摘 要
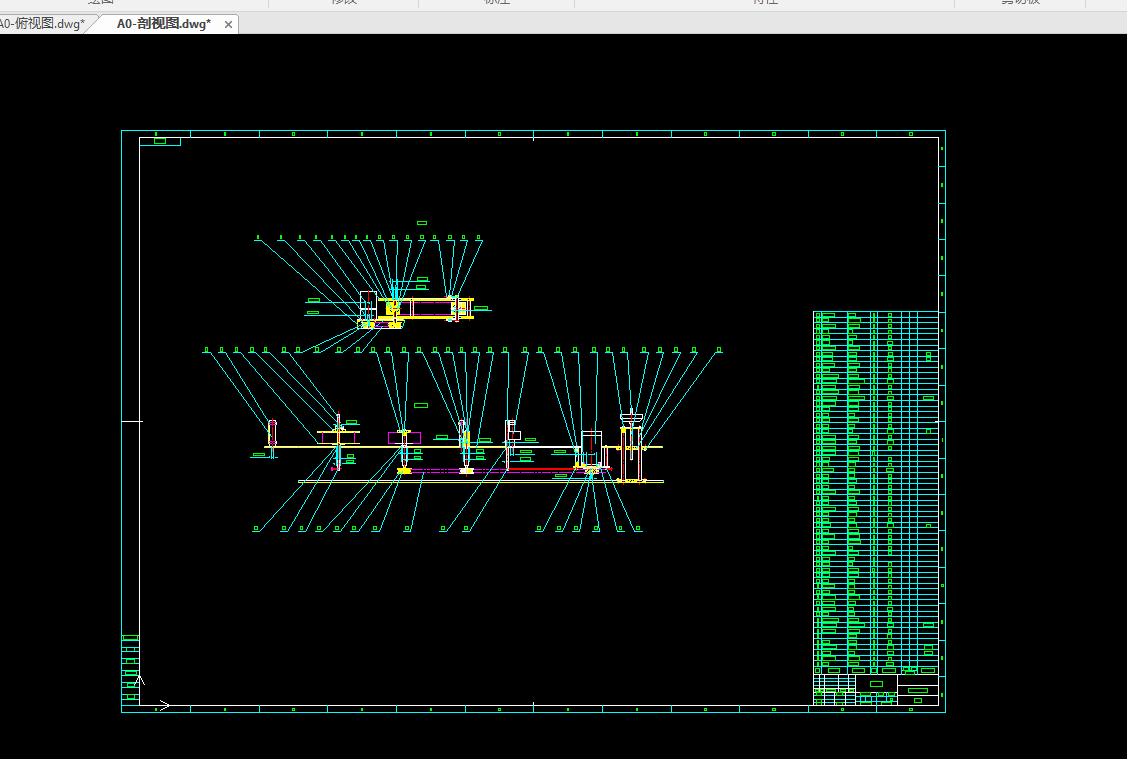
根据分针制剂药瓶的特点及外形尺寸设计适用于生产线中的全自动贴标机。本贴标机主要采用电机提供整个机构所需的动能,然后主要通过齿轮与齿轮之间的啮合将动能传递机构的各个部分,在一些特殊的位置也需要靠带来传递动能。本次设计的贴标机是采用刷胶贴标的方法,由真空吸鼓从表盒中将标签取出并送到刷胶位置,在无胶标签上刷上胶以后再由真空吸鼓吸附标签将标签送到贴标位置。瓶子的输送先是由带传动实现,送到进瓶星轮后,再由进瓶星轮将瓶子拨到托瓶回转圆盘上。通过与托瓶回转圆盘的同心转动将瓶子送到贴标位置,同时标签也送到此位置,进行贴标。在完成贴标后,瓶子随托瓶回转圆盘继续同心转动,送到出瓶星轮位置,由出瓶星轮与导板配合将瓶子送到带上,最终由带把贴完标签的瓶子送出。
关键词:贴标机 原理 部件结构 计算 强度
Abstract
According to the ampule looked agents dimensions and characteristics applicable to the design of the production line of automatic labeling machine. The labeling machines used mainly for the electrical needs of the entire energy sector, Then the main gear with the gear through the meshing between the transfer of kinetic energy of each component in a special position also needs to rely on delivering energy. The design of the machine is labeling agglutinant-brushing workers labeling method by vacuum suction table from the dark box labels will be removed and sent to the location agglutinant-brushing workers, in the absence of plastic label on the plastic after brushing by vacuum suction drum adsorption labels will be sent to the label's labeling position. Bottles from the first conveyor belt drive to achieve, and sent into the Star Ferry bottle after bottle into by the Star Ferry will be asked to transfer bottle bottle rotating disks. Entrusted with a bottle of concentric rotating disc rotation will be sent to labeling bottles, while at the same time also to label this position for labeling. After the completion of labeling, bottles with child care continue to bottle concentric rotating disc rotation, and sent out a bottle-round position, by the bottle from the Star Ferry and guide plate with bottles to bring, and ultimately by the conveyor belts End label affixed to the bottles donated.
Keyword: labeler Principle Structural components Calculation Strength
目 录
摘要 I
Abstract II
第1章 绪论
1.1 贴标机的发展历程
1.2 自动贴标机的提出
1.3 自动贴标机的发展方向及设计目标
1.4 研究现状
1.5 自动贴标机的应用
1.6 可行性分析
第2章 设计和计算
2.1 技术要求
2.2 自由度计算
2.2.1 自由度的计算公式
2.2.2 空间自由度的计算
2.2.3 并联机构的正解和反解
2.2.4 速度和加速度分析
2.2.5 运动学约束
2.2.6 各构件尺寸计算
2.3 本章小结
第3章 各部件的结构设计
3.1 各部件的设计
3.1.1 球铰链的设计
3.1.2 万向铰链的设计
3.1.3 伸缩杆的设计
3.1.4 绝对光码盘的设计
3.2 本章小结
第4章 设计和校核
4.1 大行程并联机器人的尺寸设计
4.1.1 丝杠螺母副的设计
4.1.2 丝杠螺母副的校核
4.2 小行程并联机器人的尺寸设计
4.2.1 丝杠螺母副的设计
4.2.2 丝杠螺母副的校核
4.3 本章小结
结论
致谢
参考文献