1. 需求分析
(1) 系统的输入;
系统的输入为一张图像或者视频帧
(2) 系统的输出;
系统的输出为一张标定有人脸的图像,或者视频帧
(3) 系统实现的功能。
实现了图像的多人脸标定以及摄像头实时人脸检测
2. 概要设计
2.1 基本要求
使用了MTCNN深度级联神经网络的多任务框架,该框架由三层网络构成,分别是P-Net、R-Net、以及O-Net。通过分别训练这三个神经网络。将一个网络的输出作为后一个网络的输入。以粗略到精细的方式预测面部的地标位置。指的一提的是,该框架通过选取loss前70%的hard example(比较难训练的样本)执行方向传播,提高了网络的训练效果。经过实验分析,该方法在面部检测中有着卓越精度,同时保持了实时性能。此外,在训练好的模型基础上,设计并开发出一个实时人脸检测系统,适用于门禁,照相以所有需要运用到人脸检测的场景。
2.1.1算法原理
2.1.1.1 面部分类:
学习目标被制定为两类分类问题。 对于每个样本 ,我们使用交叉熵损失:
,我们使用交叉熵损失:

(1)
其中 是网络产生的概率,表明样本
是网络产生的概率,表明样本 是一个面。 符号
是一个面。 符号 表示ground-truth(正确的数据标注,其实就是数据集中的人脸位置以及特征位置) 标签
表示ground-truth(正确的数据标注,其实就是数据集中的人脸位置以及特征位置) 标签
2.1.1.2 边界框回归
对于每个候选窗口,我们预测它与最近的ground-truth 之间的偏移(即边界框的左边,顶部,高度和宽度)。 学习目标被制定为回归问题,我们对每个样本使用欧几里德损失 :
:

(2)
其中 是从网络获得的回归目标,
是从网络获得的回归目标,  是地面实况坐标。 有四个坐标,包括左上角,高度和宽度,因此
是地面实况坐标。 有四个坐标,包括左上角,高度和宽度,因此
2.1.1.3 面部地标定位
类似于边界框回归任务,facial landmark(面部地标)检测被公式化为回归问题,我们最小化欧几里德损失:

(3)
其中  是从网络获得的面部地标坐标,
是从网络获得的面部地标坐标, 是第
是第 个样本的地面实况坐标。有五个面部标志,包括左眼,右眼,鼻子,左嘴角和右嘴角,因此
个样本的地面实况坐标。有五个面部标志,包括左眼,右眼,鼻子,左嘴角和右嘴角,因此
2.1.1.4 多源训练
由于我们在每个CNN中执行不同的任务,因此在学习过程中存在不同类型的训练图像,例如面部,非面部和部分对齐的面部。 在这种情况下,不使用一般损失函数。
例如,对于背景区域的样本,我们仅计算 ,而另外两个损失设置为0.这可以直接使用样本类型指示符来实现。 然后整体学习目标可以表述为:
,而另外两个损失设置为0.这可以直接使用样本类型指示符来实现。 然后整体学习目标可以表述为:
(4)
其中N是训练样本的数量, 表示任务重要性。
表示任务重要性。
我们在P-Net和R-Net中使用

(5)
而在O-Net中使用

以获得更准确的面部地标本地化  是样本类型指示器。 在这种情况下,采用随机梯度下降来训练这些CNN是很合适的
是样本类型指示器。 在这种情况下,采用随机梯度下降来训练这些CNN是很合适的
2.1.2界面设计方案
2.1.2.1 前端界面实现
界面由图片识别模式和摄像头实时识别模式两个部分构成,方便用户操作。如图4-2所示。界面左上侧部分是显示数据源的图片,右上部分是显示人脸检测结果。下班部分用于显示摄像头实时检测情况,可以手动选择开启或者关闭摄像头显示,方便用户操作。
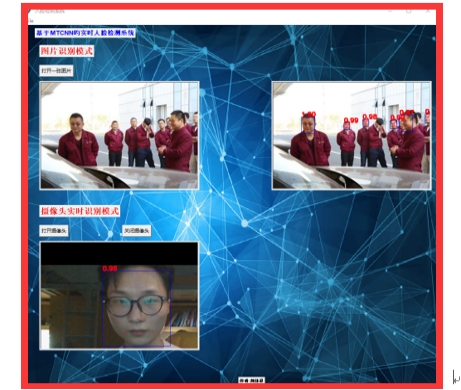
图1 人脸识别系统主界面
2.1.2.2功能逻辑实现
功能逻辑是属于中间部件,需要和前端界面交互,又要调用算法进行处理,属于架构里面不可或缺的部分。首先数据源通过OpenCV进行读取,两种不同数据源,其中图片需要用户先选择,文件选择通过TKinter实现。如图4-3所示,图片支持*.JPG、*.PNG、*.GIF、*.BMP格式。摄像头支持USB、笔记本自带摄像头。

图2 两种种选择方式效果图
3. 详细设计
data下放置训练所用的原始数据和划分数据,生成的tfrecord等
detection下的fcn_detector.py主要用于PNet的单张图片识别,detector.py用于RNet和ONet的一张图片通过PNet截取的多个人脸框的批次识别,MtcnnDetector.py为识别人脸和生成RNet,ONet输入数据
graph里放置的是训练过程中生成的graph文件
output里放置识别图像或视频完成后存储放置的路径
picture里是要测试的图像放置路径
preprocess里是预处理数据程序,BBox_utils.py和utils.py,loader.py是一些辅助程序,gen_12net_data.py是生成PNet的pos,neg,part的程序,gen_landmark_aug.py是生成landmark数据的程序,gen_imglist_pnet.py是pnet的四种数据组合一起,gen_hard_example.py是生成rnet,onet的三种数据程序,gen_tfrecords.py是生成tfrecord文件的程序
train中的config是一些参数设定
model.py是模型,train.py是训练,train_model.py针对不同网络训练
test.py是测试代码
4. 实验结果与分析
4.1多种方法对比
将训练好的模型和多种主流人脸检测方法进行对比,如表4-7所示,人脸检测模型MTCNN在WIDER FACE训练集上表现优异,通过三层训练网络的特征融合、损失函数合理设计,模型效果大大提升,速度达到99帧。
表 1 多种方法在WIDER FACE VAL上评估对比情况
|
Method
|
GPU
|
Speed
|
|
Cascade CNN
|
Titan
|
100
|
|
Faceness
|
Titan
|
20
|
|
DP2MFD
|
Titan
|
0.285
|
|
ours
|
Titan
|
99
|
4. 2多种环境对比
训练好的模型在多种较为严苛的条件下如外物遮挡,水平倾角变换,垂直上倾角变换,垂直下倾角变换,表情变换,环境中增加烟雾等情况下的的人脸检测结果,记录如下:
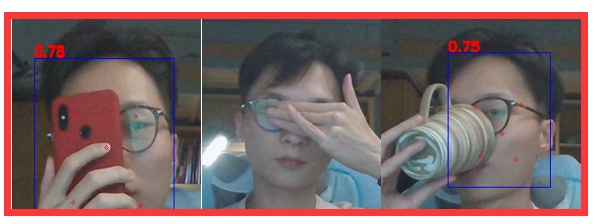
图2脸部遮挡情况

图3脸部水平角度变换分别为45度、60度、90度的识别情况

图4 脸部垂直水平上倾角分别为45度、60度、70度的识别情况

图5脸部垂直水平下倾角分别为45度,60度的识别情况
 图6脸部表情变化为惊讶,生气,开心,难过,疼痛的识别情况
图6脸部表情变化为惊讶,生气,开心,难过,疼痛的识别情况
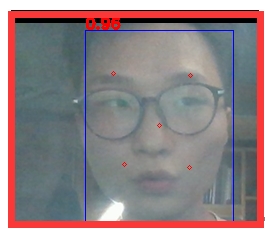
图7 识别环境中存在烟雾的识别情况
实验结果显示,在有遮挡物的情况下,左右遮挡可以正常识别,上下遮挡(如遮挡眼睛)无法正常识别。在水平倾角变换分别为45度,60度,90度的情况下均可以正常识别但是特征点显示标定错误。在垂直上倾角分别为45度,60度的情况下识别正常,上倾角提高到70度时,无法识别。在垂直下倾角为45度的时候可以正常死别,但是角度增加至60度时无法正常识别。在脸部存在各种表情的时候可以正常识别。在环境中有烟雾的情况下可以正常识别。
有上述实验结果可以得出结论,系统在检测人脸的过程中具备水平变换,表情变化,环境噪声的鲁棒性,但是在识别上下角度变化以及特征点被遮挡过多的情况下,识别率会收到影响。
4.3 结论
根据上述实验结果,可以看出MTCNN人脸检测算法相比于其他算法,有着高效,速度快,计算量较小的各方面优势。人脸检测模型识别精度极高。但是也有需要克服的问题:过小的人脸识别精度低、对局部特征识别效果低下。
由上述人脸识别系统可以看出系统将算法和界面融合为一体,可以实现实时的摄像头人脸检测。在多人,遮挡,低光,模糊等条件下有着比较高的匹配精度。
本文从对严苛环境下的人脸检测的需求出发,对基于MTCNN级联神经网络的人脸检测算法进行研究,训练出在各个环境下鲁棒性较高的的人脸检测模型,最后基于Tkinter将算法、界面集成在一起,开发出一款可靠的人脸检测系统。
在人脸检测算法上,采用深度级联神经网络对样本进行分别训练,将上一个网络的输出作为下一个网络的输入,实现高效且准确的人脸检测效果。实验表明这种方法有利于检测不同尺度,不同角度,存在环境噪声的人脸,表现优异。人脸的关键特征检测效果符合人脸识别的标准,实验表明这种结构适用于人脸检测任务,可以有效提取人脸特征,在实时检测中效果好,可用于多种场景下人脸检测。
最后,基于训练好的模型,针对本文需求,开发出了一个人脸检测系统,基本满足各种环境规模下的人脸检测的需求,并且可以用于其他任务。
