智能通风柜手势控制界面设计与实现
摘要:随着传感器的不断发展,简单的信号已经不能满足人们日益增长的对控制的需求。同时,为了方便,传感器向着简化生活的方向不断发展。对于普通的通风柜来说,它单一的功能不能满足简化生活的目的,因此出现了智能通风柜。智能通风柜在单片机的作用下,把输入设备与输出设备有机的结合起来,不仅可以简化操作流程,同时其智能的操作,不仅能够出色的完成当前的任务,同时节省时间,加快工作效率。
关键字:传感器,手势识别, 控制界面,单片机
1. 文献综述
1.1手势识别介绍
基于PAJ7620U2等多种手势识别传感器,它可以识别九种不同方向的手势,包括上、下、左、右、前、后、顺时针、逆时针、摇摆。手势识别模块使用I2C接口,使用相应Arduino库函数即可编程控制,手势识别模块返回的信号可用作通风柜接收的控制信号,从而实现对通风柜的控制。手势识别传感器可用于非接触时控制场景,内置的识别算法可以把双手从生硬的按键中解放出来。
1.2 Arduino单片机介绍
Arduino能通过各种各样的传感器来感知环境,通过控制灯光、马达和其他的装置来反馈、影响环境。板子上的微控制器可以通过Arduino的编程语言来编写程序,编译成二进制文件,烧录进微控制器。对Arduino的编程是通过 Arduino编程语言和Arduino开发环境来实现的。
1.3 硬件架构设计
采用输入设备到处理器到输出设备的控制流程,以电容式触摸板和手势识别传感器作为输入设备,产生所需数据传入到Arduino单片机中进行数据处理,Arduino单片机把需要进行的反馈以数据的形式传给输出设备,从而控制如电机等设备的运行。流程图如图所示:
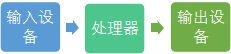
图1.1流程图
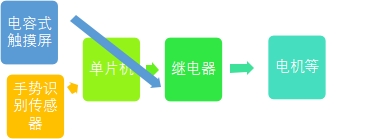
图1.2具体流程图
1.4 电路架构设计
电容式触摸屏使用USART串口通讯协议,可以实现双工通讯,既可作为输入设备,也可作为显示设备;手势识别传感器暂定使用I2C通讯协议,作为输入设备输入数据到单片机中。若效果不理想,可修改通信协议,暂定使用I2C协议。具体构架如图所示:
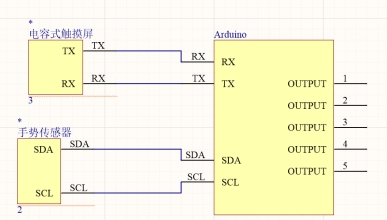
图1.3电路控制原理图
1.5软件及界面设计
软件以Arduino IDE为开发环境,Arduino编程界面如图所示:
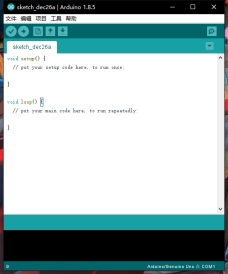
图1.4Arduino IDE界面
界面设计以USART HMI为主,设计触摸屏输入触屏的按钮开关以及显示状态的显示屏。其操作界面如图所示:
图1.5USART HMI界面
1.6 工作原理
通讯是单片机与触摸屏、手势传感器的重要环节。它们通过双工通讯的方式,进行数据间的交换与处理,从而实现对数据的处理、对环境的反馈。同时,控制也是智能机器重要的一环,实现弱电控制强电少不了需要用到继电器,从而在不损坏单片机的情况下,对大功率输出设备,如电机的控制。
2. 选题背景及其意义
人工智能是目前越来越火的词,同时也是未来发展的趋势。让机器懂得人类的语言,懂得人类的手势,让其更加人性化。同时,手势识别是让机器听懂人类语言得其中一种方式。手势控制对于简化操作有着非常重要的意义。它不仅可以让机器听懂人的手势,还可以节省时间,方便使用它的人,使生活更便利
3. 研究内容
3.1单片机的通讯
单片机通讯可以使用TX/RX的串口通讯,同时也可以使用I2C协议进行通讯。虽然它们之间的协议不尽相同,但是都可以实现设备间的通讯,完成数据间的交流与处理。TX/RX的串口通讯协议只需设备间的TX/RX相互交错连接,即可实现通讯,且可同时实现通讯。I2C通讯中总线只有两根双向信号线,一根是数据线SDA,另一根时时钟线SCL。原理如图所示:
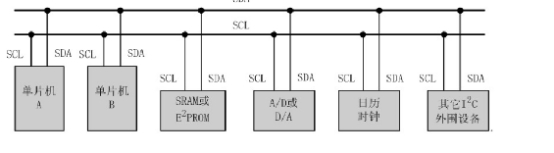
图3.1 I2C通讯原理
3.2单片机的数据处理
当单片机读取到串口中的信号时,反馈给一个引脚高/低电平的数字信号,从而实现数据间的处理。
3.3操作界面的设计与数据显示
其操作界面可以通过自己支座贴图的方式,同时给予触摸位置按钮开关的命令,实现在满足界面的条件下,对外部设备的控制与显示的作用。如图所示:

图3.2界面
在考虑有没有下注的情况下,进行不同的反馈。同时给予一定的动画效果,让其看上去更加真实。具体效果如图所示:


图3.3效果展示
4. 工作特色及其难点
4.1工作特色
传输速度快,Arduino开发资源成熟,数据简单,处理速度快。采用C语言的编程,操作简单,易上手。
4.2技术难点
手势识别距离太短,其次是不能解决误操作。
5. 论文工作量及其预期进度
2018年12月20日-2019年1月10日:熟悉论文课题,查找资料,研究资料,熟悉编程语言。
2019年1月11日-2019年1月19日:确定设计系统总体方案,书写开题报告,准备开题报告答辩。
2019年2月-2019年3月1日:购买材料,完成单片机与手势识别传感器的识别,能读出数据,并将数据处理并作为输出信号控制输出设备。
2019年3月-2019年4月1日:完成单片机与触摸屏的通讯,并且能够显示数据,完成显示屏界面设计。
2019年4月-2019年4月15日:撰写毕业设计论文。
2019年4月15日-2019年5月:修改论文并优化系统。
2019年5月-2019年6月,提交毕业论文初稿,根据指导老师的建议,继续完善系统,将完成的系统上交,并将修改后的毕业论文完成上交,准备毕业设计论文答辩。
6. 预期成果
1) 实现系统功能;
2) 优美的操作界面;
3) 控制的无差错。
参考文献
[1] 刘天宋,高学群,虞益龙,熊家慧.使用弯曲传感器的机器人手势控制系统设计[J].技术纵横:,2
https://baike.baidu.com/item/手势识别/12629655
