目录
1故事的开始 1
1.1设计背景与灵感来源 1
1.2基本分工设计与器材准备 1
2硬件设计与硬件驱动编写测试 2
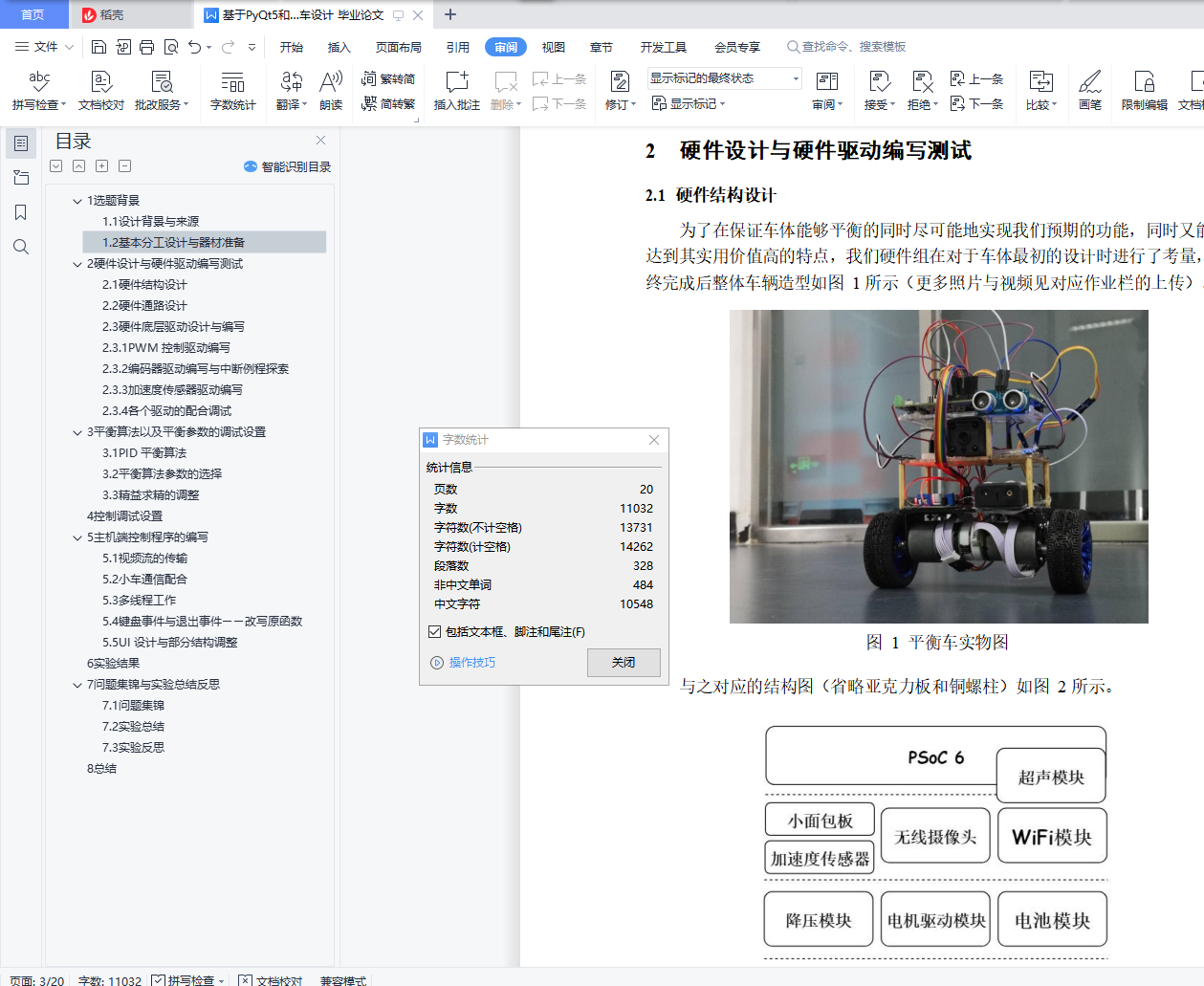
2.1硬件结构设计 2
2.2硬件通路设计 3
2.3硬件底层驱动设计与编写 4
2.3.1PWM 控制驱动编写 4
2.3.2编码器驱动编写与中断例程探索 5
2.3.3加速度传感器驱动编写 7
2.3.4各个驱动的配合调试 7
3平衡算法以及平衡参数的调试设置 8
3.1PID 平衡算法 8
3.2平衡算法参数的选择 8
3.3精益求精的调整 10
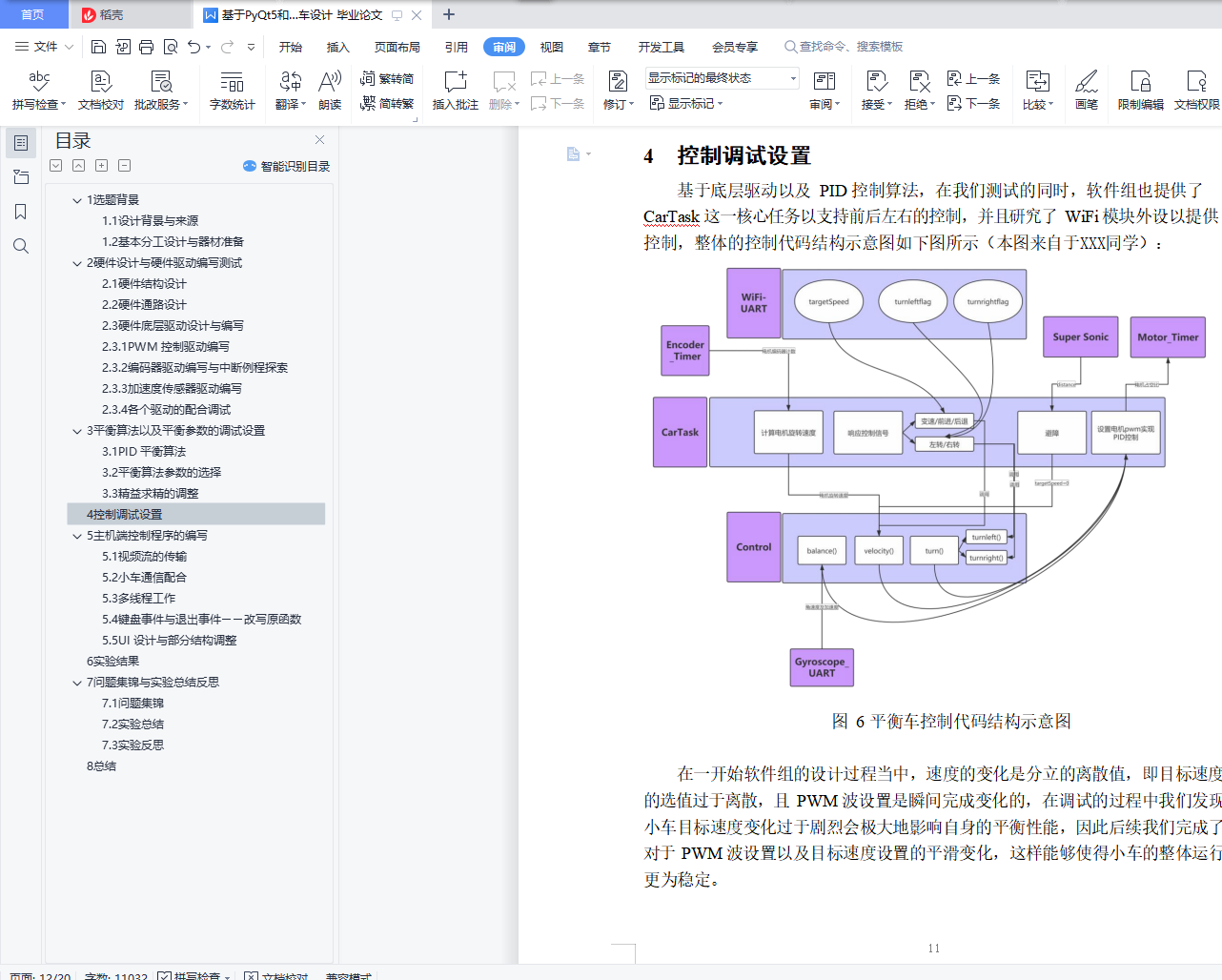
4控制调试设置 11
5主机端控制程序的编写 12
5.1视频流的传输 13
5.2小车通信配合 13
5.3多线程工作 14
5.4键盘事件与退出事件――改写原函数 15
5.5UI 设计与部分结构调整 16
6实验结果 16
7问题集锦与实验总结反思 17
7.1问题集锦 17
7.2实验总结 18
7.3实验反思 19
8 总结 19
1选题背景
1.1设计背景与来源
时至今日,越来越多的智能无人系统进入我们的视野。这其中,便有视觉冲击力极强的平衡车。无论是日常载人的平衡车,还是例如在机场、餐厅中看到的那些已经被投入使用的平衡车,其独特而具有视觉美感的造型设计以及相比于四轮车的低功耗、便捷等特性已经逐渐被大众所接纳,也有望在未来占有相当可观的市场份额。
与此同时,组内成员对于平衡车的构造、平衡原理、运动控制等内容都极为感兴趣,在进行一系列的项目评估以及头脑风暴后,我们一致认为这是一个可行的选题,因此有了最后作为成品出现在验收现场的基于 PSoC6 的多功能平衡车。

OOKOWM`3C_2MB.png)