摘 要
随着农业现代化的发展和农业产业结构的调整,无人耕种机得到快速发展,其机械性能也越来越受到人们的关注。无人耕种机在工作时由于各种原因不可避免地会出现漏播现象,无法确保精播质量。为了提高无人耕种机的工作质量和智能化水平,本次设计智能大棚导轨式无人耕种系统在大棚里实现无人化耕种。
本次大棚导轨式无人耕种机控制系统采用ATMEGA128单片机作为主芯片。单片机先对增量式编码盘采集的信号进行分析处理得到机具的速度,然后根据所建立的数学模型,通过算法编程控制伺服电机的转速来实现智能耕种,其中为了精准耕种还设计两个反馈系统:伺服电机转速的反馈和实际耕种量的反馈。具有自动行驶、自动耕地、自动耕种、检测障碍物、防撞的功能。该平台应具有智能化、小型化、经济实用等特点。
关键词:智能大棚;无人耕种;导轨式;控制系统;单片机
Abstract
With the development of agricultural modernization and the adjustment of agricultural industrial structure, the unmanned farming machine has been developed rapidly, and its mechanical properties have attracted more and more attention. Unmanned farming machine in the work due to various reasons will inevitably appear leakage phenomenon, can not ensure the quality of fine sowing. In order to improve the working quality and intelligent level of unmanned farming machine, this design of intelligent greenhouse guide rail unmanned farming system in the greenhouse to achieve unmanned farming.
ATMEGA128 single chip is used as the main chip in the control system of the guide rail type unmanned farming machine in the greenhouse. The single chip microcomputer first analyzes and processes the signal collected by the incremental coding disk to obtain the speed of the machine, and then according to the established mathematical model, the speed of servo motor is controlled by algorithm programming to realize intelligent seeding. Two feedback systems are designed for accurate seeding: servo motor speed feedback and actual seeding feedback. It has the functions of automatic driving, automatic cultivated land, automatic sowing, detecting obstacles and collision prevention. The platform should be intelligent, miniaturized, economical and practical.
Keywords: Intelligent shed; Unmanned farming; Guide rail type; Control system; Single chip microcomputer
目 录
摘 要
Abstract
第1章 绪论
1.1选题背景及意义
1.2国内外发展现状
1.3发展趋势
1.4研究主要内容
第2章 总体设计
2.1耕种机类型
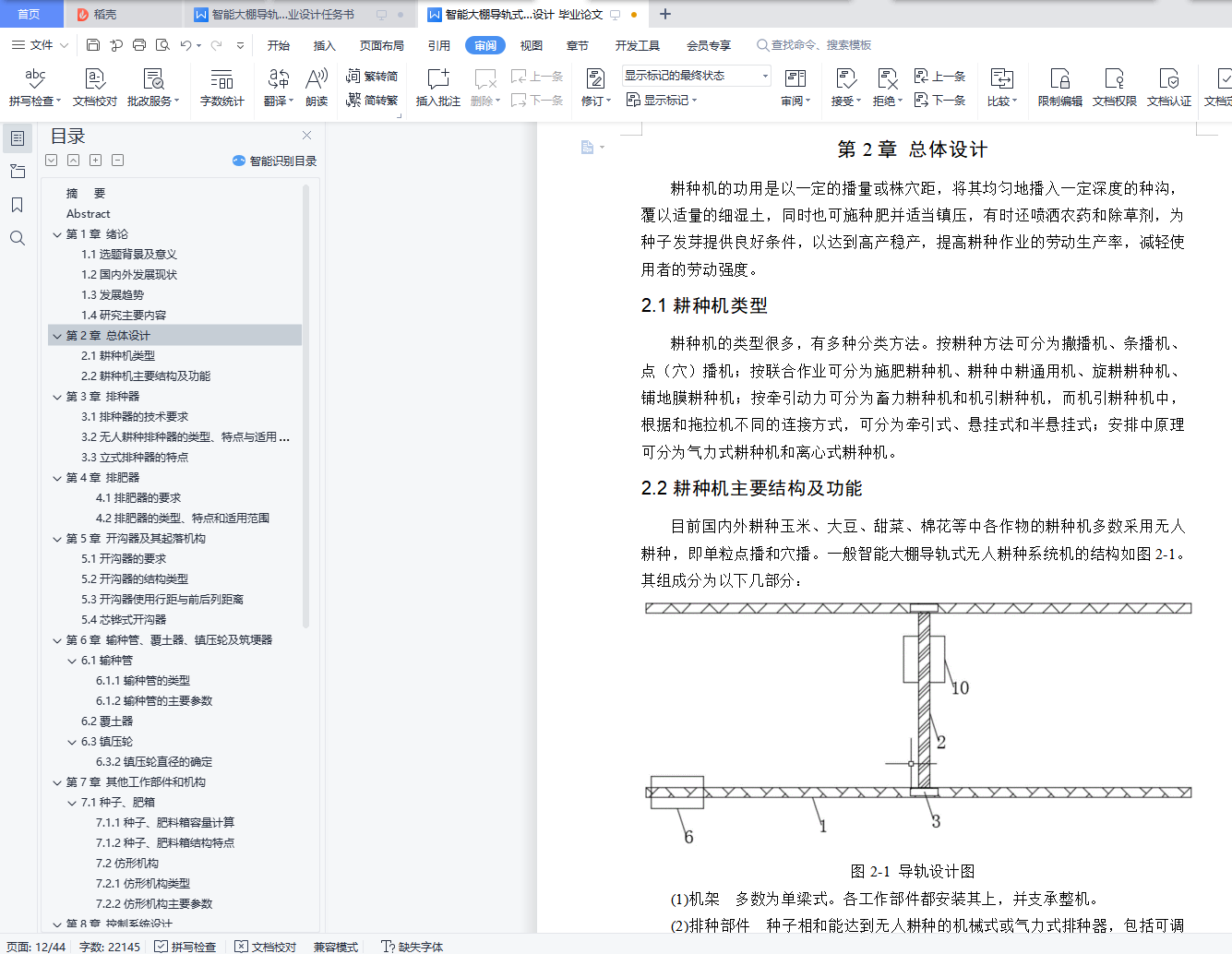
2.2耕种机主要结构及功能
第3章 排种器
3.1排种器的技术要求
3.2无人耕种排种器的类型、特点与适用范围
3.3立式排种器的特点
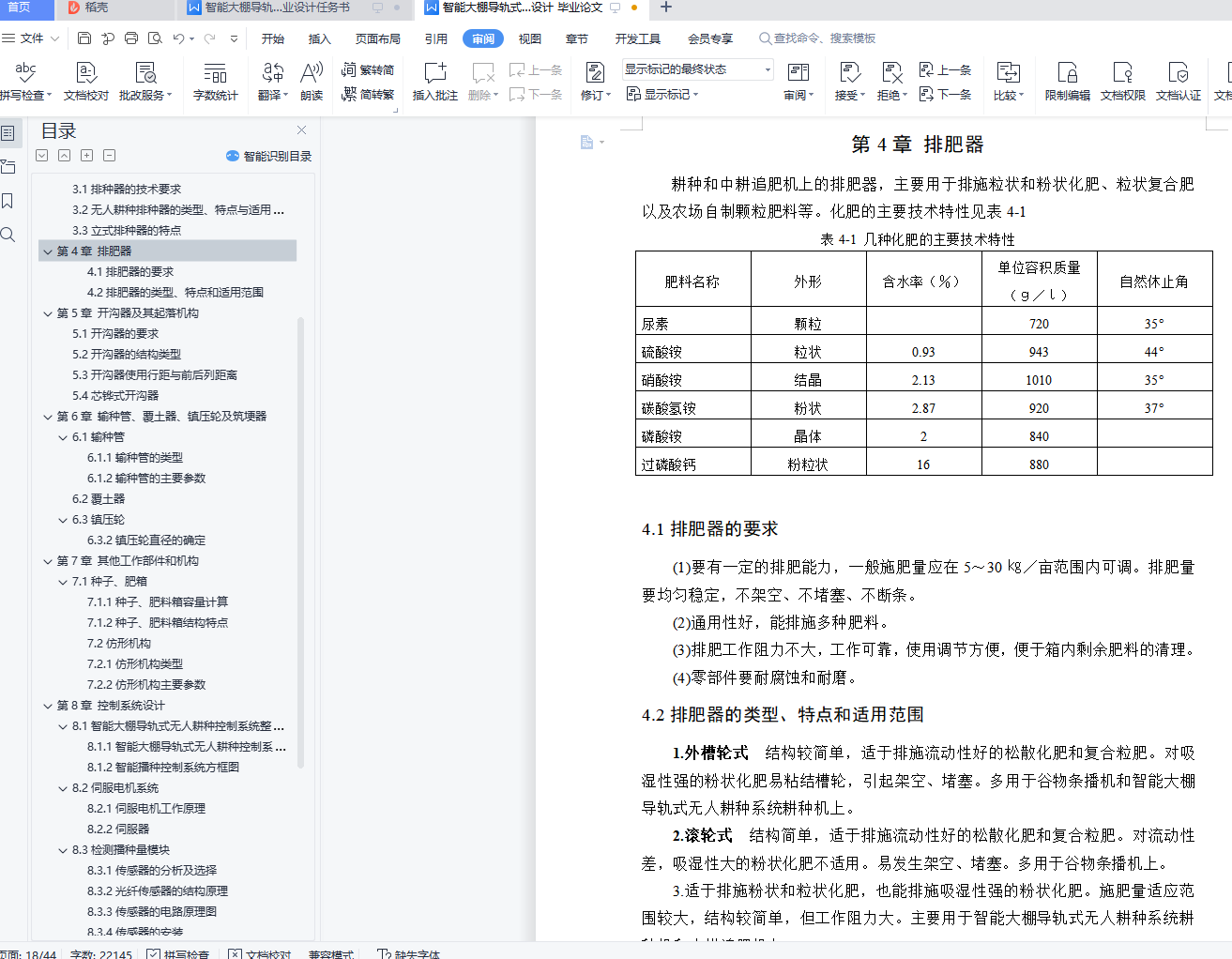
第4章 排肥器
4.1排肥器的要求
4.2排肥器的类型、特点和适用范围
第5章 开沟器及其起落机构
5.1开沟器的要求
5.2开沟器的结构类型
5.3开沟器使用行距与前后列距离
5.4芯铧式开沟器
第6章 输种管、覆土器、镇压轮及筑埂器
6.1输种管
6.1.1输种管的类型
6.1.2输种管的主要参数
6.2覆土器
6.3镇压轮
6.3.2镇压轮直径的确定
第7章 其他工作部件和机构
7.1种子、肥箱
7.1.1种子、肥料箱容量计算
7.1.2种子、肥料箱结构特点
7.2仿形机构
7.2.1仿形机构类型
7.2.2仿形机构主要参数
第8章 控制系统设计
8.1智能大棚导轨式无人耕种控制系统整体方案
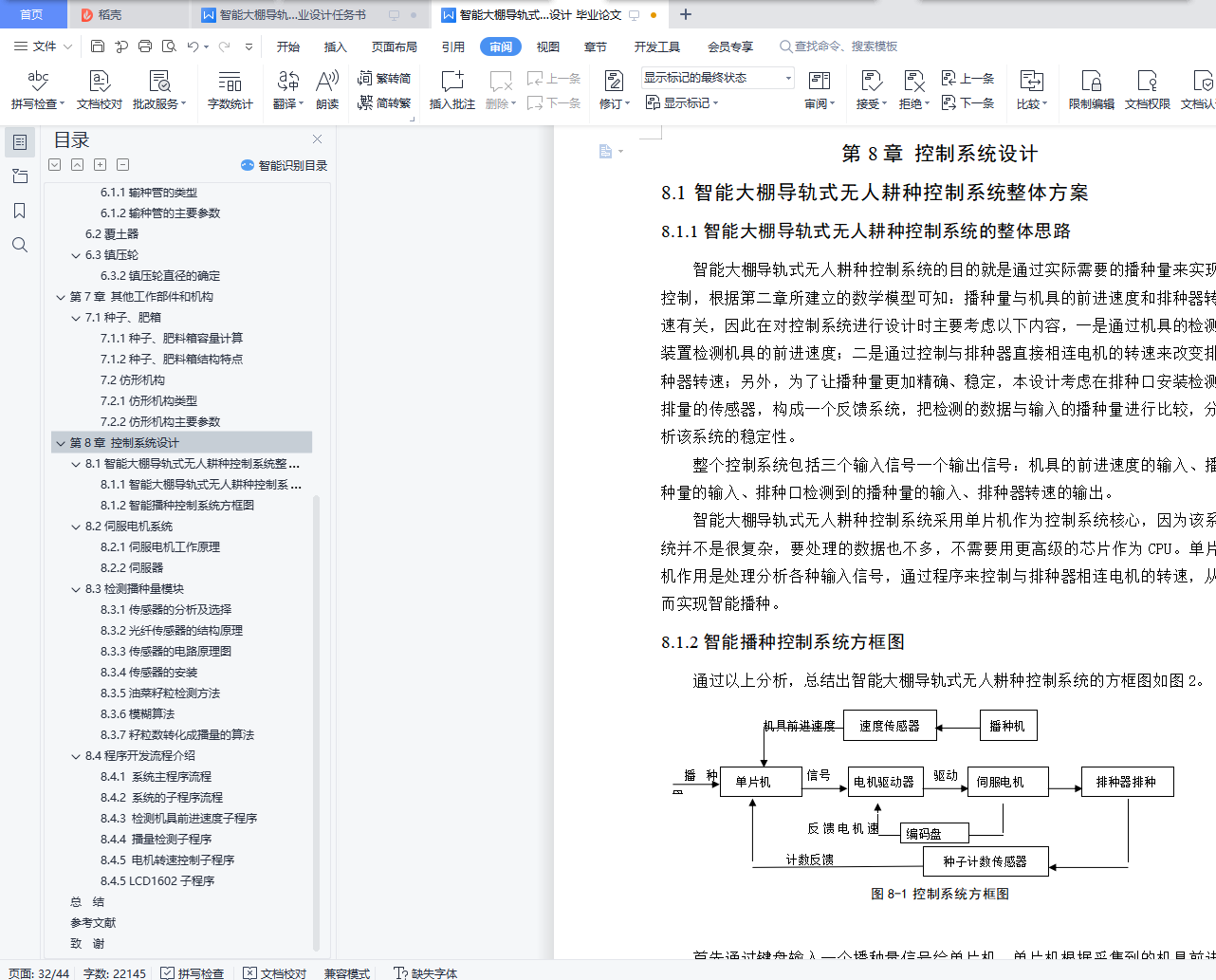
8.1.1智能大棚导轨式无人耕种控制系统的整体思路
8.1.2智能播种控制系统方框图
8.2伺服电机系统
8.2.1伺服电机工作原理
8.2.2伺服器
8.3检测播种量模块
8.3.1传感器的分析及选择
8.3.2光纤传感器的结构原理
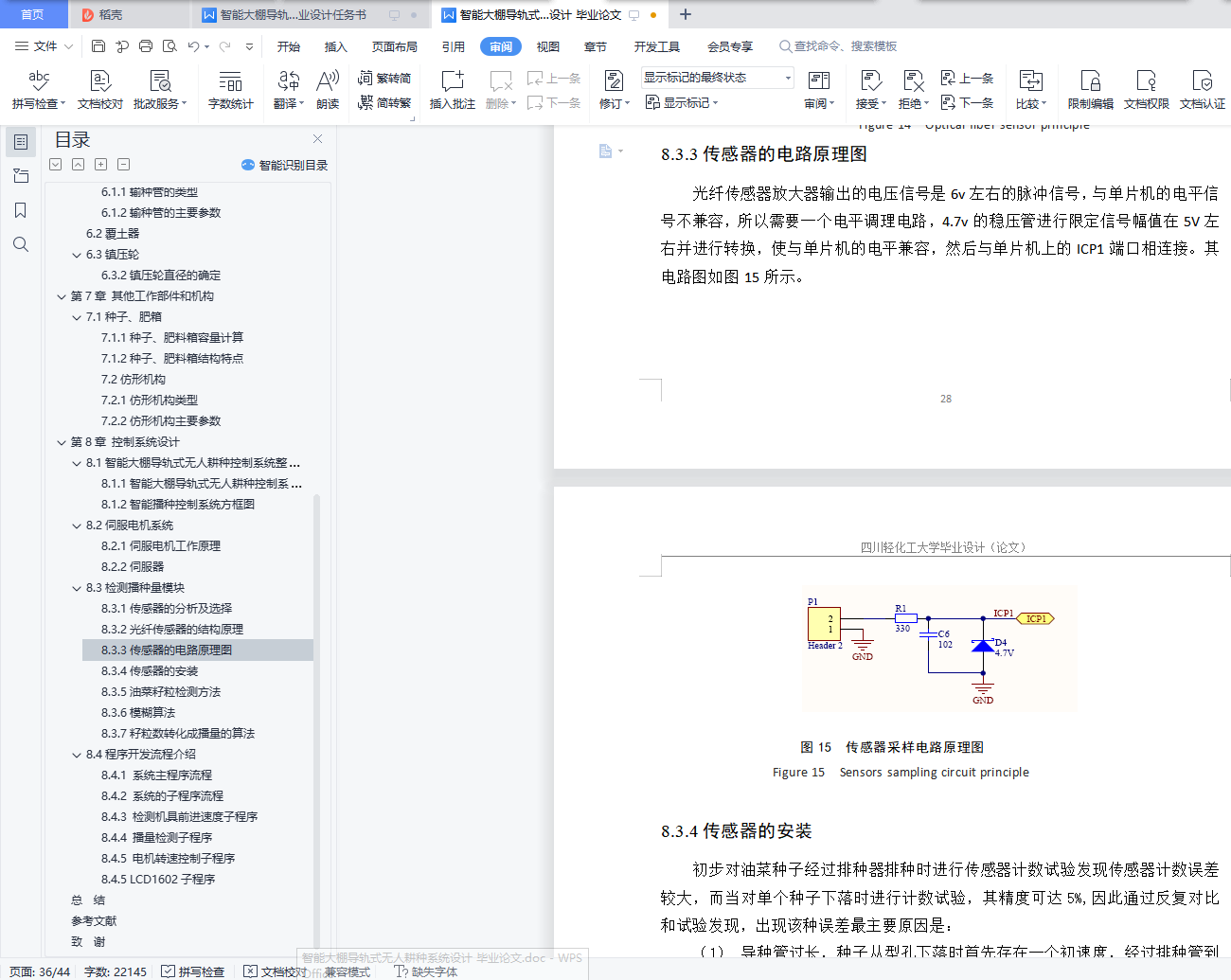
8.3.3传感器的电路原理图
8.3.4传感器的安装
8.3.5油菜籽粒检测方法
8.3.6模糊算法
8.3.7籽粒数转化成播量的算法
8.4程序开发流程介绍
8.4.1 系统主程序流程
8.4.2 系统的子程序流程
8.4.3 检测机具前进速度子程序
8.4.4 播量检测子程序
8.4.5 电机转速控制子程序
8.4.5 LCD1602子程序
总 结
参考文献
致 谢