��轲�ժ��е�����
ժҪ��������ѿ�С��ľ��轵ij����ʵ�������ҩʳͬԴ���dz��������������ҩ�ģ����ӻ�˥�ϵĹ�Ч��������к��ж��ְ����ᣬ�����ص�Ӫ���ɷ֣�ʹ����б�����Ч���ܵ������ߵ��������������ʵС��ˮ�ִ���������ص㣬ѡ�����˹���ժΪ���������������ص㣬ʹ��ģ���˹���ժ�ķ�ʽ��ʹ��˫��е����ϲ�ժ����ʵ�ֻ�е�ֲ�ժ��轵Ĺ��ܡ��ڲ�������轵�����£����̶ȵĽ���Ͷ���������ũ����Ͷ�ǿ�ȣ����Ͳ�ժ�ɱ���
�ؼ��ʣ���轣���е�ۣ���ժ
1 ѡ�ⱳ����������
������ѿ�С��ľ��轵ij����ʵ�������ҩʳͬԴ���dz��������������ҩ�ģ����ӻ�˥�ϵĹ�Ч��������к��ж��ְ����ᣬ�����ص�Ӫ���ɷ֣�ʹ����б�����Ч���ܵ������ߵ�����������ѿ�������Ķ��֦��ľֲ����õ����л���轣�Lycium- chinenseMill.����������轣�Lycium barbarum L.���������֡������ֲ��ͨ��Ϊ�м��̻����̵Ĺ�ľ��������ҹ����ġ��ຣ���½������ɹŵȵؾ��д������ֲ����������г���ֵ������������������������ձ�ֲ�����������
����ҩ������������ܽᣬ2018�����ĵ�����轲�����6������ϣ��ຣ�����ܲ�����8������ϣ���������ܲ���5������ϣ��½�����1.5������ϣ����ɹŵ���4000�����ϣ��ӱ�����350-400 �֡����ع���ȫ��������22������ϡ�

ͼ1 ���
Ŀǰ�ҹ������ֲ�����100��Ķ���ϡ���Ȼ���ġ����ɹš��ຣ����������ֲ���û�����Եı仯��ȫ����轵IJ���ȴһ���һ�����ࡣ�����Ͷ����ļ��٣��˹���ժ�Ĵ�ͳ�������������֣���ժ�߷����˹�������������ս����ء�
��轹�ʵ�ֲ��������֦�·������˹���ժʱ�����˻Ὣ֦�����𣬲�ժ֦���������轡�������ժģ���˲�ժ�Ĺ��̡���������Ĺ���ģʽ���������̺��˶��滮����������е��߹���ժ�����˸����ӡ����е��߹���ժ�����˽����߹���ժʱ����ֱ�Ӳ�ժģʽ����ժ��ʵ��ֱ��ʶ��ץȡ��ʵ������轲�ժ�����˲�ժ������轣���ʶ��ץȡ��ȴ�����֦�����Ѷȸ����ڲ���轹�ʵʱ����е����Ҫһ���Ĺ����ռ䣬��轹�ʵ���������֦���棬����������֦��֮�䣬��е�����˶���Ҫ�����ܿ���Ҫʹ��ժ��˳�����У�������ʹ������ȷ��ʶ����轹�ʵ�����֦�����õ�Ҫץȡ���֦���Ŀռ�λ�ã�Ȼ��ͨ���ռ�����λ�úͻ�е��ʵ����轲�ժ��
2 ��ժ��е�ֵ��о���״
Ŀǰ�������з������IJ�ժ��е�ֱ���Ϊ�����࣬��һ������������ʽ�����ˣ������еװ�õ���Ҫ�ص��ǿ����������ߣ����ߵĹ����п��Խ�����Ӧ�Ĺ���[1]����һ�����������������ϵͳΪ�����Ͻ������Ƴɹ��ģ�����Ҫ�����Զ��������Զ����֡��Զ�ʩ�ʵ�ũҵ�������棻�ڶ���Ϊ����������ʽ�����ˣ���Ҫ��ˮ������ľ�ȷֲ��ȽϷ�ɢ�������Ƚ���ĸ���Ϊ����Ŀ�꣬��Щ��������Ҫ�м��̻����ˡ�����ӻ����ˡ����߲�ժ�����˵ȡ�������Щ�����˻����ܵ���������Ȼ��������������ʹ��Ч�ʽϵͣ��Ӷ�ʹũҵ�����ɱ���ӵ������ˡ����Ŀǰ����һ���������Ч�ʸ�Чũҵ��ժ�����ˡ���
�����о���״
����ѧ��Schertz��Brown[2]���״ΰѻ�е��Ӧ���ڹ��߲�ժ������
�����ձ��˿����仯�����������Ͼ��������ձ�ũҵ�Ͷ���Ҳ���ز��㣬������
���з��˷��Ѳ�ժ�����ˣ���Ԥ����2019����Ѯ��ʼ������[3]���ò�ժ�����˲��ø�������������ɼ���ʵͼ�Թ�ʵλ�ý��о�ȷ��λ����ժʱ���ֻ�����ֻ����ק���ѹ������ֶ����˺����۵Ĺ�ʵ��
������ij�о��������˻�����Э����˼���з���һ����ٲ�ժ�豸[4]��������ɲ��ְ�������������ܱ��豸��һ����е�֡���ѧ�Ӿ�ϵͳ�Ȳ��֣����Ĺ����ǰ��Ƿ���죬�ɲ����Բ�ժͨ�����ٵ���ɫ����״�ʹ�С�жϳ����Ĺ���Ч���e�ߣ�ƽ���ڷ��ӿ���ժ50�������˹�ÿ����ֻ��ժ10������Σ�ͨ��װ�й�ѧ�Ӿ�ϵͳ�Ļ�е�ֵĸ��ٲ�ժ�豸�����Բ�ժ�����ĸ��ٸ������С������Ӧ�ķ��ࡣ
������������ѧ�����˳��Ӳ�ժ��е�ֵ��о�[5]���ò�ժ�豸�Dz���������Զ������в�ͬ����ͬʱ����������Ļ�е�֣���һ����е�ָ���Ѱ�Һͷ��ָ�����ȵ�λ�ã�����������Ч�ʵIJ�ժ·��������Ϣ�����ݴ����ڶ�����е�֣��ڶ�����е�ָ����ڲ��������������µõ���ʵ������
Ӣ���¿˶Ź�˾�����������ֱۻ�е��[6]�����ֻ�е����һ���������Կ��۵�������ɡ����Ĺ���ԭ����ͨ�����ڲ����ڲ�����ѹ�仯��ץ�����Ӿ�ϵͳʶ��Ķ������ù����ܹ���Ч������������˹��Ͷ�����Լ������Դ�ͽ���ũ���ù��ɱ���������ѹ����Ϊ�á���������е���ֱ۵�Ψһ�������������ͨ���ڲ���ѹ�ı仯���ڻ���е�ֵĴ�Ĵָ������ָ�ؽڡ����ĺ����ֱ���������ӦĿ���������״���Ӷ�ʵ��ץȡĿ�������ֲ�����������ˡ�����Ŀǰ����������ʵ���������ܹ���ɡ���
���⣬ɽ��һ�ɵ��ձ�ľ����ũҵ�о����ĵļ��������ƻ��ժ������[7]���û��������Ĵ�ʽ����װ�á��������е�֡�ָ״ĩ��ִ�����ͻ����Ӿ�����ϵͳ��ɡ��������ֲ���Һѹ��������ժװ���·����й�ʵ�ռ�װ�ã����̲�ժ��ҵʱ�䣬������ջ��ٶȡ��ɹ���Ϊ43������ժ�ٶ�Ϊ55s/�����û�е�ֵ�ȱ�������ƹ�֦Ҷ���ɵ��ڵ�ƻ�����ϰ���ժȡƻ������
�����о���״
���߲�ժ��е���ڹ��ڵ��о���չ����в�С��ࡣ����
���մ�ѧ�Ե°��Ŷ����Ƶ�ƻ����ժ����豸����Ҫ���ƶ��������������ɽ�ȵĻ�е�������������[8]����е��ͨ��ÿ���ؽڵ�����װ�����������˿�������ʽ�ؽ��ͻ�е�֣���е�̶ֹ����Ĵ�ʽ�������ϣ����е��Ϊ�ĽṹΪPRRRP�ṹ����ժƻ���Ļ�е���ϰ�װ��ĩ�˲���������Ϊ�û�е�ֱ�����δ֪����ȷ���Լ��ǽṹ�ԵĻ����У���е�ֵIJ�ժ����Ҳ������ֲ��ģ���˰�װ�˺ܶ���ʽ�Ĵ�����������Ӧ�Ƚϸ��ӵĻ�������ժ��е��ʹ�ö��ִ����������У��Ӿ���������Ҫ��Ϊ��ʵ��ĩ�˲��������ժ����֮�����Ծ��룬��ժ�����Ƿ��ժ����״�Լ��ߴ����ص�����λ�ô�������Ҫ����װ�ڴ�ۡ�С����ת�ؽڴ��������Ȳ�λ�ģ�����������������������ʵ�ֶ���ת�ؽڵ���ת�Ľ�ȱ�ǶȺ�ֱ���ؽڵľ�ȷ��ֱ�о��룻���������͵Ĵ�������Ҫ�ɰ�װ��С���ϡ����ң�����ͬ����ģ������غͻ�е�ֱ۵ĺ�˵��������裬��������ʵ�����ڹ����������ܸ��õĶ���ϰ��
����ũҵ��ѧ��ѧ�����Ƶ���֦��ժ�Ļ�е��[9]�����ŵ��ǿ�Ӧ��������Ӿ�����Ҫ��ժ��ƻ�����ж�λ����ȡ��е�۵���Ұ��Χ�ڵ�ˮ����ΪĿ�꣬Ȼ��ͨ����ѧ�滮Ϊ��������ժ·������ʵ�������滮���ƶ���ĩ�˵ļ�ָ���ж�ƻ���IJ�ժ����е��ժ��ʱ�dz������������ȣ�ʹ�ü�ָ�ѹ�֦���й̶����ٶԹ�֦�����и��Ϊ��е�ֱ�ͨ���Խ�ǿ�����ԿɶԲ�ͬ��ˮ�����в�ժ���������桢ƻ�����ٵȡ������о���ͳ�ƣ���е��ÿСʱ��ժ����֦���������˹���ժ���������ࡣ�����ҵ�ص��뿪����ͨ�����Ĵ��������ƻ�е�ֵ�ץ���������ͨ��������ժȡ���ѡ��Ϻ�һ����ѧ���Ƶĸߵ�϶�Ŀ�¢��ҵ�����ɶȵIJ�ժ��е�֣�ͨ��ʹ������CCD�������ȡ��ݮ�������������������ݮ������λ�ã�ʹ��������ָ������ץȡ��ݮ�Ĺ�����ʹ��ʵ�����˵õ����⡣����
֣�������Ƴ�һ�ֲ�ժ���һ�е�֣������ɲ�����Ҫ����Һѹ����ϵͳ��Һѹ�á�ҡ��װ�á������С�Ƴ��ȣ���ժװ�ö���װ�����Ƴ��ϣ��������豸���ƶ�[10]�����豸�IJ�ժЧ���ر�ߣ�ÿ����ʵ�IJ�ժʱ���ԼΪһ���ӣ�ȱ���Dz��ܶ������������Ƶ�ʽ��е��ڡ�����
������ѧ�������һ��ҺѹʽҬ����ժ�����������������������������ٴ���Һѹ�ý��в�ժ����[12]������
��������о���һ��â���IJ�ժ��е�֣���ͨ��Һѹ����ϵͳ�������˶�����ʵ����Ӧ�IJ�ժ�������乤����ʱ�ײ���֧���Ƚ���ժ�豸֧��Ȼ������������Ӧ��������������ִ�л����ƶ�����Ӧ��λ�ã����һ�����ƶ�Һѹ������â����֦�����̣��Ӷ���ɲ�ժ�Ĺ���[13]������
������о��ɹ�ͻ����һ���ժ��е���ڽṹ����ļ������ϣ�Ҳ�Ƕ���ͨ�Ļ�е�����з�ʽ����ս��Ϊ��е�ִ���Ƶ�����ũ�����ʹ���ṩ�˷dz�ǿ�������뼼�������֧�š����ǹ�����ƻ����ժ��е�ַ�����о����Ƚ��٣��Ҷ���ƻ����ժ��е�ֵIJ����豸Ҳ��ȫ�����ǣ�ƻ�����г��������ڲ������ӡ�������Ȼ���Ƴ��˲�ժ��е������Ҳû�н��������ʵ�����⣬Ҳ�����ҹ�ʵ�ʲ�ժ��������ϣ����ң��ӹ����IJ�ժ��е�豸�ر𰺹�������ʹ��ƻ���ijɱ����ӡ����Թ�������IJ�ժ��е�ֲ������ڹ���ʵ���ƹ㣬ֻ�����Ƴ�Ч�ʱȽϸߡ��ɱ��ϵ��Լ���ժ�豸������Ӧ�ҹ�ƻ���IJ�ժ��������Ҫ������������
3 �����
���������飬���������һ����轲�ժ��е�֣��û�е�ֵ���Ҫ����Ϊ���ݻ����Ӿ���ȡ��λ�����ݶԻ�е�ֵ�ĩ��ִ�м�����λ�ö�λ����е�ֽ����֦��ץס����е�ָ��ؽ���������轵IJ�ժ������ժ��������载����ռ��ȣ��Խ����轵IJ�ժ���⡣��˶���轲�ժ��е�ֵ��о����ݷ�Ϊ���¼������ݡ�
��1������������ϵķֲ��ص�����ɽ��з�����ȷ����������轵ķֲ�����ȷ���˲�ժ������������ܲ�����Ϊ��ժ��е�����巽��������ṩ�������������ݡ�
��2��������������Ϸֲ��ص㣬��ϻ�е�ֲ�ժ��轵�ʵ�ʹ���Ҫ����ѡ���˲�ժ��е�ֵ�������ʽ��ȷ����ժ��е�ֵ����ɶȡ�ĩ��ִ�л�������ʽ�Ͳ�ժ��е�۵Ľṹ��ʽ�������轲�ժ��е�ֵ�������Ʒ�����Ϊ��ժ��е�ֵĽṹ��Ƶ춨�˻�����
��3��������轲�ժ��е�ֵ�������Ʒ����������轵��������ԶԲ�ժ��е��ĩ��ִ�л������о���Ľṹ��ƣ����ݲ�ժ��е��ĩ��ִ�л����Ľṹ�ͼ��ж���Ҫ�Բ�ժ��е�ֻ�е�۽��нṹ��ƣ�����ݻ�е�۵Ľṹ���Ի�е�۶������ֽ�����ƣ���������˲�ժ��е�ֵ�ȫ���ṹ��ơ�
��4�������˶���������Բ�ժ��е�ֻ�е�۳ߴ����ȷ�Խ��м��顣��
4 �����
4.1���巽��
4.1.1��ժ��е�ֵĹ�������������������ʽ��ȷ��
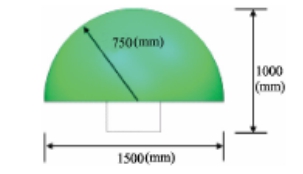
��轾��й�ʵС��Ƥ�������ԣ�ֱ��ֻ��1cm,����Ϊ0.8~2cm,��ʵ�������ڽ�����ˮ����Ƥ���������𣬶��ҹ�ʵ��֦����������������ץȡ������ʵ�֣��Ҵ���Ч�ʵ͵����⡣��������ڹ�ľֲ��߶�Ϊ 0.5 �� 1 m�����Ч��ҵ�ռ�Ϊ1.5 m �� 1 m �� 0.75 m �ij�����[14]��������轵��ص㱾��ƽ�����ģ���˹���ժ��ʽ������˫��е����ϲ�ժ������е�۷ֱ���ò�ͬ��ĩ��ִ�л�����ʵ�����е�۽�֦���̶����������ʺϲ�ժ�Ŀռ䣬�һ�е��ʹ��ʵ��������롣���������������Ӿ�ϵͳ��˫��е��������˫��Эͬ��ҵ�ķ�ʽ��һ����Χ�ڵ���轲�ժ���
ͼ2 ���������ժ����
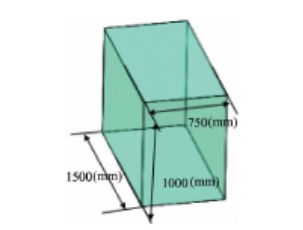
ͼ3 ��Ч��ժ�ռ�����
4.1.2��ժ��е�ֵ�������ʽ��ѡ��
������ʽֱ��Ӱ���Ų�ժ��е�ֵĹ���Ч�ʡ�Ŀǰ����ժ��ҵ�г��õ�������ʽ�����֣��ֱ�Ϊ���������Һѹ��������ѹ�������¶��Զ���������ʽ����ȱ������һ������������
��������ѹ��������
��ѹ����������ʽϸߡ��ṹ���ա������̶ȸߣ��豸�ɱ��͡�ά���㣮������ѹ�������ڽϴ��������Ⱦ�����������������ǻ����ѹ���Ŀǰ�ļ��������º��ѿ�����������������λ��ֹͣ������ѹ����ֻ�ܸ�������Ļ�е���ṩ����������
������Һѹ��������
Һѹ�����ṹ���ա���Ӧ���������������٣����Ƶľ��Ƚϸߣ����ǹ���ʱ�������������ʺϿ����ƶ���Һѹ��������ѹ������ȣ��ṹ���ܷ���Ҫ��ϸߣ�������Һѹ��й©��ԭ������ɱ��ϸߡ�����
�����������������
����������ʽϴ������ȸߡ����ƾ��ȸߣ���ʵ���������ƣ�����������С���Ի�������Ⱦ�����ʹ���ŷ��������ʵ�ֱ�����������ը�ͻ��ֵļ����eС������Ԫ�϶ࡣ����
������������֪������������ʽ�ص㣬������轲�ժ��е����Ҫ���ǵ���е�ֲ�ժ��轵�ʵ���������ҵ������ʵ�������������ѹ�����ٶȽ�������ѹ����ֻ�ܸ�������Ļ�е�������������ˣ���ѹ������Һѹ�������ʺ���Ϊ��轲�ժ��е�ֵ�������ʽ�����������������ӦѸ�٣��ܷ�����轲�ժ�Ĺ��������ҿ������ؾ����䱸���أ�����Ϊ����ṩ���������ԣ�����ѡ�õ��������Ϊ��轲�ժ��е�ֵ�������ʽ��
4.1.3��ժ��е��ĩ��ִ�л�������ȷ��
��1��ץȡװ��
�����֦Ҷ��ï�������ڲ�ժʱͨ����ָ����ķ�ʽȷ�ҵ�֦����������轵������ԣ�����ץȡװ��������Ҫ��
1�� ���С��ץȡװ��ҪӦ�����ܿ���С�ɣ���֤�����Ŀ������֦������Ϊ֦��ĩ�˽���ΪԲ���壬�гֲ���Ҫ���Ǽг���̬��
2�� �ȹ̼г֡��г�����������Ҫ���ڼг�ʱ���ι̵ļг�ס���֦����֦��ĩ�˽���ΪԲ���壬�гַ�λû������Ҫ��
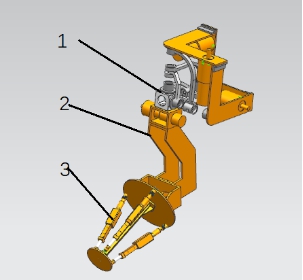
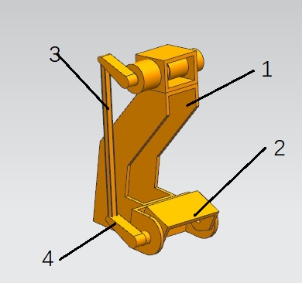
3�� ���Բ��ϡ�ץȡ���������ʱ�����������֦�����ڽӴ�����Ҫʹ�����Բ��ϱ������֦���Ľ���������ʽ�гֻ����������˵�������ָ��������ܹ��ȹ̼г����֦���������������轲�ժ�����˶�ץȡװ�õ�Ҫ����ͼΪһ�ֻ���гֻ�����
ͼ4 ץȡװ��
��2����ժװ��
������ũ��ѧ���������С������е���ջ�չ�о�������ͻ�ƣ��������ժ��ʽ��Ҫ�У��ֲ���ʽ��������ʽ����ˢʽ������ʽ������ʽ�ȡ�Ŀǰ������ѧ�߶��⼸�ֲ�ժ��ʽ����轲�ժ�Ͻ������飬�������:��������������:����>��Ƶ���>��ѹ����>��ѹб��>��ˢ>����;�ڲɾ�����������:����>��ѹ>��Ƶ���>��ˢ>��ѹ>����;�������Ƶ���������,�����������;�����˴ַ��Ͳ��յIJ��շ���Ч���ձ���ھ�ϸ��,Ե����������;���ݲ�����������,�ۺ��������۽��:�ַ���:��Ƶ;���>��ѹ>����;��ϸ��:����>��ѹ>��ˢ�����ڲ��û�е������ѡ�����ʽ���ܱ�֤��ϸ��ͬʱ�����������[15]��
4.1.4��ժ��е�ֻ�е�۽ṹ����ȷ��
1�����ɶȵ�ȷ��
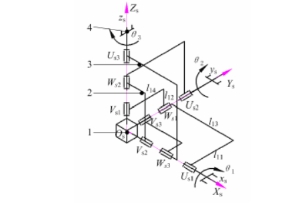
����Ҫģ���˵IJ�ժ��ʽ������Ҫ�������ֱ۷������˵��ֱ۽ṹ��Ҫ������ؽڡ��ϱۡ���ؽڡ�ǰ���Լ���ؽڣ������ϱ���ǰ�۵������ϴ���Ƶ����˻�е����Ҫ�ɼ�ؽڡ���ؽڡ���ؽ���ɡ����м�ؽڵ����ɶ�Ϊ3������ؽڵ����ɶ�Ϊ1������ؽڵ����ɶ�Ϊ3��������ƵĻ�е������ṹ���£�
1-��ؽ� 2-��ؽ� 3-��ؽ�
ͼ5 ��е�۵�����ṹ
2����ؽڵĻ���ѡ��
���������ɶȲ���������һ��������ҪӦ�õ������ɶȲ�����������ʵ��3���ɶ�ת�����������ڶ�ѧ�߶Դ��Ѿ����˴������о�����ȡ������Ӧ�ijɹ���
�����������������ɶȲ���������Ϊ��ؽڵĻ���ԭ�ͣ����˶��ص���Ȼ�������������ؽ��˶���Ҫ������ڹ����Բ�����ɱ��ߵȲ��㡣����ͨ���ı䴫ͳ 3-RRR ������������˽ṹ�õ������������������ɶ�3-RRR�������������øò�������Ϊԭ����Ƶ������ɶȼ�ؽڻ�����ͼ�ͻ�����άͼ���£��ü�ؽڻ������нṹ�������Ժ��������������ŵ�[16]��
1 ��ƽ̨ 2 ���� 3 ���ܸ� 4 ����
ͼ6 �����ɶȼ�ؽڻ�����ͼ
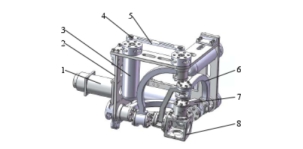
1 �������Ӽ� 2 ���� 3 ������ 4 ������ 5�������� 6 ���ܸ� 7 ���� 8 ��ƽ̨
ͼ7 �����ɶȼ�ؽ���άͼ
3����ؽڵĻ���ѡ��
��ؽ�Ҫ���1�����ɶȵĹ��ܣ����Բ����ĸ˻���ԭ����
1 ���� 2 ��ƽ̨ 3 ������ 4����
ͼ8 ��ؽ�
4����ؽڵĻ���ѡ��
����Ҫ���3���ɶȵĹ��ܣ�����Ʋ����㽭��ҵ��ѧ�����������3-UPS/S
����������ؽ�[17]���������ͼ����άͼ����
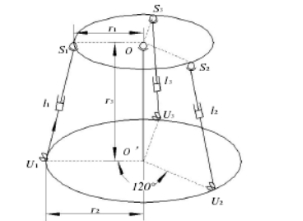
ͼ9 ��ؽڻ�����ͼ
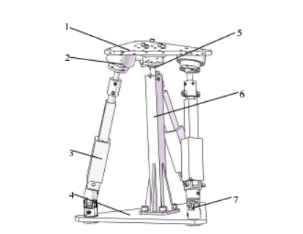
1 ��ƽ̨ 2 ��֧����� 3 ���Ƹ� 4��ƽ̨ 5 �м������ 6 �м�֧�� 7���˽���
ͼ10 ��ؽ���άͼ
5������ṹ
��Ƴ�����轲�ժ��е�ֿ���װ�����е����ܳ��ϡ�
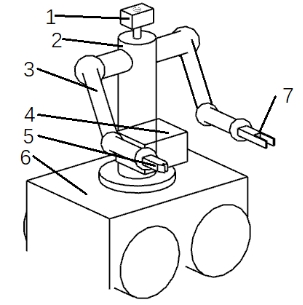
1 �Ӿ�ƽ̨ 2 ���� 3 ��е�� 4 �洢�� 5 ��ժװ�� 6 ������������С�� 7 ץȡװ��
ͼ11 ����ṹ
5 ���ȼƻ�
2018.12.01-2018.12.31�˽���轲�ժʵʩԭ�����Ѽ����ϣ��ж�����
2019.01.01-2019.01.31 �����������ԡ������Է�����Ƚϣ��ⶩ���巽��
2019.02.01-2019.03.10 ȷ��ϸ����Ʒ�����������ά��ģ����������������������飬�Թؼ�����������Ԫ��������ɻ�е�ṹ�������������
2019.03.11-2019.04.30���л�е�ṹ��ϸ��ƣ�������װͼ��������Ҫ�㲿�����ͼ
2019.05.01-2019.05.25��Ƽ���˵����д���ļ������
�����
[1]��������,���۷�.��ժ�������˶�ѧ�����빤���ռ���о�[J].��е�Զ���,2015,3(2):7~9.
[2]ţ����.����Pro/E��ˮ����ժ������������о�.ɽ����ԴѧԺѧ��[J],2014.10(2):23~25.
[3] Yoshihiko Takahashi, et al.Antomatic tomato picking robot system withhuman interface using image proeessing[C].The 27th Annual Confer-ence of the IEEE Industrial ElectronicsSociety,2011:433~438.
[4] R C Harrell.D C Slaughter.eal.A frui-racking system for roboticharvesting [J].Machine Vision and Applications,201 1.(2):69~80.
[5] G.Muscalo.M.Prestiflippo, et al. A Prototype of an orange pickingrobot past history,the new robot and experimental results[J].Industri-al Robot: An International Journal,2015,32.(2):128~138.
[6] Seichi Aiima, Naoshi Kondo, et al.Strawberry harvesting robot on table -topculture[C].ASAE/CSAE Annual International Meeting,2014:1~8.
[7] Shigchiko Hayashi, Tomohiko Ota, et al. Robotic harvesting technologyfor fruit vcgetables in protected horticultural production[J].Informa-tion and Technology for Sustainable Fruit andVegetable Production Frutic,2015. 5:227-236.
[8]�Ե°��ȣ�dz̸�������ժ������[J]���մ�ѧѧ��,2009.33(7):880-884.
[9]֣��,ë����,������,��.����Pro/E��Яʽ���Ҳ�ժ�������[J].ũ�����о�,2014(5):128-131.
[10]����,ʷ��,�����,Ҷ��ϼ,����ϼ.����Һѹʽˮ����ժ��е�ķ�չ��״[J].����ũҵ��ѧ,2018(1):8~11.
[11] Wang Changqin, Xu Linyun, Zhou Hongping, et al. Development and test of eccentric vibration
harvester for forest and fruit [J]. Journal of Agricultural Engineering, 2012 (8):10~16.
[12]����,�ž�.Ҭ����ժ��Һѹϵͳ���[J]Һѹ������,2010(5):27- 28.
[13] Zhao Yun, Wu Chuanyu, Hu Xudong, et al. Research progress and existing problems of agricultural robots [J]. Fruit Trees of China, 2013 (2): 124-126.
[14]��С��,���,����,�Ź�ΰ,����.��轲�ժ������˫��е�۽ṹ��������[J].����ͨѶ,2019,29(02):175-182.
[15]��־��,÷��,Ф����,ʯ־��,������,��ӳ,������.��轲��շ����Ա����������[J].�й�ũ����ѧ��,2019,40(10):110-116.
[16]����. ���˻����˼�����ؽڼ��۵����[D].��ɽ��ѧ,2016.
[17]������. һ������������ؽڵ����[D].�㽭��ҵ��ѧ,2019.
��
