模式识别 Fisher线性判别
目录
模式识别 Fisher线性判别 1
一、Fisher线性判别算法介绍 2
1.1 介绍 2
1.2 Fisher准则函数中的基本参量 2
(1)样本 2
(2)在原来的样本空间 2
(3)在投影以后的一维空间 3
1.3 衡量标准与分类 3
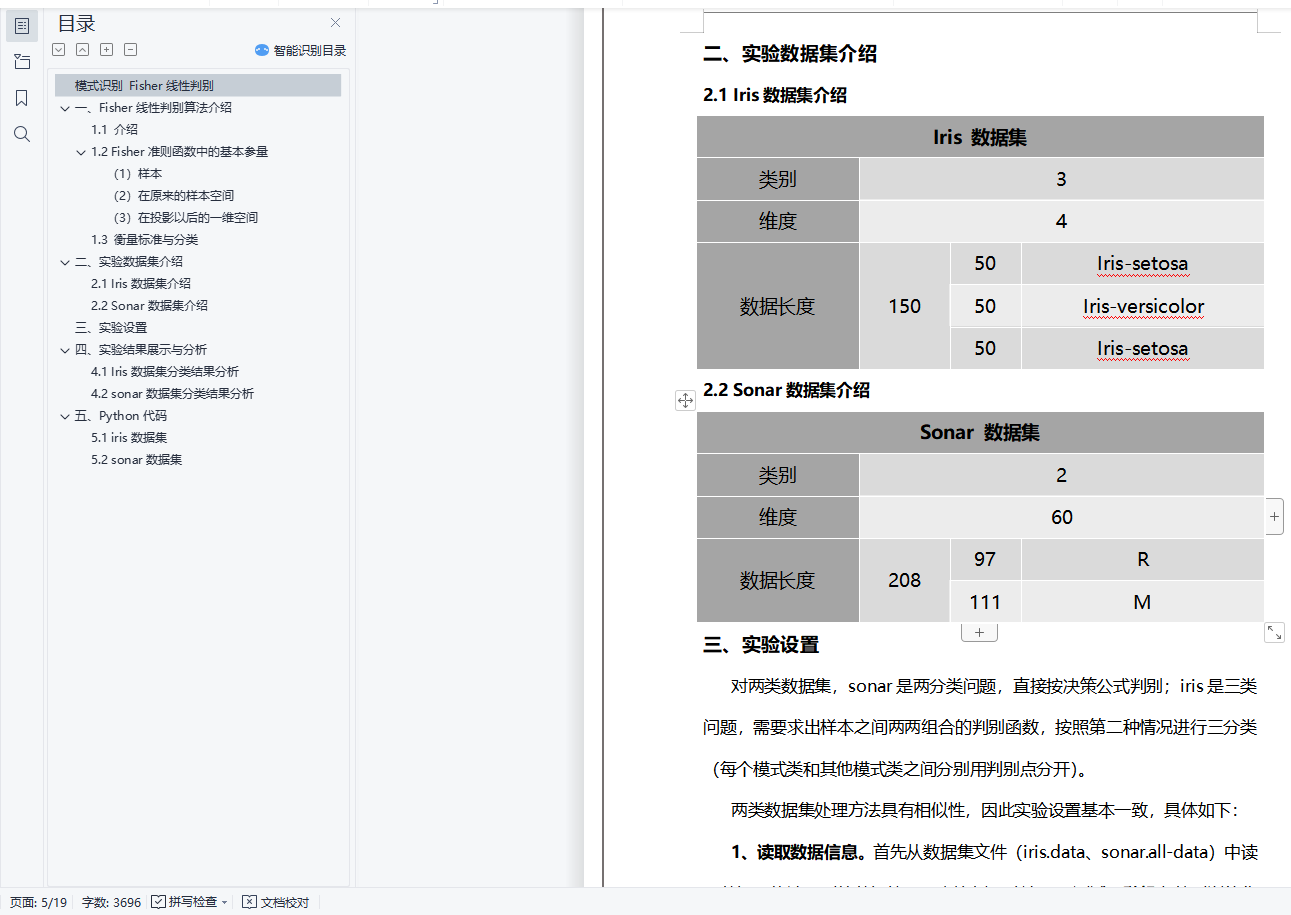
二、实验数据集介绍 4
2.1 Iris数据集介绍 5
2.2 Sonar数据集介绍 5
三、实验设置 5
四、实验结果展示与分析 7
4.1 Iris数据集分类结果分析 7
4.2 sonar数据集分类结果分析 12
五、Python代码 14
5.1 iris数据集 14
5.2 sonar数据集 18
一、Fisher线性判别算法介绍
1.1 介绍
Fisher两类的判别问题可以看作是把所有样本都投影到一个方向上,然后在这个一维空间中确定一个分类的阈值。过这个阈值点且与投影方向垂直的超平面就是两类的分类面。问题是如何根据实际情况找到这条最好的、最易于分类的投影线,这就是Fisher线性判别算法要解决问题。
Fisher线性判别的思想就是:选择投影方向,使投影后两类相隔尽可能远,而同时每一类内部的样本又尽可能聚集。以下部分仅讨论两类问题。