“ΜΓΔ…ηΦΤΡΩΒΡ
≈ύ―χ―ß…ζΒΡΜζ–ΒœΒΆ≥Ζ÷Έω”κΉέΚœΡήΝΠΓΔΜζ–ΒΫαΙΙ…ηΦΤΦΤΥψΡήΝΠΓΔΩΊ÷ΤΤς…ηΦΤΖ÷ΈωΡήΝΠ“‘ΦΑΦρΒΞΜζΒγ“ΜΧεΜ·œΒΆ≥…ηΦΤΡήΝΠΘ§ Ι―ß…ζ≥θ≤Ϋ’ΤΈ’ΜζΒγ“ΜΧεΜ·…ηΦΤΖΫΖ®Θ§ΈΣΫœΗ¥‘”ΜζΒγ“ΜΧεΜ·œΒΆ≥―–ΖΔ¥ρœ¬Μυ¥ΓΓΘ
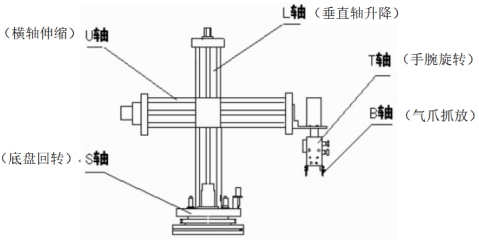
ΕΰΓΔ…ηΦΤΧβΡΩ
…ηΦΤ…ζ≤ζœΏ…œœ¬ΝœΜζ–Β ÷Θ§ Βœ÷‘≤÷υ–Έ45Η÷÷ΤΙΛΦΰ¥”Ι©Νœ¥ΠΒΫΙΛΈΜΒΡΑα‘ΥΓΘΜζ–Β ÷ΉήΧεΖΫΑΗ»γΆΦ1Υυ ΨΘ§Ω… Βœ÷ΙΛΦΰΒΡΉΞΖ≈Θ§ΒΉ≈ΧΜΊΉΣΘ§ ÷Άσ–ΐΉΣΘ§Υ°ΤΫΓΔ¥Ι÷±ΖΫœρΒΡ‘ΥΕ·Θ§ΨΏΧε…ηΦΤ≤Έ ΐΦϊ±μ1ΓΘ
‘≠ΈΜΘΚΤχΉΠΘ®»γ»ΐΉΠΘ©Φ–ΫτΘ§…ΐΫΒ÷α…œ…ΐΒΫΈΜΘ§ΤχΕ· ÷ΆσΥ≥ ±’κΜΊΉΣΒΫ ÷ΉΠΉΞ»ΓΖΫœρ”κΚα÷αΤΫ––Θ§Κα÷αΥθΜΊΒΫΈΜΘ§ΒΉ≈ΧΥ≥ ±’κΜΊΉΣΒΫΈΜΓΘ
‘≠ΈΜ ±Θ§Α¥œ¬ΤτΕ·Α¥≈ΞΘ§Κα÷α…λ≥ωΒΫΈΜΘ§ΤχΕ· ÷ΆσΡφ ±’κ–ΐΉΣΒΫΈΜΘ§ΤχΉΠ’≈ΩΣΘ§…ΐΫΒ÷αœ¬ΫΒΒΫΈΜΘ§ΤχΉΠΦ–ΫτΙΛΦΰΘ§―” ±0.5sΘ§…ΐΫΒ÷α…œ…ΐΒΫΈΜΘ§Κα÷αΥθΜΊΒΫΈΜΘ§ΒΉ≈ΧΡφ ±’κΜΊΉΣΒΫΈΜΘ§Κα÷α…λ≥ωΒΫΈΜΘ§ΤχΕ· ÷ΆσΥ≥ ±’κ–ΐΉΣΒΫΈΜΘ§…ΐΫΒ÷αœ¬ΫΒΒΫΈΜΘ§ΤχΉΠ’≈ΩΣΘ§ΙΛΦΰΖ≈œ¬Θ§―” ±0.5sΓΘΤχΉΠΦ–ΫτΘ§…ΐΫΒ÷α…œ…ΐΒΫΈΜΘ§Κα÷αΥθΜΊΒΫΈΜΘ§ΒΉ≈ΧΥ≥ ±’κΜΊΉΣΒΫ‘≠ΈΜΓΘ
ΆΦ1 ΉήΧε…ηΦΤΖΫΑΗΆΦ
±μ1…ηΦΤ≤Έ ΐ±μ
|
|
ΒΎ“ΜΉι
|
ΒΎΕΰΉι
|
ΒΎ»ΐΉι
|
ΒΎΥΡΉι
|
|
≥Ώ¥γ(÷±ΨΕΓΝΗΏ)
|
ΠΒ24ΓΝ20mm
|
ΠΒ38ΓΝ20mm
|
ΠΒ54ΓΝ40mm
|
ΠΒ58ΓΝ40mm
|
|
Κα÷α––≥Χ
|
80mm
|
120mm
|
160mm
|
200mm
|
|
¥Ι÷±÷α––≥Χ
|
60mm
|
90mm
|
120mm
|
150mm
|
|
ΒΉ≈ΧΜΊΉΣΫ«Ε»
|
180Γψ
|
180Γψ
|
270Γψ
|
270Γψ
|
|
ΤχΉΠ–ΐΉΣΫ«Ε»
|
180Γψ
|
180Γψ
|
180Γψ
|
180Γψ
|
|
ΩΊ÷ΤΖΫ Ϋ
|
PLCΩΊ÷Τ
|
PLCΩΊ÷Τ
|
PLCΩΊ÷Τ
|
PLCΩΊ÷Τ
|
|
«ΐΕ·ΖΫ Ϋ
|
ΒγΜζ+Τχ―Ι«ΐΕ·
|
ΒγΜζ+Τχ―Ι«ΐΕ·
|
ΒγΜζ+Τχ―Ι«ΐΕ·
|
ΒγΜζ+Τχ―Ι«ΐΕ·
|
|
ΥΌΕ»
|
…λΥθΓΔ…ΐΫΒΥΌΕ»Γί40mm/s Θ§ΒΉ≈ΧΜΊΉΣΥΌΕ»Γί90Γψ/sΘ§ΤχΉΠΜΊΉΣΥΌΕ»Γί90Γψ/sΘ§ΤχΉΠΉν¥σΙΛΉςΤΒ¬ 3HzΓΘ
|
»ΐΓΔ…ηΦΤ“Σ«σ
1ΓΔ…ηΦΤΥΒΟς ι1ΖίΘ®ΡΎΚ§…ηΦΤΦΤΥψ ιΓΔΤχΕ·‘≠άμΆΦΓΔPLCΫ”œΏΆΦΚΆ≥Χ–ρΒ»Θ©ΘΜ2ΓΔΉΑ≈δΆΦΘ®0Κ≈ΆΦ÷Ϋ1’≈Θ©ΓΘ
ΥΡΓΔ ΫχΕ»Α≤≈≈
1ΓΔΉήΧεΖΫΑΗ…ηΦΤ”κΦΤΥψΓΔΝψ≤ΩΦΰ―Γ–ΆΓΔΤχΕ·‘≠άμΆΦ 3ΧλΘΜ2ΓΔΜζ–Β ÷ΉΑ≈δΆΦΜφ÷Τ 3ΧλΘΜ3ΓΔPLCΫ”œΏΆΦΦΑ≥Χ–ρ…ηΦΤΓΔΒς ‘ 4ΧλΘΜ4ΓΔΉΪ–¥…ηΦΤΥΒΟς ι 2ΧλΘΜ5ΓΔ¥π±γ1ΧλΓΘ
