目录
1 引言 2
1.1 研究背景 2
1.2 研究意义 3
1.3 论文组织与结构 3
2 脉冲神经网络 5
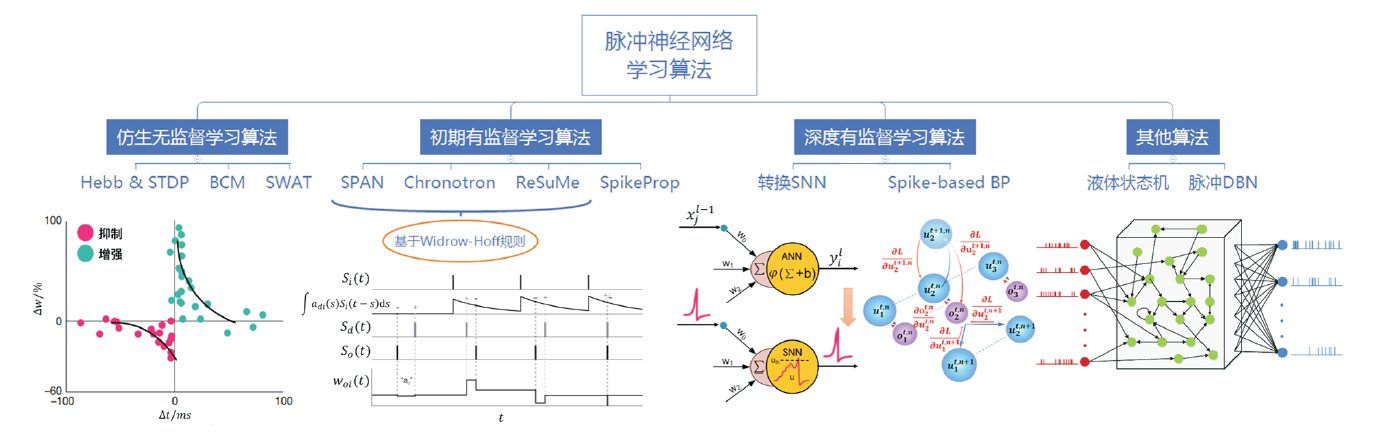
2.1 学习算法 5
2.2 ANN 转化的 SNN 6
2.3 ANN 操作的脉冲实现 8
偏差归一化 8
除异常值归一化 8
3 ANN 模型结构 10
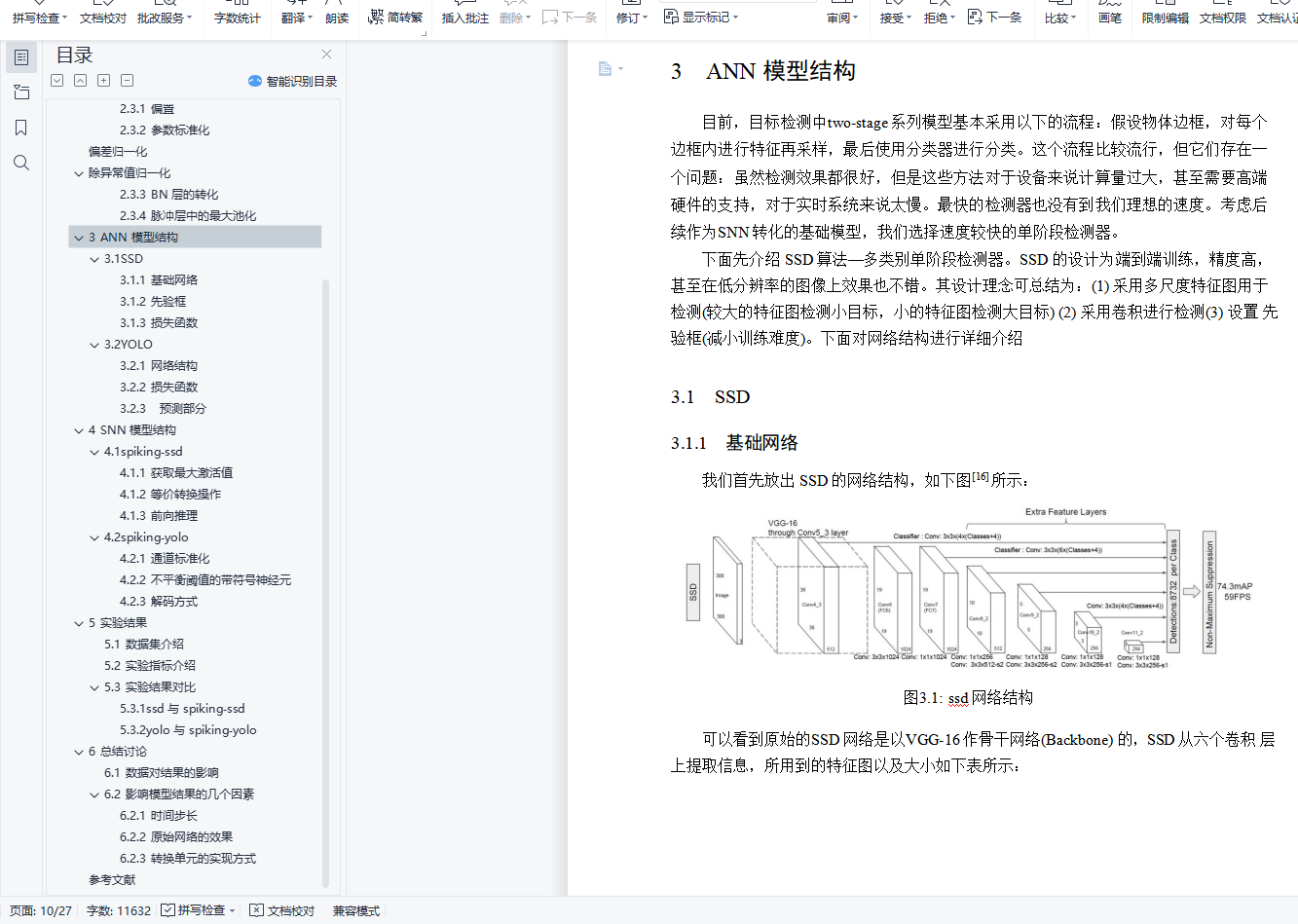
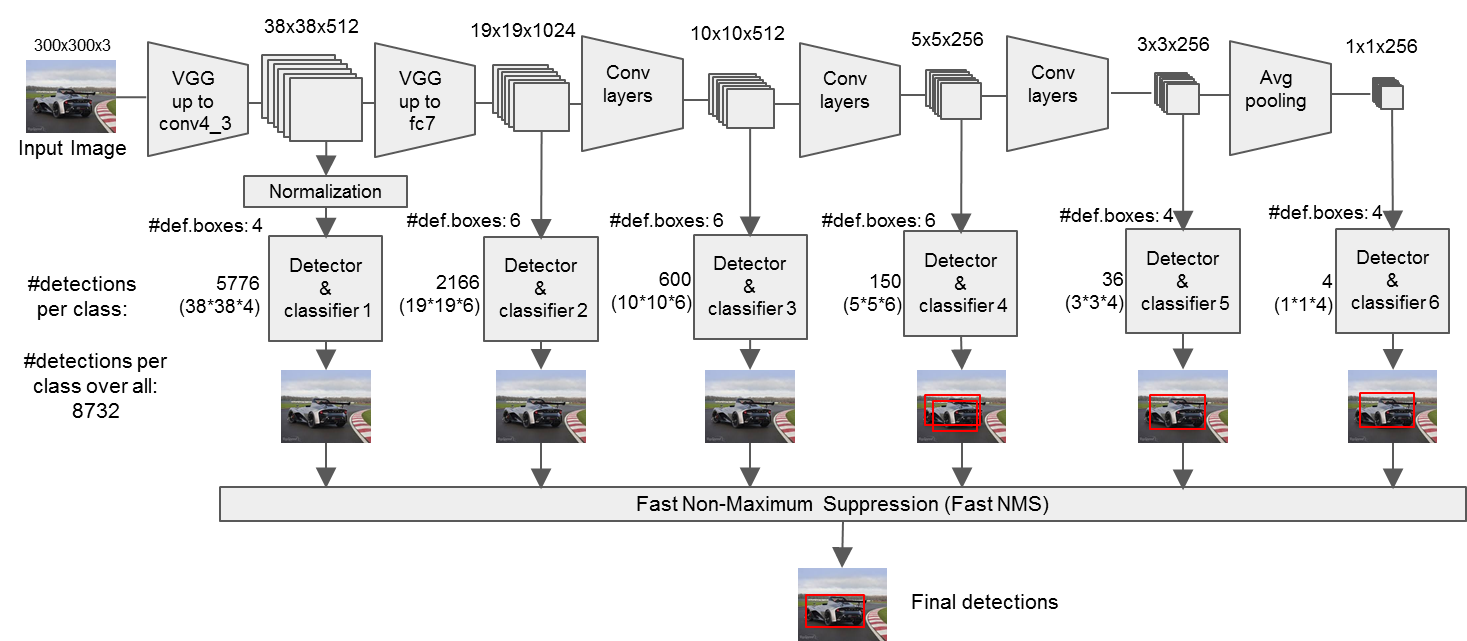
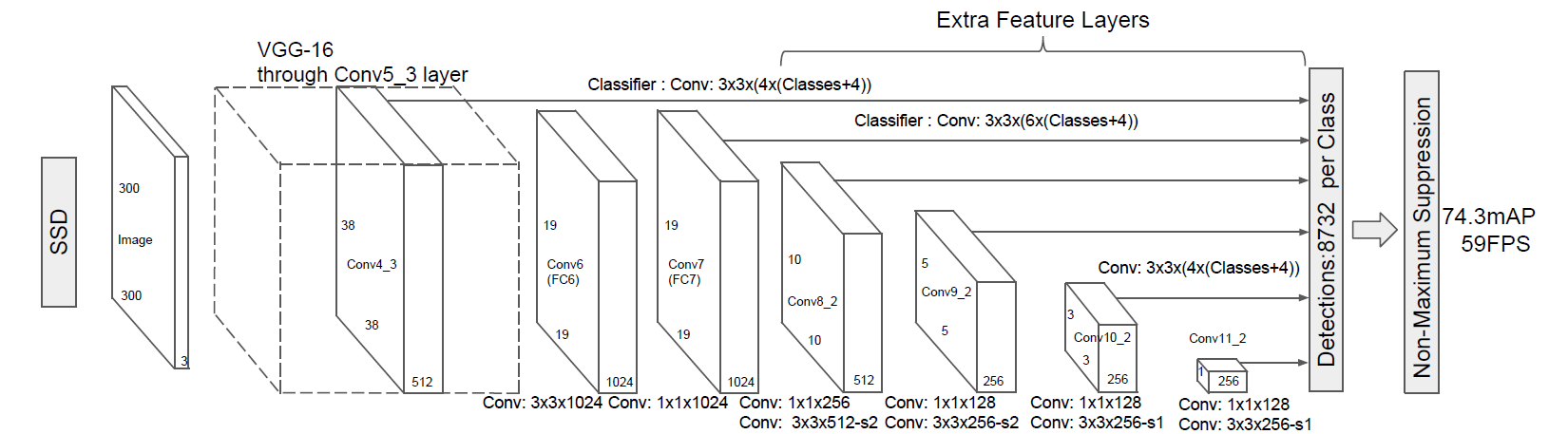
3.1 SSD 10
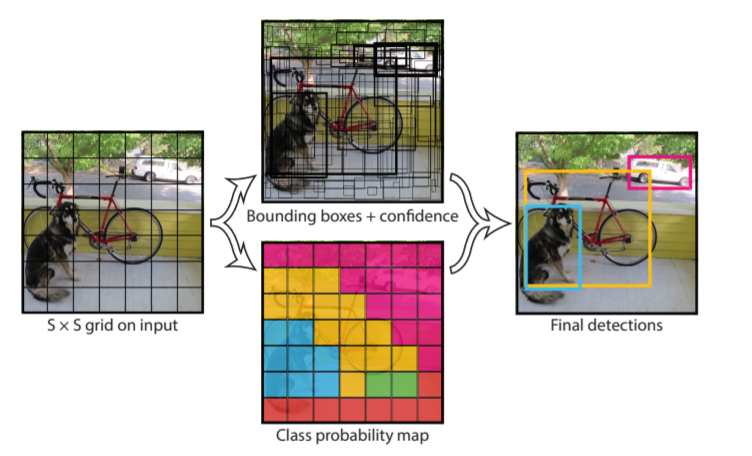
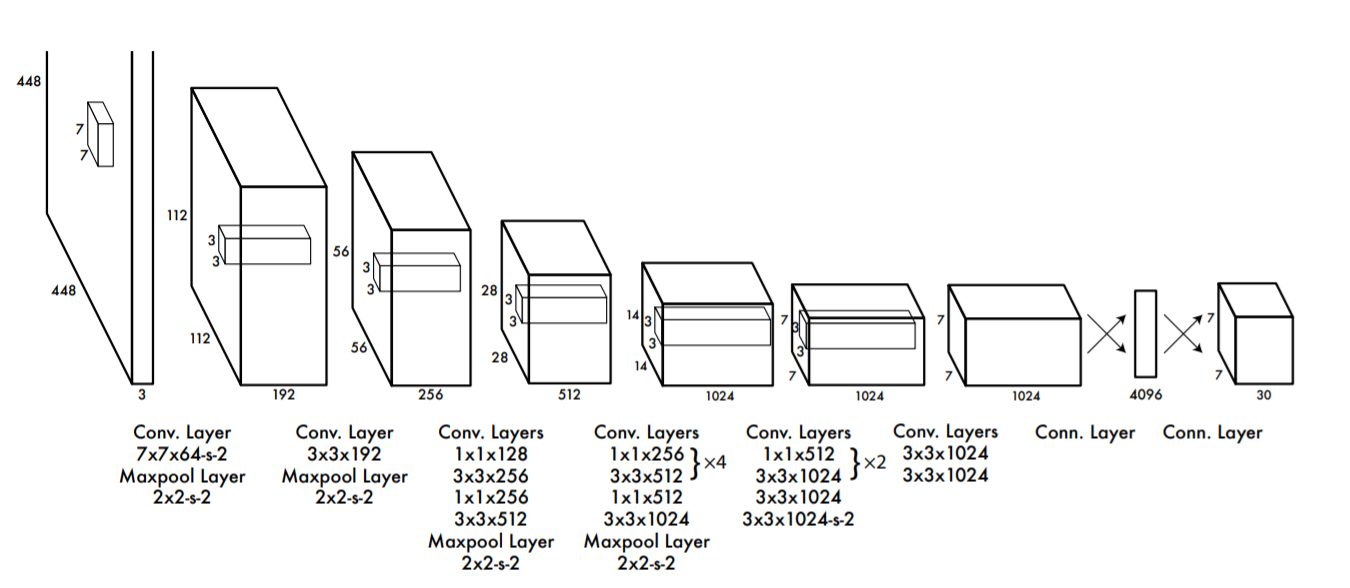
3.2 YOLO 13
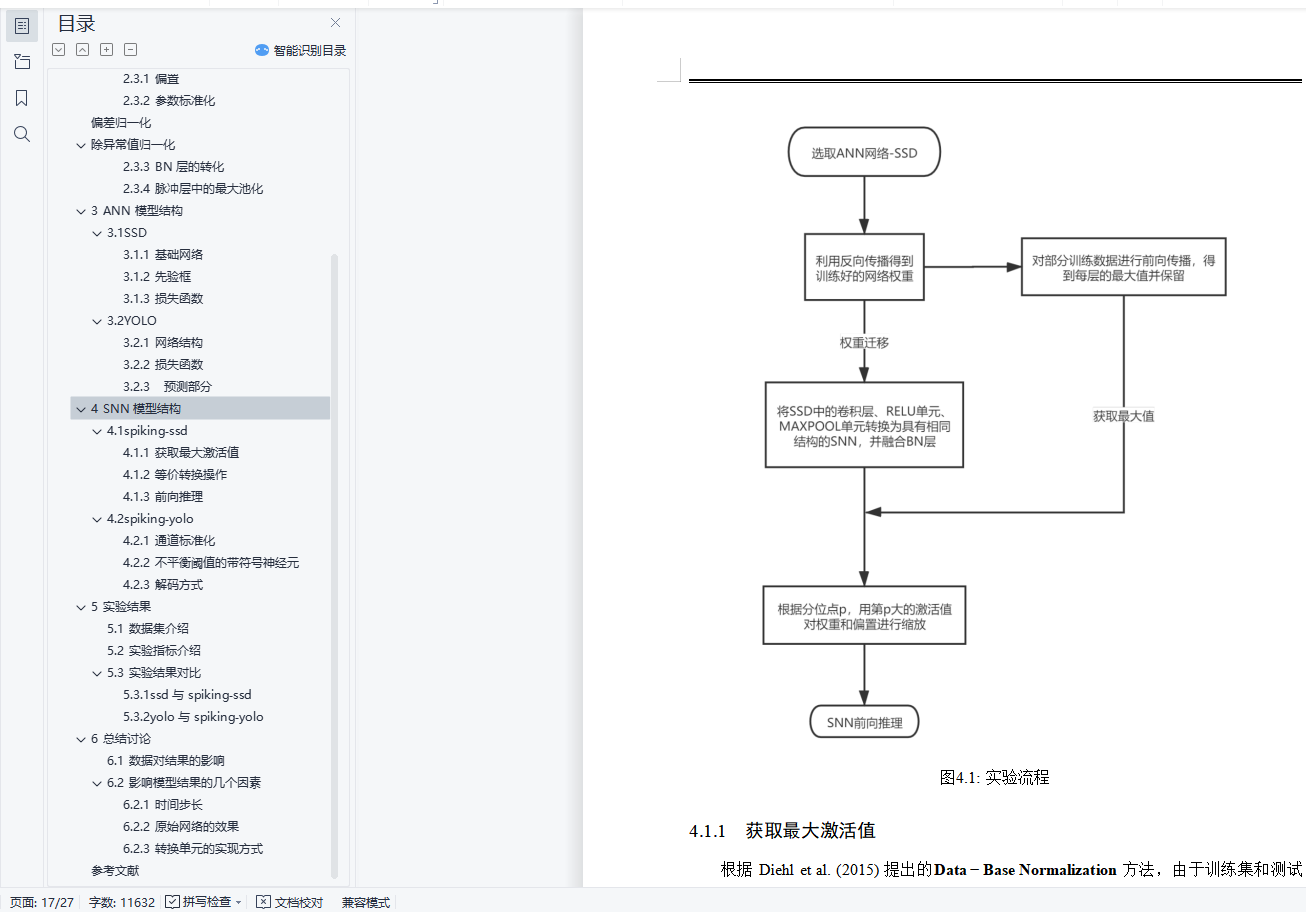
4 SNN 模型结构 16
4.1 spikingssd 16
4.2 spikingyolo 18
5 实验结果 22
5.1 数据集介绍 22
5.2 实验指标介绍 22
5.3 实验结果对比 22
6 总结讨论 25
6.1 数据对结果的影响 25
6.2 影响模型结果的几个因素 25
参考文献 26
1 引言
1.1 研究背景
目标检测是一种应用特定计算机算法在图像中找到所需目标的技术。近年来,随着 计算机硬件的不断发展,目标检测的各种算法也迎来了巨大的突破,越来越多地应用于 交通检测、智能支付、医疗影像等各个方面。在计算机视觉中,目标检测是要比图像分 类更复杂的一个问题,它不仅要清楚目标的类型,还需做到目标的定位。所以,物体检 测的难度更大,挑战性更强,相应的深度学习模型也会更加复杂。
目标检测有许多算法,卷积神经网络(Convolutional Neural Networks, CNN)是其代 表算法之一。它是一个前馈神经网络,具有卷积计算和深度结构。目前,基于卷积神经网 络的目标检测算法大致可分为两种模式,即 twostage 模式和 onestage 模式,twostage 模 式的检测过程分为两个步骤:首先由算法生成若干个候选框,再通过 CNN 对候选框进行 分类;onestage 模式则是端到端的学习,直接对对目标的置信概率和位置进行回归,相 对来说精度有所损失,但速度较 twostage 模式的算法更快。[1]