mode of the ball screw is determined. In the structure design of automatic welding robot, the base structure of the X-Y workbench and the lifting mechanism devices in the Z axis direction are designed.
In chapter 4, the three-dimensional models of X-Y workbench, rotary worktable and end implementation are established by the Pro/E software. With the assembly of every part, it is tested whether there is interference phenomenon. And then export the two-dimensional CAD engineering drawings. Then the Kinematic simulation for the welding robot in the X, Y, Z axis and Z axis rotation direction is simulated with motion simulation module of the Pro/E software. Based on the simulation, I observe the motion of the different parts of the robot and obtain all kinds of data I need, further approve the accuracy of series conclusions for analysis and research of robot kinematics. And then, the stress station of the key components of the welding robot is analyzed by the ANSYS software, including static analysis and optimal design for the arm, and the transient dynamic mechanical analysis for the ball screw.
The last chapter generalizes the whole thesis and foresights the next step of the research.
Key words:Chip welding; welding robot; build three-dimensional model; transmission scheme
目 录
摘 要
Abstract
第1章 绪论 1
1.1 课题研究的背景及意义 1
1.2 国内外焊接机器人的研究现状和发展趋势 1
1.2.1 国内外焊接机器人研究现状 1
1.2.2 国内外工业机器人研究趋势 3
1.2.3 焊接机器人技术存在的主要问题 5
1.2.4 芯片焊接机器人研究的意义 5
1.3 焊接机器人焊接系统简介 6
1.4 研究内容 6
第2章 机器人机械系统总体方案设计 8
2.1 芯片焊接工艺方案分析 8
2.2 机器人模型创建坐标形式的确定 11
2.2.1 机器人坐标形式比较 11
2.2.2 机器人设计方案与论证 12
2.3 机器人总体方案设计 13
2.3.1 传动系统方案设计 13
2.3.2 机器人工作原理介绍 14
第3章 自动焊接机器人结构设计 16
3.1 X轴与Y轴方向传动装置设计 16
3.1.1 电机的选择 16
3.1.2 滚珠丝杠的选择与校核 24
3.1.3 联轴器的选用 27
3.1.4 丝杠支承方式的确定 28
3.1.5 导轨的选用 29
3.2 X-Y工作台基座结构设计 32
3.2.1 X轴方向的底座设计 32
3.2.2 Y轴方向的支承箱体设计 33
3.2.3 工作台的支承板设计 34
3.3 Z轴升降机构装置设计 34
3.3.1 导轨的选用 34
第4章 三维建模仿真及受力分析 36
4.1 机器人机身的结构设计 36
4.1.1 X-Y工作台三维建模 37
4.1.2 工作台三维建模 40
4.1.3 末端执行结构设计 41
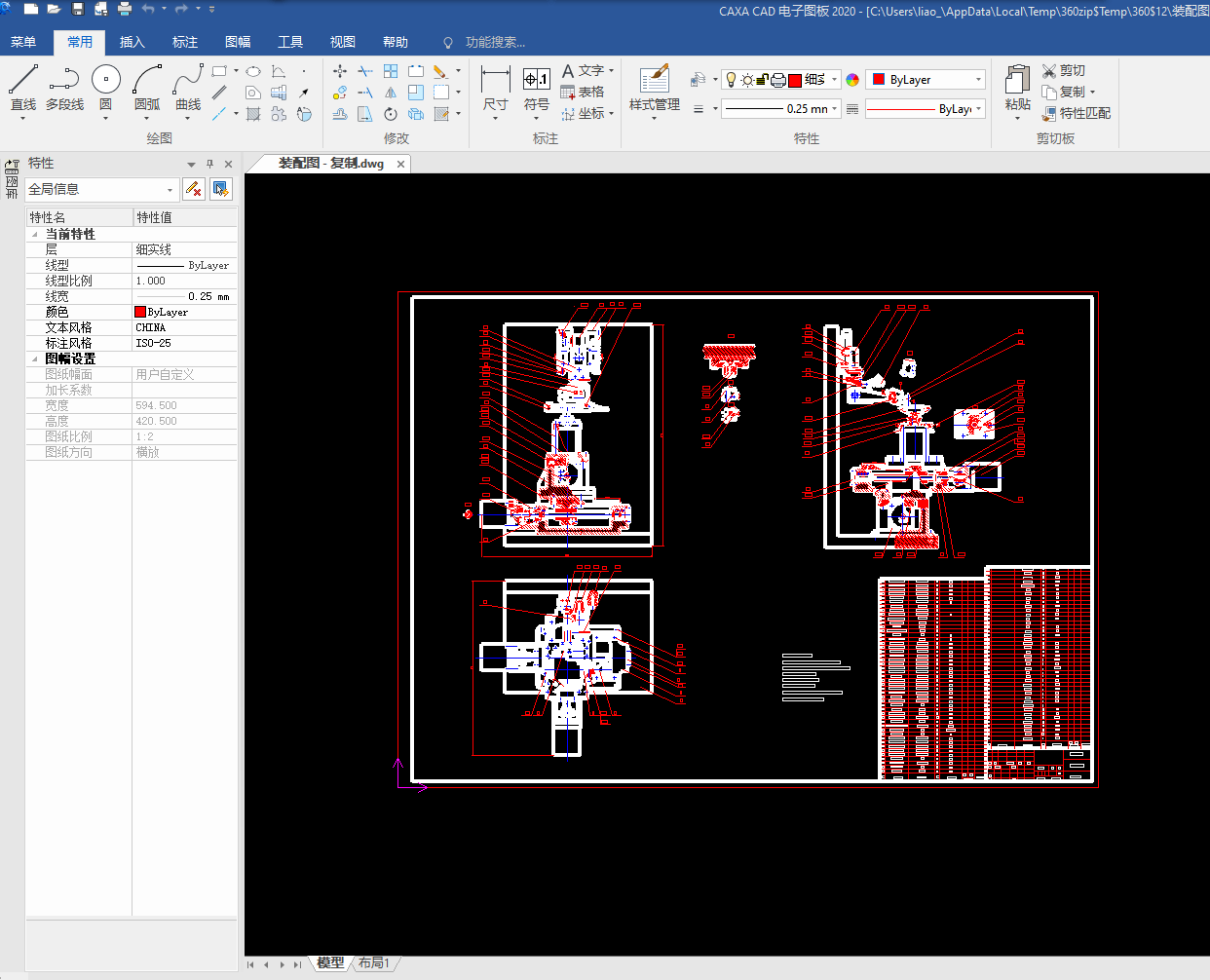
4.1.4 焊接机器人总装配图 42
4.2 芯片自动焊接机器人三维运动仿真 43
4.2.1 创建运动模型 44
4.2.2 运动分析 48
4.3 机器人受力分析 49
4.3.1 手臂的静力学分析 49
4.3.2 滚珠丝杠的动力学瞬态分析 53
第5章 总结与展望 58
参考文献 59
致 谢 60
附 录