摘 要
针对批量加工无缝管内孔人工的上下料问题,设计一种经济型自动上下料机构,有效提高了生产自动化程度,这种新型的自动化操作装置,它可模仿人的手部动作,根据作业要求,按照预先确定的程序、轨迹通过液压系统实现抓取和搬运操作完成一定的作业。
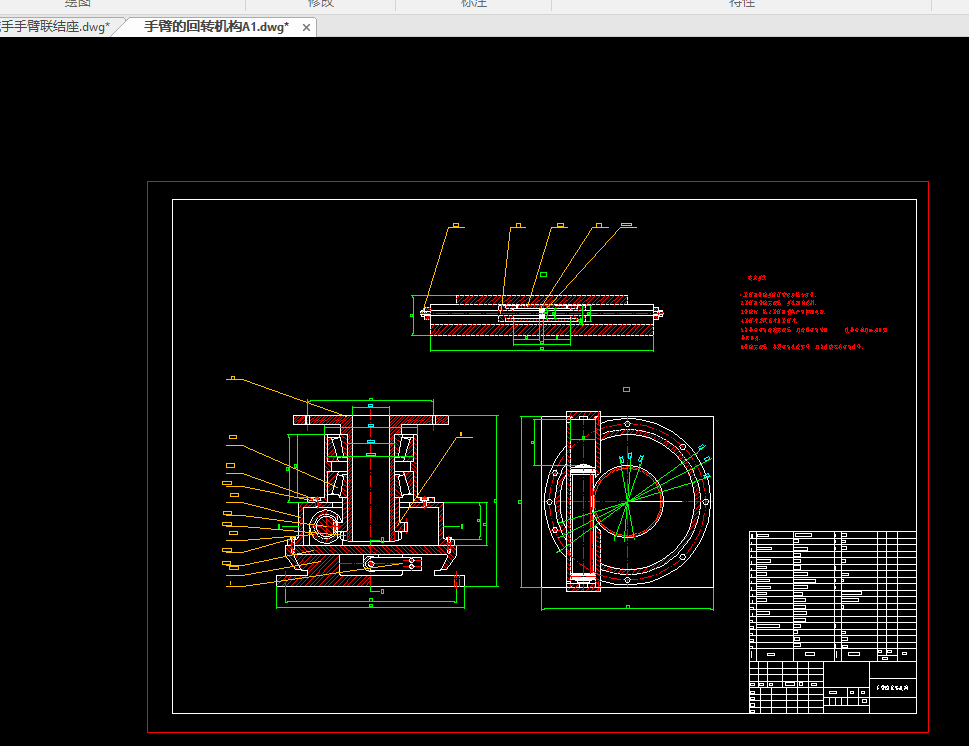
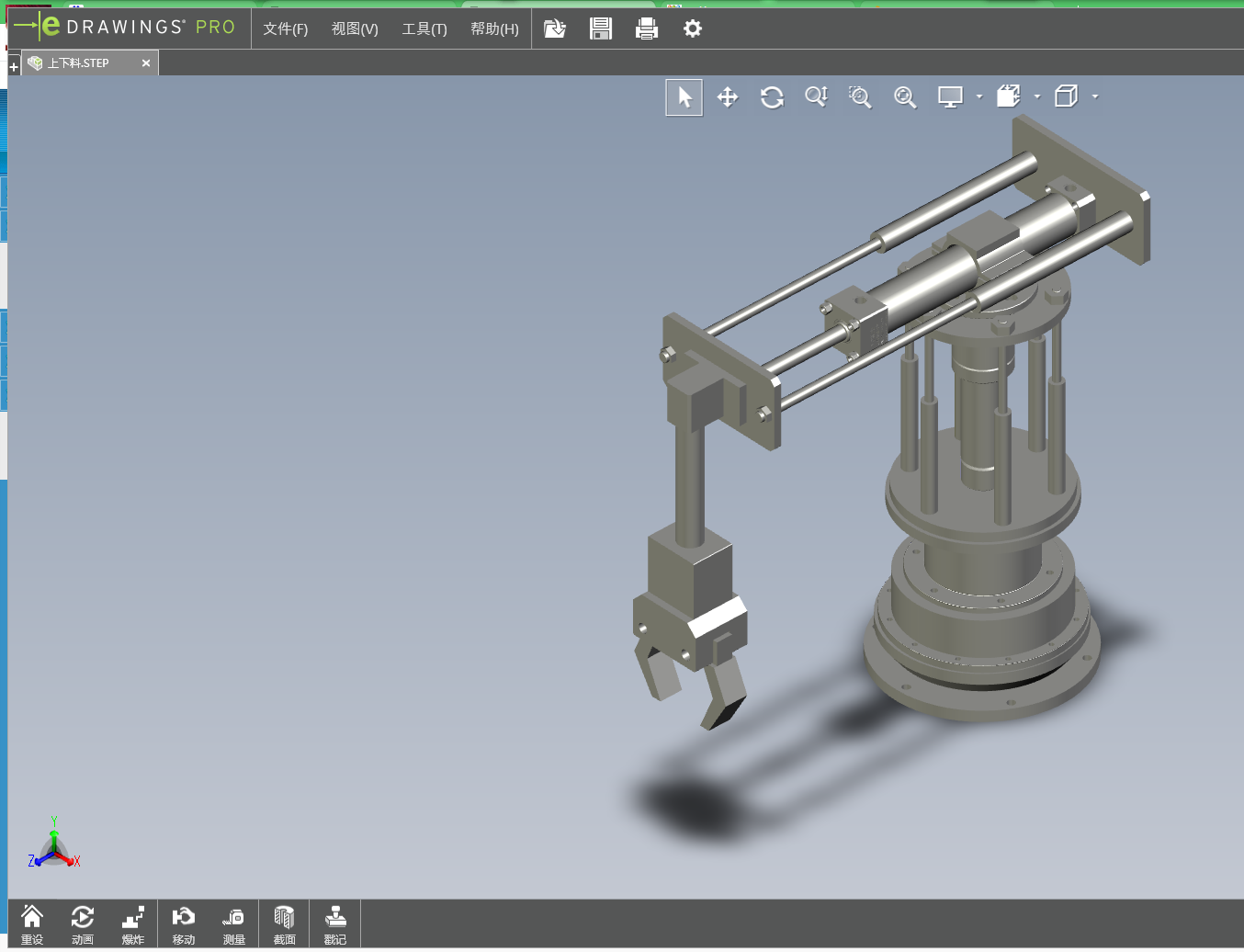
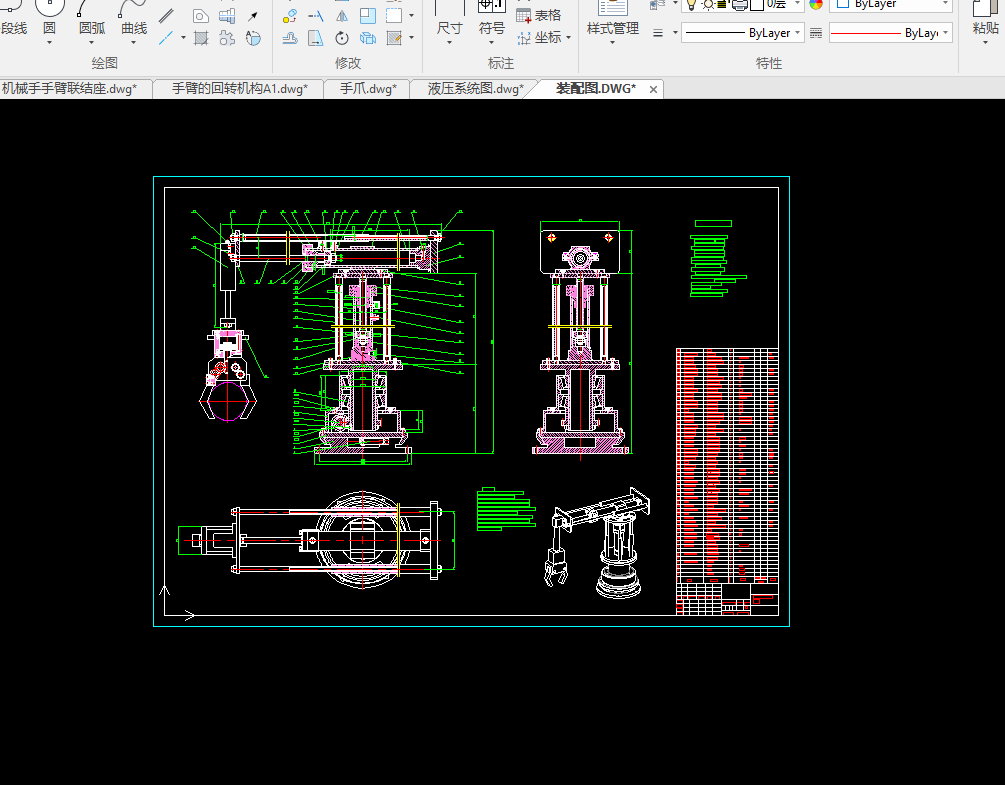
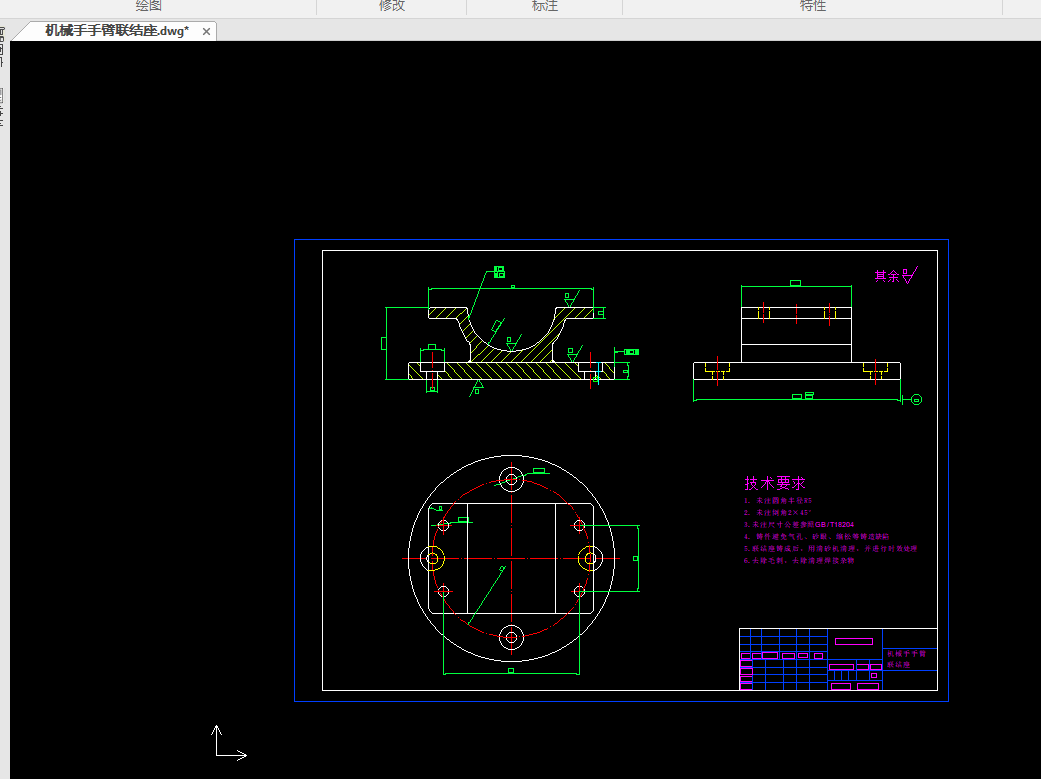
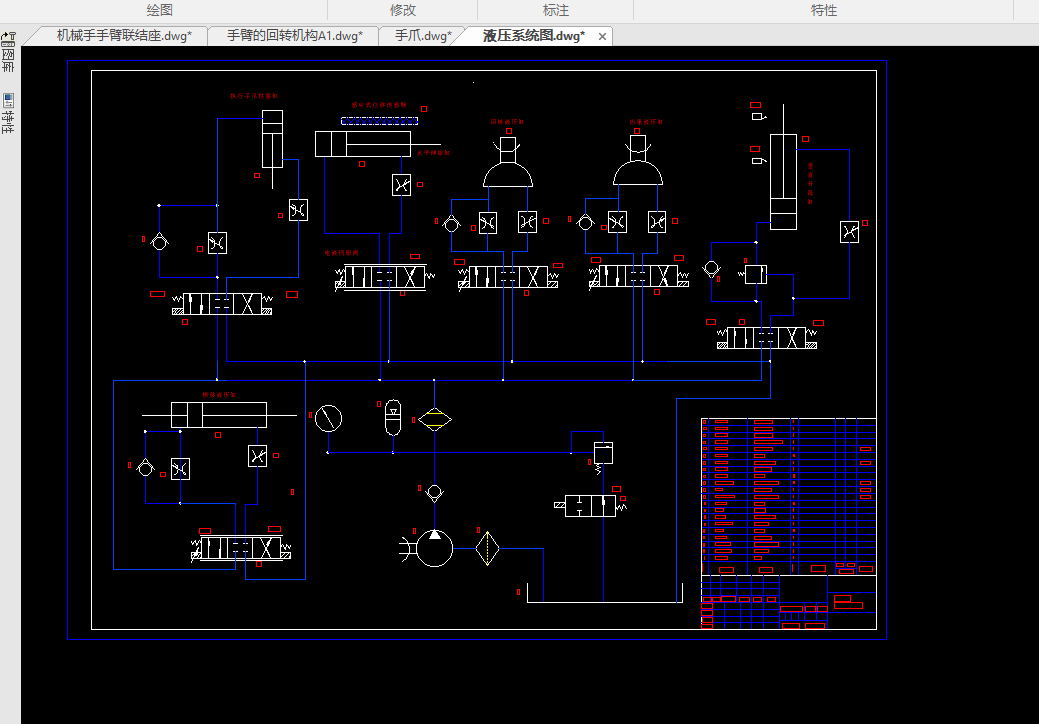
本次设计的四自由度自动上下料机构根据规定的动作顺序,综合运用所学的基本理论、基本知识和相关的机械设计专业知识,完成对机械手的设计,并绘制必要装配图、液压系统图、。机械手的机械结构采用油缸、螺杆、导向筒等机械器件组成;在液压传动机构中,机械手的手臂伸缩采用伸缩油缸,手腕回转采用回转油缸,立柱的转动采用齿条油缸,机械手的升降采用升降油缸,立柱的横移采用横向移动油缸;通过控制电磁阀的开关来控制机械手进行相应的动作循环,当按下连续停止按钮后,自动上下料机械手在完成一个动作循环后停止运动。
关键词:机械手;液压;控制回路;自动上下料
ABSTRACT
In order to solve the problem of the upper and lower materials in the seamless tube, an economical automatic upper and lower materials mechanism is designed, which effectively improves the degree of production automation. This new type of automatic operation device can imitate human hands according to the operation requirements. According to the pre-determined procedures and tracks through the hydraulic system to achieve the capture and handling operation to complete certain operations.
This design of the four-degree-of-freedom automatic up and down material mechanism according to the specified action order, using the basic theory, basic knowledge and related mechanical design expertise, complete the design of the manipulator, and draw the necessary assembly diagram, hydraulic system diagram,. The mechanical structure of the manipulator is composed of cylinder, screw, guide cylinder and other mechanical devices; In the hydraulic transmission mechanism, the manipulator's arm is telescopic with a retractable oil cylinder, the wrist is rotated with a rotary oil cylinder, the vertical column is rotated with a rack oil cylinder, the manipulator is lifted with a lifting oil cylinder, and the vertical column is moved horizontally with a lateral moving oil cylinder; By controlling the switch of the solenoid valve, the manipulator is controlled to carry out the corresponding action cycle. When the continuous stop button is pressed, the manipulator automatically stops moving after completing an action cycle.
Key words: Mechanic hand; Hydraulic pressure; Control loop; Automatic Up and Down
目 录
摘 要
ABSTRACT
第一章 绪论
1.1自动上下料机现状
1.2设计目的
1.3 国内外研究方向
1.4 设计原则
第二章 自动上下料机械手方案设计
2.1自动上下料机械手的总体设计
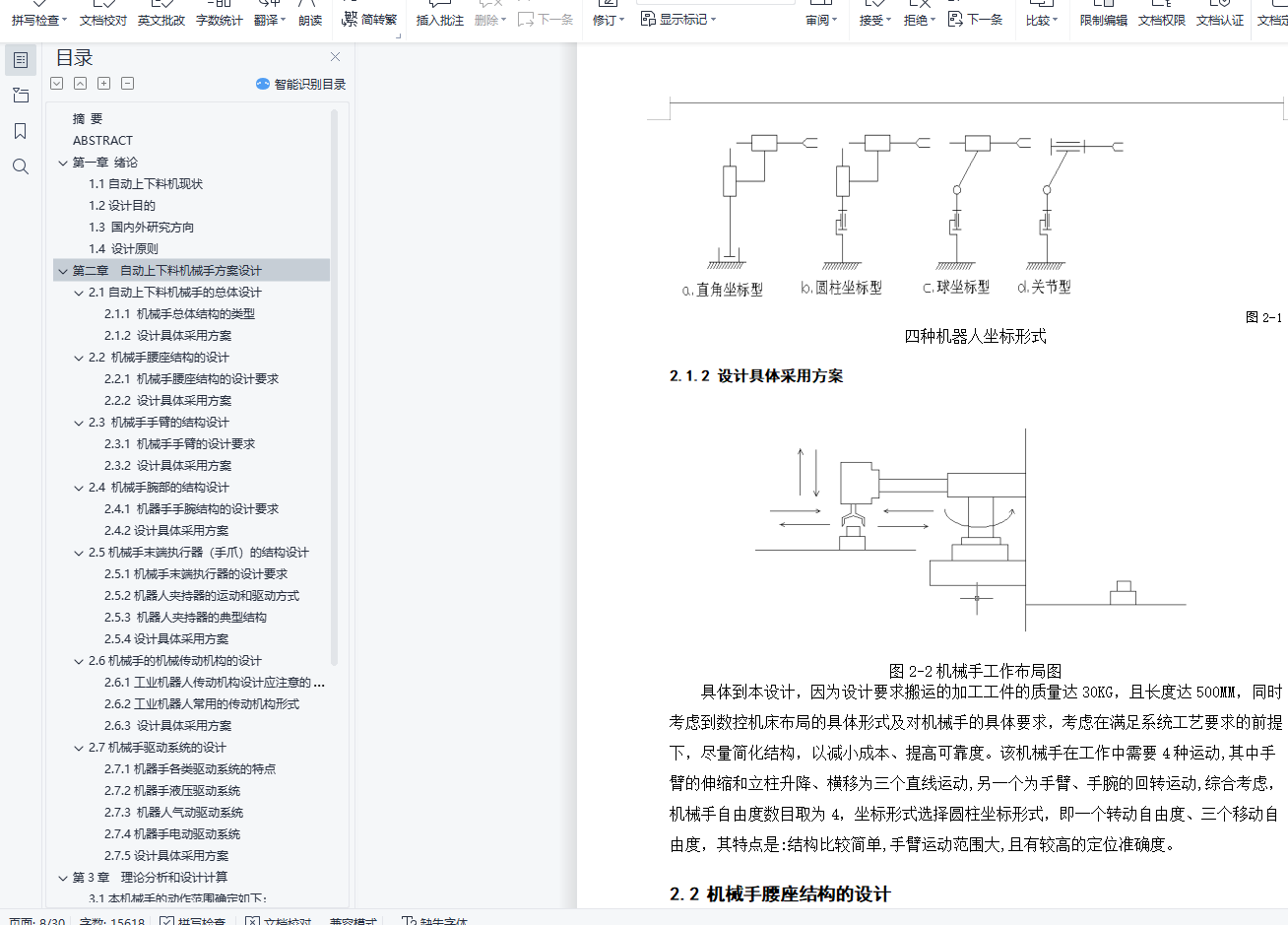
2.1.1 机械手总体结构的类型
2.1.2 设计具体采用方案
2.2 机械手腰座结构的设计
2.2.1 机械手腰座结构的设计要求
2.2.2 设计具体采用方案
2.3 机械手手臂的结构设计
2.3.1 机械手手臂的设计要求
2.3.2 设计具体采用方案
2.4 机械手腕部的结构设计
2.4.1 机器手手腕结构的设计要求
2.4.2设计具体采用方案
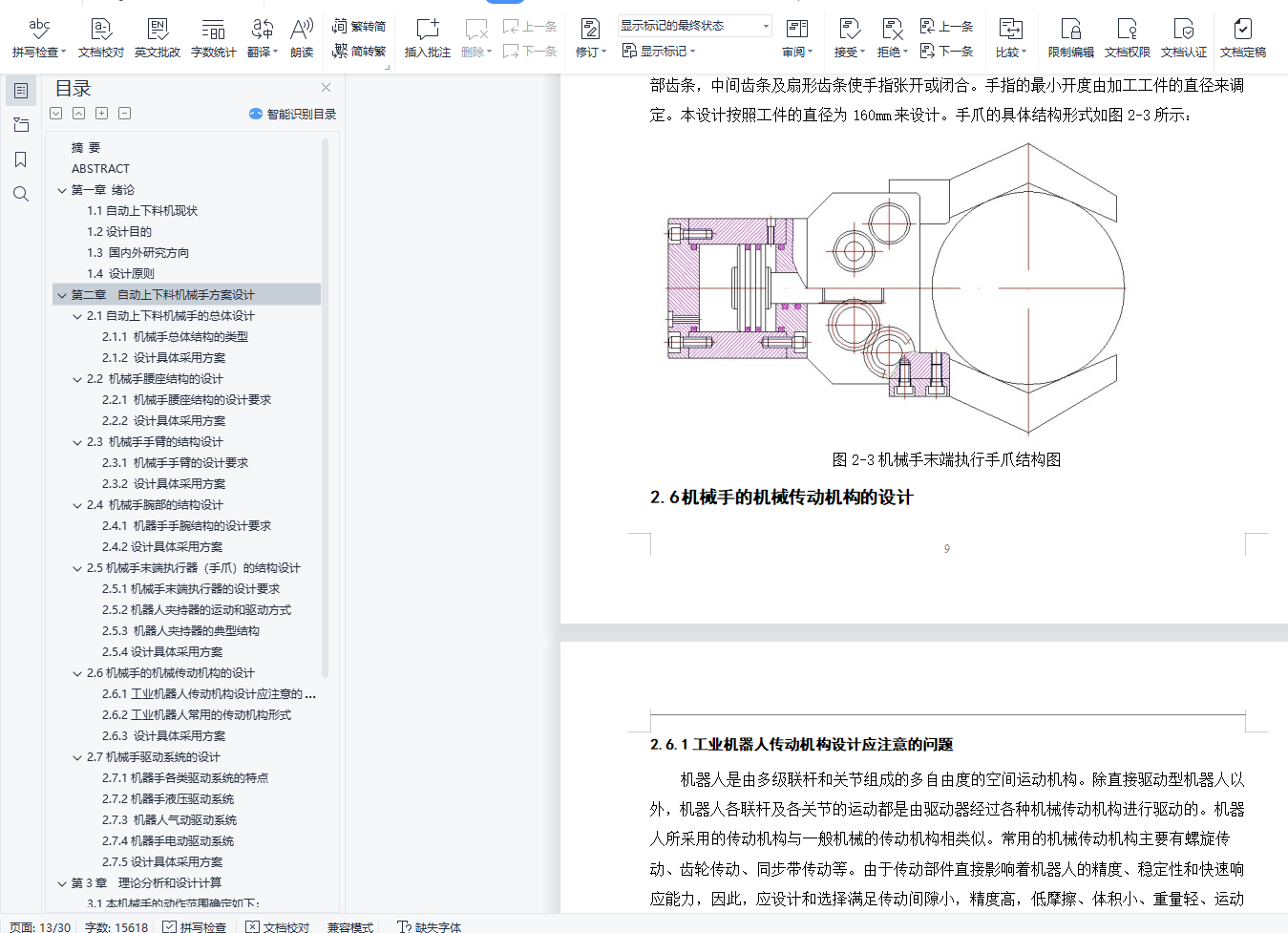
2.5机械手末端执行器(手爪)的结构设计
2.5.1机械手末端执行器的设计要求
2.5.2机器人夹持器的运动和驱动方式
2.5.3 机器人夹持器的典型结构
2.5.4设计具体采用方案
2.6机械手的机械传动机构的设计
2.6.1工业机器人传动机构设计应注意的问题
2.6.2工业机器人常用的传动机构形式
2.6.3 设计具体采用方案
2.7机械手驱动系统的设计
2.7.1机器手各类驱动系统的特点
2.7.2机器手液压驱动系统
2.7.3 机器人气动驱动系统
2.7.4机器手电动驱动系统
2.7.5设计具体采用方案
第3章 理论分析和设计计算
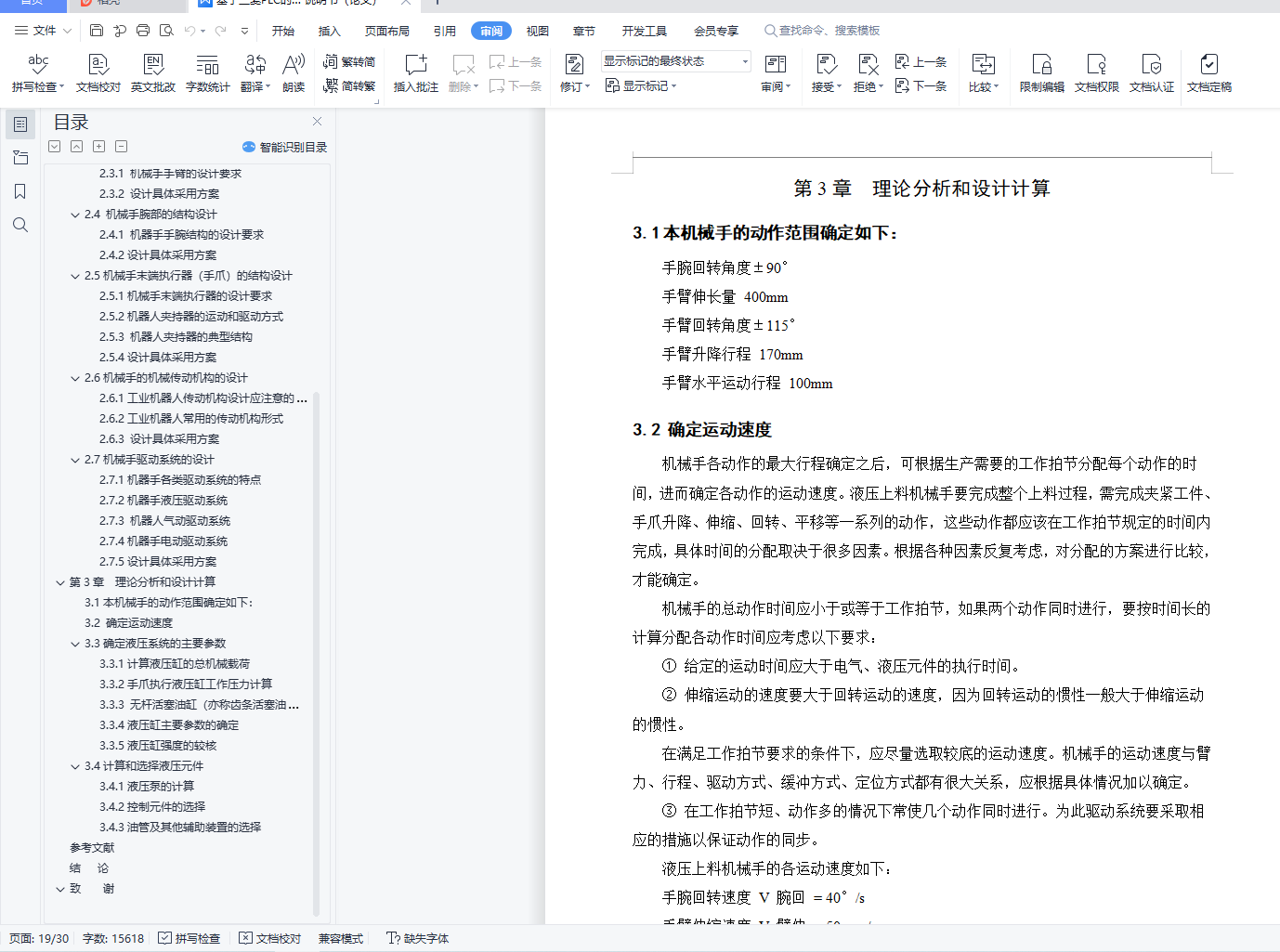
3.1本机械手的动作范围确定如下:
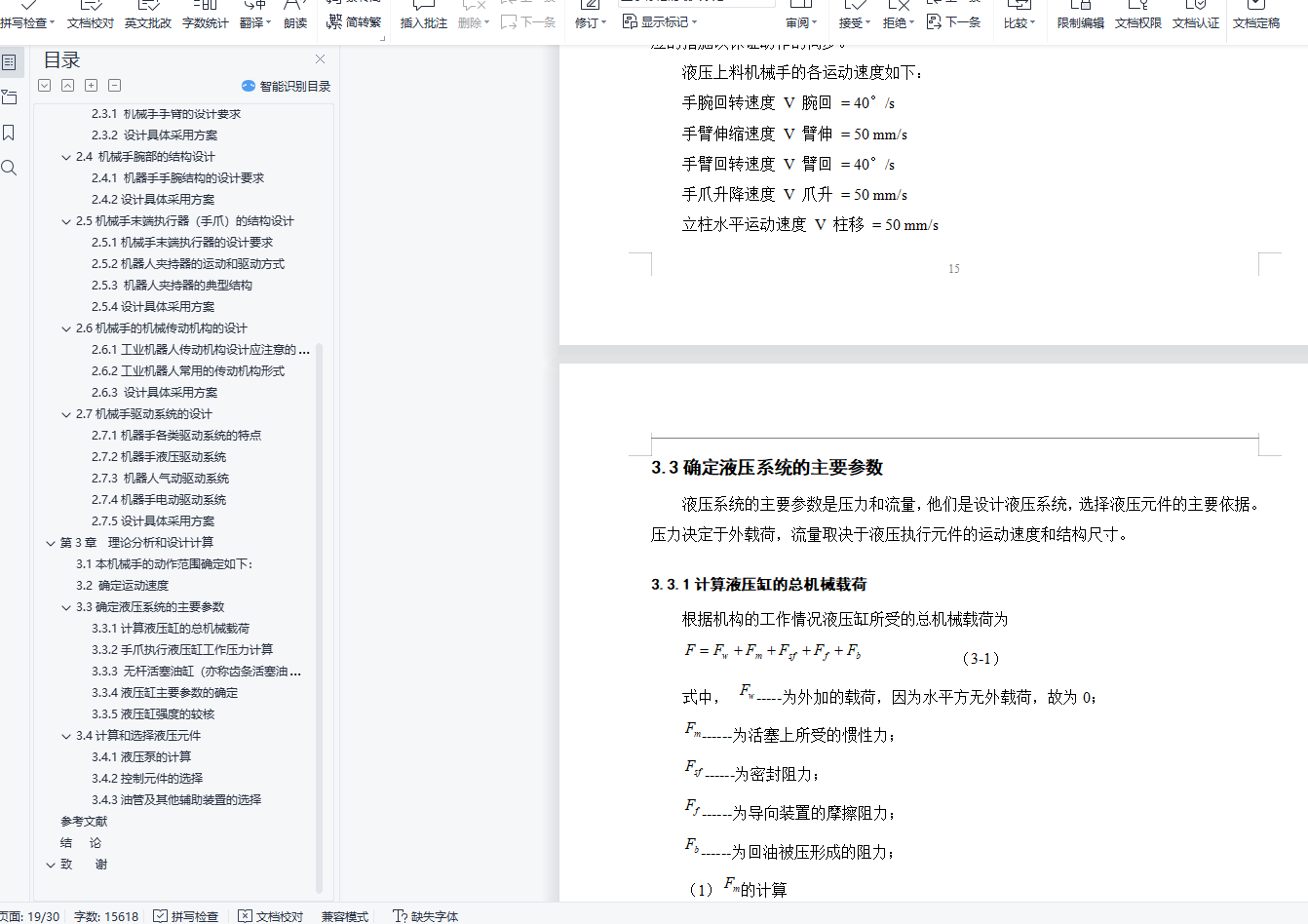
3.2 确定运动速度
3.3确定液压系统的主要参数
3.3.1计算液压缸的总机械载荷
3.3.2手爪执行液压缸工作压力计算
3.3.3 无杆活塞油缸(亦称齿条活塞油缸)
3.3.4液压缸主要参数的确定
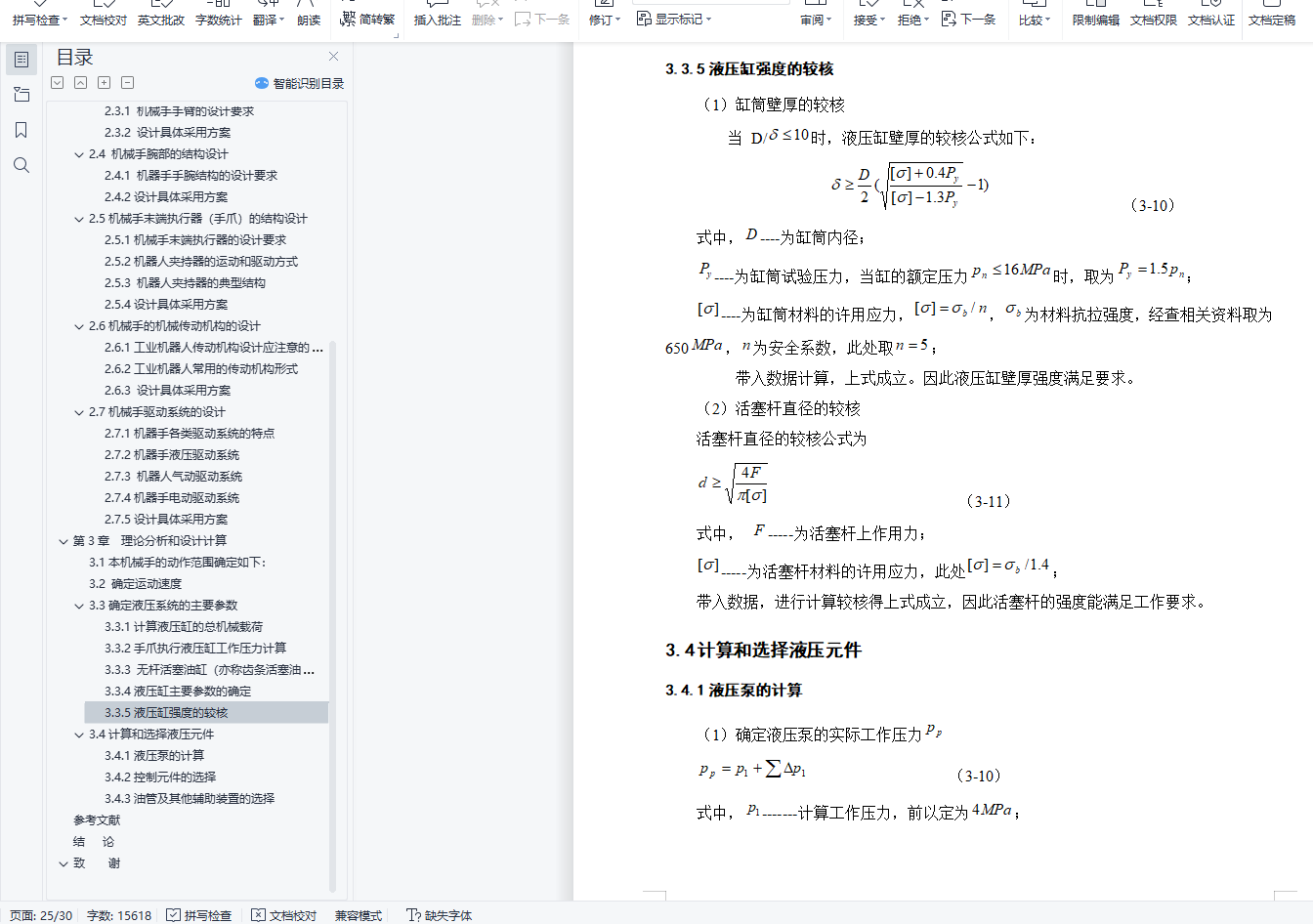
3.3.5液压缸强度的较核
3.4计算和选择液压元件
3.4.1液压泵的计算
3.4.2控制元件的选择
3.4.3油管及其他辅助装置的选择
参考文献
结 论
致 谢