����ƥ��ijɱ���������
Heiko Hirschmuller
�����������һ�廯�о����²����һ��ҵ¹����պ������ģ�DLR��
heiko.hirschmueller@dlr.de
Daniel Scharstein
�������������¶������¶�����ѧԺ
schar@middlebury.edu
ժҪ
����ƥ�䷽�����������ڼ���ͼ��λ�������Ե�ƥ��ɱ����ڱ����У����������˲�ͬ��ƥ��ɱ���������ͼ��ķ���仯�IJ������ԡ����ǿ��������ر���ʹ��ڱ���������ͬʱ�ڴ�����������ع���쵼�µ�ȫ��ǿ�ȱ仯���ɽ��Ρ����ʲ������Լ���ͬ���յ��µľֲ�ǿ�ȱ仯���Լ������IJ�ͬ����²������ǵ����ܡ����ǽ�ͨ�����е���ʵ������������������ݼ����Լ����ܿص��ع�������仯�������������������ݼ������þֲ�����ȫ�ֺ�ȫ�����巽��������ͬ�ijɱ���
1.���ܼ���ع���
��������ƥ���㷨����һ�ֲ���ͼ��λ�������Եķ���������ƥ��ɱ�ͨ���ῼ�ǵ�ÿ�����ش����в��졣���ƥ��ɱ������ƥ��ͼ��λ�ô��Ǻ㶨ǿ�ȣ����Ǹ����Եijɱ�ģ�ͻ������ģ��ijЩ����仯�Լ������������Ļ������ص�ƥ��ɱ������ҶȺͲ�ɫͼ��ľ��Բ��죬ƽ�����죬���������еľ��Բ���[2]����ضϰ汾�������Ļ��ڴ��ڵ�ƥ��ɱ��������Բ��ƽ���SAD / SSD������һ������أ�NCC���Լ��Ⱥ��ղ�任֮��[23]��ʹ�ù�����������Ч��ʵ��һЩ���ڴ��ڵ�ƥ��ɱ������磬����ʹ�����˲�����ȡ�������ͨ������ľ��Բ��������ȱ任������������LoG�;�ֵ�˲�����һ���Ĺ��������Գ�������ƫ�������仯��
��������������Ϣ[7,9,11]��Zitnick�����ڷֲ����巽����ʹ�õĽ��Ʒֶλ�����Ϣ[24]�ȸ��Ӹ��ӵ�������Ҳ���ǿ��ܵġ�
������������[5,17]���¶�������������[14]�Ƚ������Ƚ��ļ������巽�����и��ӵļ�����״�Ͳ�ͬ�������IJ������ݡ������������������ʵʱƥ��ľۺϷ���[21]��Щ���档Ȼ��������������Լ�ͨ���dzɶԵط���ز����dz����Ƶ�ͼ����˲������̲�����ƥ��ɱ��IJ������ԡ�
רҵ������Ʒ���ȡ���ָ����ͬ�����㴦��������ͼ�������������ƻ�������ͬ��ֵ���������õ�����ͬ�����Ρ�ͼ�������������������ܻ����������졣��һ���IJ���ԭ���������Ϊ���ʲ����棬��ʹ�÷�������ȡ�����ӽǡ�����ڲ�ͬʱ���ȡ��̬������ͼ��ʱ��ʹ�ù�Դ��ǿ�Ȼ�λ�ÿ��Ըı䣬����ƥ����������ͼ������������������£�����Ҫ�ܹ���������Ȳ���ķ�����
���ĵķ�Χ�ǶԼ��־��г�����������ͼ�����һЩ�㷺ʹ�õ�����ƥ��ɱ��������ͱȽϡ��ص���ƥ�����������������������ijɱ������ų������еķ�����������ݽӽ��Ⱥ���ɫ�����ԵĻ�������Եļ�Ȩ[22]����Ϊ����һ��ʹ�ýضϵľ��Բ�ֵ��Ϊƥ��ɱ��ľۺϷ��������⣬���������ǵ�Ӧ�ã��������ھ���δ֪��������Դ�ĵ���������Ϲ����ķ��������ų���ͨ�����������������в�ͬ����������ͼ��[6]����ҪУ��Դ�ķ�������ȷ�������ʲ�����ķ�����
2.ƥ��ɱ������巽��
����ƥ��ɱ���ʹ����Щ�ɱ��ķ�������Ҫ���ڱ����У����DZȽ���6�ֳɱ���3�����巽�������ǿ������п��ܵ������ȫ������ÿ�ֳɱ��IJ������ԡ�
2.1.ƥ��ɱ�
���ǵĵ�һ���ɱ������dz��õľ��Բ�ֵ����������Ӧ���ص����Ⱥ㶨������Ϊ���������Ļ�����ָ�ꡣ�ֲ����巽��ͨ���ڴ����ϾۺϾ��Բ�ֵ֮�ͣ�SAD������ȫ�ַ���ʹ�����ط�ʽ�IJ��졣������������£�����ʹ��Birchfield��Tomasi��BT���IJ����в����������м���[2]��
�������������ɱ���������ʵ��Ϊ����Ӧ��������ͼ��Ĺ�������Ȼ��ʹ�þ��Բ���ƥ��任��ͼ��һ���˲����Ǹ�˹������˹��LoG������ͨ�����ھֲ�������ȥ��������ƫ��ı仯[10,13]�����������ʹ�ñ�ƫ��Ϊ1���ص�LoG�˲��������˲����ɾ���Ӧ��ʹ��5��5�ںˡ��ڶ����˲��������˲�������ʹij���������������������е����滻���ص�ǿ�ȡ�������[23]�������ڵ��쳣ֵ��³���ԣ���ͨ����������Ȳ�������������������߽�ģ�������ڸ÷�����ȡ����ǿ�ȵ�˳����������ǵ�ֵ����������������б����ķ���������˳����������ʹ��һ�����˲���������һ��15��15���صķ��δ����Ծ۽�������Ϊ���ġ���Ȼ�������������ȵ�ƥ�䷽��[1,16]��������ѡ�����ȱ任����Ϊ��������Ч�ر���Ϊ�˲�����������ı����巽���������������˲����Ǿ�ֵ�˲�����ּ��ͨ����ȥij�������ƽ��ǿ��������ƫ��ı仯�������ٴ�ʹ�óߴ�Ϊ15��15�ķ��δ��ڣ��ô����Ծ۽�������Ϊ���ġ�
���ǵ���һ��ƥ��ɱ��ǻ�����Ϣ��MI����һ����������ͼ��֮�临�ӷ����ϵ����Ч����[20]��ͨ����ÿ��ͼ����ص����ֵ�ֱ��ͼ���ؽ�����ͣ�����ȥ���ض�Ӧ��ϵ������ֱ��ͼ��������������ͼ���MI��MIֱֵ�ӱ�ʾͼ���ע��̶ȡ��������ڹ۲쵽��������ͼ�������ֱ��ͼ�����м����߷壬������ֱ��ͼ�൱ƽ̹����ˣ�������������ͼ������ֱ��ͼ���ؽϵͣ�������ֱ��ͼ���ر仯��С��MI�ѱ����ڱ���[7]��ȫ��[11]���巽�����ں�һ������£��������̩��չ���任���Ի�����ط�ʽ��ƥ��ɱ����ڳɱ�������Ϊÿ��ǿ����ϴ洢�ɱ����˲��ұ���ƥ��������ģ���ֻ�ܴ���֪�Ķ�Ӧ��ϵ�д������ý�������ǵ�����ƣ�����ǰһѭ�����Ӳ�ͼ�����ڴ�������һѭ����ƥ��ǿ�ȵijɱ�����[11]���ù���������Ӳ�ͼ��ʼ������ͨ������Ҫ3��4�ε�����
�ڱ����У�����ʹ��[9]�ĸ�Ч�ֲ�MI��HMI���������乤��ԭ�����¡����ȣ���������ͼ������16��С������ͨ��ʹ������Ӳ�ͼ��ƥ������ͼ��������MI���ڶ��Ӳ���зŴ�֮ǰ�����ù��̼��Σ���������ȫ�ֱ��ʵ� 1 ƥ��ij�ʼ�²⡣�ظ�������ƥ�䣬ֱ���ﵽ�����ֱ��ʡ�Ӧ��ע�⣬�ϵͷֱ��ʼ�����Ӳ�ͼ������ڼ���ϸ߷ֱ��ʼ����ƥ��ɱ����������������ӲΧ��������巽��������ʱ�����Ե������ڣ���ֲ���������ʱ������Ϊ14���������Ͳ���[9]��
������ǻ������˹�һ������أ�NCC����NCC������ƥ��ؼ�������Χ���������ڵı������������ڵĹ�һ�������������ƫ��IJ��졣NCC��ͳ�����Dz�����˹��������ѷ�����Ȼ����NCC������ģ����Ȳ������Զ�������������ƥ��ɱ�����Ϊ�쳣ֵ����NCC�����еĸ���MNCC�ѱ�Moravec [15]������Ϊ�������塣����ѡ���NCC����ΪMNCC�����ǵ�ʵ���и������Բ�Ľ�����������ڴ˿��ǵ���������ƥ��ɱ���ȣ�NCC��������ڴ��ڵ���ƶ�ֻ���뱾�ط���һ��ʹ�á�
���������гɱ��У����ǽ�ʹ��ͼ��ǿ�ȣ����ȣ���������ɫ����ƥ�䡣ԭ���������ǵ����ɳɱ�������ȼ���MI����Ȼ�ض�����ǿ��ͼ���ϣ�����Ϊ�˹�ƽ�����������Ҫ�Ƚ���ͬ���������ϵ����гɱ������ǣ����ǻ����֣���Щ������չ����ɫ�ijɱ�ֻ�������ǵ����ݼ�������ߡ���Ȼ��ǿ���ɫ��ƥ����Ҫδ����һ�����о���
�ܶ���֮�����DZȽ������ֳɱ������������еľ��Բ�ֵ��BT�������ֻ����˲����ijɱ���LoG���Ⱥ�ƽ��ֵ�����ֲ㻥��Ϣ��HMI����һ������أ�NCC����
2.2.�����㷨
ƥ��ɱ�������ȡ����ʹ�óɱ����㷨����ˣ����ǿ������ֲ�ͬ�������㷨���ֲ��ģ�������صķ�����Corr������ȫ�ַ���[9]��SGM�����Լ�ʹ��ͼ�и�[4]��GC����ȫ�ַ���������Ϊÿ�����巽��ʵ��������ƥ��ɱ��г��˽��뱾�ط���һ��ʹ�õ�NCC��ÿһ�֡�

ͼ1. Tsukuba��Venus��Teddy��Cones����Ե���ͼ��
���ǵľֲ����巽����Corr����һ�ֻ��ڴ��ڵļ���[10,13,17]������ƥ��ɱ���ʹ��9��9���صķ��δ��ڣ�ѡ�������;ۺϳɱ��IJ��죨Ӯ��ͨ�ԣ�������Ȼ���������ز�ֵ������һ���Լ�飬����ʹ�ڵ��Ͳ�ƥ����Ч���Լ�С��160���ص��Ӳ�ε���Ч[8]��ͨ���������ڵ�С�����������Ӳ�ֵ�������Ч���Ӳ�������Ƚϡ�ԭʼ�������ȣ�����ִ����Щ���������ԭ���Ǽ���������Ӷ����Ƴɱ�֮�������
���ǵĵڶ��������㷨�ǰ�ȫ��ƥ�䣨SGM������[9]������ѡ������Ϊ���غ�ȫ��ƥ��֮��ķ�����������л����������������綯̬��̣�DP������SGM����DP���Ҳ�������κ�����αӰ��SGMּ����С��ȫ���ά��������E��D��ͨ�����������1D��С�����⡣�ڴ�[9]֮��ʵ��ʹ�õ�������
 ��1��
��1��
��1���ĵ�һ�������������Dp������������p�����ط�ʽƥ��ɱ�C��p��Dp������2.1���������壩���ܺ͡�����T[]������Ϊ��������Ϊ����1������0�����������������ĵڶ��p����������Np��С���������ɱ�P1���гͷ������Ƶأ��������Խϸߵijͷ�P2���ͷ��ϴ�IJ��첽�裨���������ԣ���P2��ֵͨ����������p��q��ʽ ����Ӧ�ֲ�ǿ���ݶȡ���¸���������Ȳ������ԣ���Ϊ���Ǵ����ǿ�ȱ仯һ�¡�
����Ӧ�ֲ�ǿ���ݶȡ���¸���������Ȳ������ԣ���Ϊ���Ǵ����ǿ�ȱ仯һ�¡�
SGMʹ�ö�̬��̼������Ŵ�8��������ÿ���ؼ����ص�1D·����E��D��������ÿ�����غ��Ӳ������·���ijɱ���͡�Ȼ����Ӯ��ͨ��ȷ�����졣ִ�������ز�ֵ�Լ�����һ���Լ�顣����20���ش�С���Ӳ�Ƭ����Ч������СƬ�쳣ֵ���ٴβ�����Ч�IJ��졣
�������ʹ��ͼ���иGC�������㷨��Ϊȫ�ַ����Ĵ���[3,4,12]�����ǵ�ʵ�ֻ���[19]�ṩ��MRF�⡣���dz���ʹ����SGM��ͬ����������E��D�������ǣ����Ƿ��ֶ���GC���������ṩ���õĽ��ʹ�ɱ�P2����ǿ���ݶ�������ƥ�䣬����ʹP2��ֵ�ӱ��ڸ�����ֵ���µ��ݶȡ���SGMһ����GC���ӽ�ȫ����С��E��D��������SGM��ȣ���ʹ��������2D������Ϊƽ�����SGM��������1D·���������֡���Corr��SGM��ͬ�����ǵ�GCʵ�ּȲ����������ز�ֵҲ�������ڵ���
����ʹ��û�з�������ͼ��Ϊÿ���ɱ������ֶ�����SGM��GC��ƽ���Ȳ������ڵ�����֮������ͼ���ʵ������в��������ֲ��䡣�����������רע�ڱ���ƥ��ɱ����������巽����
3.����
���Dz���������ƥ��ɱ���������ϣ��Լ�����ģ���ʵ�ʷ���仯��ͼ���ϵľֲ�����ȫ�ֺ�ȫ�������㷨��
3.1.ģ�����仯
�������ǵĵ�һ��ʵ�飬����ʹ�ñ���Middlebury�������ݼ�Tsukuba��Venus��Teddy��Cones [17,18]��ͼ1��ʾ��ÿ�����ͼ������ͼ������ʵ��������ϸ�����������ú���ͬ�����������¡���ˣ�Ԥ�Ʒ���仯������С�ġ�����ʹ����Tsukuba��16���ز��췶Χ��Venus��32���غ�Teddy��Cones��64���ء�
��һ��ʵ��������Եأ�������仯���ͷ����Եأ�����٤���仯����Ϊ�ظı�ȫ�����ȡ�ֻ��������ȷ������ͼ��ͬʱ������ͼ�䡣���⣬����Ӧ����ģ�½���Ч���ľֲ����ȱ仯�����������ŵ�ͼ�����ĵľ���ɱ����ؼ�С������������ͼ����ִ�иñ任����������ò�ͬˮƽ�ĸ�˹������Ⱦ����������ͼ��
�ڼ��������б任���Ӳ�ͼ���Լ�ƥ��ɱ��������㷨���������֮������ͨ��������������ʵ������1�IJ��������������������������ǵ�ͳ���У����Ǻ������ڵ�������ΪGCʵ�ֲ������ڵ�����Corr��SGM�෴����������ؽ�������ǻ�������ͼ��߽紦��4�����أ���ش��ڵ�һ�룩���������ǵ������������������ĸ����ݼ���ƽ�����ٷֱȡ�ͼ2����Щ������Ϊƥ��ɱ������巽����ÿ����ϵ�ǿ�ȱ仯���ĺ����������������۸�������
ͼ2a�Ƚ��������Ƚ��͵�ͼ�������ʱ��ƥ��ɱ����������ȵĽ��ͣ�BT������Ѹ�����ӡ����ǿ���Ԥ�ڵģ���Ϊ���Բ��������Ӧ���ؾ�����ֵͬ�ļ��裬����Υ���ġ���ֵ��LoG�˲������Բ���һЩ���죬���ή�͡���s <0.5ʱѸ�٣������˲�����������ڲ���ƫ�ã����㶨ƫ�ƣ������������棨����ģ���仯��NCC��HMI��Rank���ֳ��dz��ȶ������ܣ�ֱ������ͻȻ���ӡ��������Ͻ��������ַ�����Ӧ���ܹ���ȫ�������ȵı仯����������ԭ���DZ任���ͼ�洢Ϊ8λ����ˣ���������Ϣ��ʧ��sֵ�ϵ͡�
����������ͼ�����Կ���SGM��GC��ͼ2b-c��ͨ��������Ը��á���ͬƥ��ɱ������������Ȼ���ƣ����ܶ���SGM��LoG�ɱ�����������δ�任ͼ���ϵ�Rank��������������Ϊ1����һ������Ҫ�Ĺ۲�����HMI�����ܱȾ�������Ե�Rank�����ʹ��SGM��GCҪ�õöࡣ���ܵ�ԭ����Rank����������Ȳ������㸽���쳣ֵ��Ӱ�졣����ڻ��ڴ��ڵķ�������Ҫ����������SGM��GC�����Ļ������صķ�������ô��Ҫ����Ȥ���ǣ��ڷ�ת��ͼ���ϣ�HMI����������BT���ر��Ƕ���SGM��GC��ͼ2b-c�������Լ���BT����û���κη�������ͼ��Ӧ������ѵġ�Ȼ������ʹͼ�������ܿ�����������ģ�һЩ����Ȳ����ǹ��еģ�����Ҳ�����ʲ��ģ�������ȻΥ�������Ⱥ㶨�Լ��衣HMI������������貢��ֻ����ȫ��һ�µ�ӳ�䡣
������������ͼ��ͼ2d-f����ʾ��٤���仯��Ӱ�죬��Ϊ���ȷ����Ա仯��һ�����ӡ�������������Ա仯�����������NCC����������٤���仯�����Ӷ����͡�
����HMI֮�⣬�˹�����Ч����ͼ2g-i����ȫ�����ȱ仯��ȸ����˷dz����Ƶ����ߡ�HMI�����൱���ԭ��������ɱ���ȷ�ػ��ڸ��ӵ�ȫ�ַ���任�ļ��衣����Ч���ֲ��ı����ȡ��������������LoG��MeanҲ����ȫ�ֱ仯�����������൱С�Ĵ����ڡ����⣬Rank����Ҫ���ֲ���Ķ�������ˣ��˲������������������Rank���ھֲ�������ǿ�仯���������ѡ�
������������ͼ����ʾ�˾��б仯������ȣ�SNR���ļ��Ը�˹�����Ľ����ͼ2j-1����SNRֵԽ����ζ������Խ�͡���������ԣ���ͬ�ijɱ�ִ�зdz����ƣ���������Ϊ�ڹ̶���������;���ƽ��һ�����⽵���˸�˹������Ӱ�졣SGM��GC�������ͬ������LoG��Rank��Mean����������BT�HMI����������������ʼ������SGM��GC��
�ܽ�����ʵ�飬Rank�ƺ��ǻ�������Եķ��������ƥ��ɱ�����ȫ�����ȱ仯���������ڵ�����£�HMI�ƺ����ʺϻ������ص�ƥ�䷽������SGM��GC���ھֲ����ȱ仯�����罥�Σ�������£�Rank��LoG�ƺ��DZ�HMI���õ�ѡ��
3.2.��ʵ�ع��Դ�仯
�����������������е�����������ݼ��dz������Եء��ɾ��������Ҳ���Ҫʵ������Ӧ�������ǿ��ƥ��ɱ�����������һ���������ۺ������˱仯����Ϊ�˽���������������ʹ��[18]�Ľṹ���������������˼������л�����ʵ�����������ݼ�������http://vision.middlebury.edu/stereo/data/�л�ȡ���ڱ����У�����ʹ��ͼ3����ʾ���������ݼ���Art��Books��Dolls��Laundry��Moebius��Reindeer��ÿ�����ݼ����������ߵĵȾ���ȡ��7��У����ͼ���Լ��ӵ�2��6�ĵ���ʵ���Ӳ�ͼ���ڱ��������ǽ�����˫Ŀ�������������ʹ��ͼ��2��6��Ϊ��������ͼƬ�����⣬���ǽ�ԭʼͼ���²��������Ǵ�С������֮һ�����´�Լ460��370���ص�ͼ����80���صIJ��췶Χ���ڴ������ݼ�ʱ������ʹ��������ͬ��չ������ÿ��ͼ��ȷ����Դ�����ֲ�ͬ���õĹ�Դ����ˣ����Ǵ�ÿ���ӵ���9����ͬ��ͼ����Щͼ����ֳ����ŵķ����ͼ4��ʾ��Art���ݼ���ͼ����ع���ձ仯��
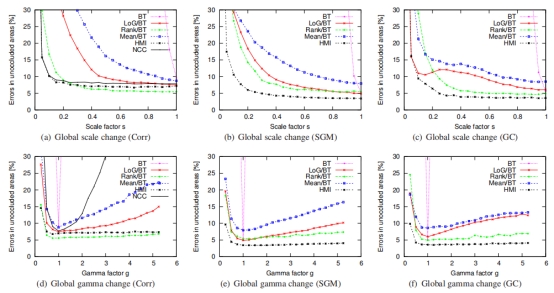

ͼ2.��Tsukuba��Venus��Teddy��Cones���ݼ�Ӧ�÷���仯��������Ӱ�졣�ж�Ӧ���������巽������ÿ�б�ʾ��鲻ͬ���͵�ǿ�ȱ仯��
���Dz�����ƥ��ɱ����������������������3��3�ع�����ϵ��㷨����ƥ�������ǰ��������Ϊ�����������ݼ����쳣ֵ��ƽ���ٷֱȣ��Ӳ����> 1�����õ���������ͼ5��ʾ��Ӧ��ע����ǣ������������ӲΧ��ȱ���������Լ������ӵij�������ʹ�����ǵ���ͼ��ȵ�3.1����ʹ�õ�ͼ�������ս�ԡ��ⷴӳ�ڽϸߵ�ƥ������У���õķ������ھ��д�Լ10������������֮ǰ�Ĵ�Լ3����

ͼ3.���л�����ʵ�����������鼮����ż��ϴ�£�Ī����˹��ѱ¹�������ͼ��

ͼ4.�������ֲ�ͬ�ع�����ֲ�ͬ����������Art���ݼ�����ͼ��
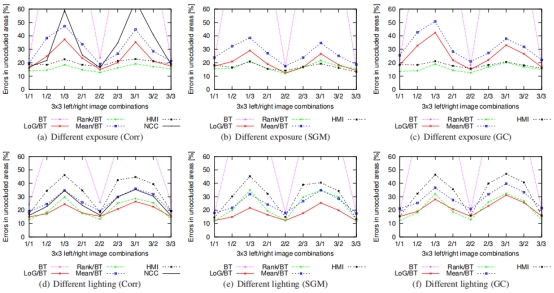
ͼ5.ƥ���ع������������ͬ��3��3��/��ͼ����ϡ���������ƽ����
ͼ5a��ʾ���ھ��в�ͬ�ع����õ�ͼƬ��ʹ������ƥ��ɱ�������ԵĽ�����ع�ı仯��һ��ȫ�ֱ任��������ȫ�����ȱ仯����ˣ��۲�����ͼ2a��2d�еĹ۲������Ʋ������˾��ȡ���Rank��HMI������ѣ���LoG��Mean�и������⣬��Ϊ���Dz���Ϊ��������仯����Ƶġ���Ҫ��������NCC�������֡���SGM��GCƥ��ɱ���������ͼ5b-c��ʾ����3.1����ȣ�Rank�������Ժ���HMI���ر����ھ�����ͬ�ع����õ�����¡����⣬��������Rank�ı����Բ�����ȫ����������Rank�ı��֡�ԭ�������Rank���쳣ֵ��³����������������������ս�Եij�����
�ı��Դ��λ�ûᵼ������ֲ�����������졣��ؽ����ͼ5d��֤ʵ����ƥ��ɱ���������Щ���ر仯�����⡣Ȼ����Rank��LoG�ٴ���ѣ���HMI����BT���á������˹�����Ч��������ͬ��ͼ2g����SGM��GC��������ƣ�ͼ5e-f��������Rank��LoGҲ�DZ�����ѵijɱ���HMI��Ȼ���ڸ��������仯�����⣬���¾ֲ����ȱ仯�����ܱ�ʾΪȫ�ֱ任��
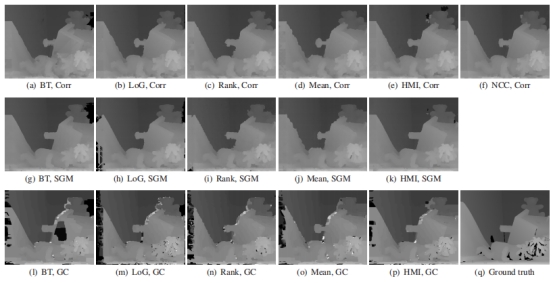
ͼ6.û�з���任��̩�϶Ե��Ӳ�ͼ��
3.3.��������
������3.1����ע�����ʹ��û���κζ������任��ԭʼͼ���ϣ�ƥ��ɱ�֮��Ҳ�������ܲ��졣Ϊ�˶���Щ������ж��Է��������Ǽ��������ͼ�����ƥ��ɱ����㷨��������ϵ��Ӳ�ͼ��
���ڿռ����ƣ����ǽ�ΪTeddyͼ�����ʾ�������Ӳ�ͼ����ͼ6����էһ����������ؽ�������������ƣ�ͼ6a-f�������ǣ���BT����п��Կ�����������⣬�ڹ۲��̴�ʱ��Rank��HMI�ƺ�����Ȳ���������ɽ��ٵ�Ť������֤ʵ��3.1����Rank��HMI������ѵĽ��������SGM���������ͼ6G-K����BT��HMI������ѵ�����߽磬��LoG��Rank�������Ǿ�ֵ�˲����ᵼ������߽��Ť����GC��Ч�����ƣ�ͼ61-p��������һ�£�GC��ʵʩ�������Ա��������ƣ���ˣ�Ӧ������������߽�Ĵ�������������ͼ����Ϸ��������Ƶ���Ϊ��
3.4.����
����Ӧ�ó���Ҫ��ȷ�IJ��죬��Ҫ����ٵ�����ʱ�䡣��1������Teddyͼ��Ե�LoG��Rank��HMI���㣨���������巽��������ʱ��������ʱ�䡣���еķ�������
�ھ���2.8 GHz��Pentium 4�ϲ�����Teddyͼ��Ĵ�СΪ450��375���ء�LoG�˲���ʹ��5��5�ںˣ�Rank�˲���ʹ��15��15�ںˡ�100 ms HMI������ʱ���������ʱ��
��Сͼ���Լ����в�μ����MI���㣬������ͼ���С�� 1 ��ʼ�����⣬���巽��������Ҫ��ȫ�ֱ���ͼ�������У�����Ҫ����С�ߴ��ͼ�������С�����Corr��SGM����ȫ�ֱ����²����Ŀ�����ԼΪ������ʱ���15����
��1. Teddyͼ���ϵijɱ���������ʱ�䡣
|
����
|
LoG
|
Rank
|
HMI
|
|
����
|
20ms
|
35ms
|
��100ms+15%
|
|
ʵʩ
|
C/MMX
|
C/MMX
|
C
|
Ӧ�þ�ֵ�˲�����NCC�����ʱ�䲻�������ڣ���Ϊ��Щ��������Javaʵ�ֵģ���û�н����Ż���
4.����
���DZȽ��˼��ֲ�ͬ�ijɱ����������ڷ����Բ�ͬͼ���ϵ�����ƥ�䡣ʹ�����ֲ�ͬ�������㷨����ÿ���ɱ����ֲ���ط�������ȫ��ƥ�䷽����ʹ��ͼ�и��ȫ�ַ��������Ƿ���ƥ��ɱ�����������ȡ����ʹ���������巽�����ھ���ģ���ʵ�ʷ���Ȳ����ͼ���ϣ��ȱ任�ƺ��ǻ�����صķ�������ѳɱ����ھ���ȫ�ַ���仯�������IJ����У��ֲ㻥��Ϣ���ڻ������ص�ȫ��ƥ�䷽������SGM��GC��������ѡ��ڴ��ھֲ�����仯������£�Rank��LoG��SGM��GC��HMI���ָ��á�
��û�з���任��ͼ����Ӳ�ͼ����ж������������������˲����ijɱ���LoG��Rank��Mean��������ģ������߽硣�ⲻ��Ӱ����ؽ������Ϊ�̶���С����ش���������ζ��ᵼ��ģ���IJ������ԡ��෴����Щ�˲���ʵ���Ͽ��Խ��������⣬�ر������˲����������Լ��ٲ������㸽���쳣ֵ��Ȩ�ء����ǣ����ڻ������ص�ƥ�䷽������SGM��GC����ģ��Ч�������ɼ������������ķ�����BT��HMI�Ľ����������á�
�������Ƚϵ�ƥ��ɱ���û��һ���ڴ����ɸı��Դλ�������ǿ�ҵľֲ�����仯����dz��ɹ���������Խ���ͬ�ɱ������ƽ�������Ի���ܹ�������Rank��LoG�����ľֲ�����任��ƥ��ɱ�ͬʱ��Ȼ������HMI�����ļ�����Ȳ������ԣ��ǽ��Ǻܺõġ�
δ���Ĺ����������Կ��Դ�������Ȳ��������ƥ��ɱ��������˿��ղ�任[23]��Zitnick���˵�MI����[24]��
��л
����Ҫ��лAnna Blasiak��Jeff Wehrwein��������������ʹ�õ����ݼ���
�ο�
[1] D. Bhat, S. Nayar, and A. Gupta. Motion estimation usingordinal measures. In Proc. CVPR, 1997.
[2] S. Birchfield and C. Tomasi. A pixel dissimilarity measurethat is insensitive to image sampling. TPAMI, 20(4):401-406, 199.
[3] Y. Boykov and V. Kolmogorov. An experimental comparisonof min-cut/max-flow algorithms for energy minimization invision. TPAMI, 26(9):1124�C1137, 2004.
[4] Y. Boykov, O. Veksler, and R. Zabih. Fast approximate energy minimization via graph cuts. TPAMI, 23(11):1222�C1239, 2001.
[5] M. Z. Brown, D. Burschka, and G. D. Hager. Advances incomputational stereo. TPAMI, 25(8):993�C1008, 2003.
[6] J. Davis, R. Yang, and L. Wang. BRDF invariant stereo usinglight transport constancy. In Proc. ICCV, 2005.
[7] G. Egnal. Mutual information as a stereo correspondencemeasure. Technical Report MS-CIS-00-20, Comp. and Inf.Science, U. of Pennsylvania, 2000.
[8] H. Hirschm��uller. Stereo Vision Based Mapping and Immediate Virtual Walkthroughs. PhD thesis, School of Computing,De Montfort University, Leicester, UK, 2003.
[9] H. Hirschm��uller. Accurate and efficient stereo processingby semi-global matching and mutual information. In Proc.CVRP, volume 2, pages 807�C814, 2005.
[10] H. Hirschm��uller, P. R. Innocent, and J. M. Garibaldi. Realtime correlation-based stereo vision with reduced border errors. IJCV, 47(1/2/3):229�C246, 2002.
[11] J. Kim, V. Kolmogorov, and R. Zabih. Visual correspondenceusing energy minimization and mutual information. In Proc.ICCV, 2003.
[12] V. Kolmogorov and R. Zabih. What energy functions can beminimized via graph cuts? TPAMI, 26(2):147�C159, 2004.
[13] K. Konolige. Small vision systems: Hardware and implementation. In Proc. ISRR, pages 203�C212, 1997.
[14] Middlebury stereo website. www.middlebury.edu/stereo.
[15] H. Moravec. Toward automatic visual obstacle avoidance. InProc. Joint Conf. on Artif. Intell., pages 584�C590, 1977.
[16] R. Sara and R. Bajcsy. On occluding contour artifacts instereo vision. In Proc. CVPR, 1997.
[17] D. Scharstein and R. Szeliski. A taxonomy and evaluation of
dense two-frame stereo correspondence algorithms. IJCV,47(1/2/3):7�C42, 2002.
[18]. Scharstein and R. Szeliski. High-accuracy stereo depthmaps using structured light. In Proc. CVPR, volume 1, pages195�C202, 2003.
[19] R. Szeliski, E. Zabih, D. Scharstein, O. Veksler, V. Kolmogorov, A. Agrawala, M. Tappen, and C. Rother. A comparative study of energy minimization methods for Markovrandom fields. In Proc. ECCV, volume 2, pages 16�C29, 2006.
[20] P. Viola and W. M. Wells. Alignment by maximization of
mutual information. IJCV, 24(2):137�C154, 1997.
[21] L. Wang, M. Gong, M. Gong, and R. Yang. How far can wego with local optimization in real-time stereo matching. InProc. 3DPVT, 2006.
[22] K.-J. Yoon and I.-S. Kweon. Adaptive support-weight approach for correspondence search. TPAMI, 28(4):650�C656,2006.
[23] R. Zabih and J. Woodfill. Non-parametric local transformsfor computing visual correspondance. In Proc. ECCV, pages151�C158, 1994.
[24] C. L. Zitnick, S. B. Kang, M. Uyttendaele, S. Winder, andR. Szeliski. High-quality video view interpolation using alayered representation. In SIGGRAPH, 2004.
