�˹������Ļ����ˣ�2011��16:86�C89©isarob 2011
10.1007/s10015-011-0892-1
S. Ueki �� H. Kawasaki �� Y. Ishigure �� K. Koganemaru
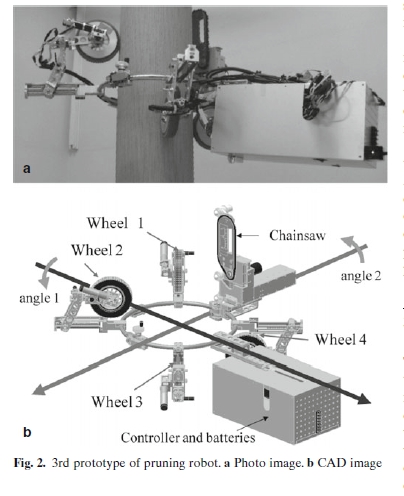
Y. Moriһ���µ��������˵�ʵ���о���չ���ձ�ֻ��һ����ҵ��Ʒ����̨������������һ����ʹ�õ������֦��Ȼ����������������25����ͻ������ٶ��谭����Ϊ���ɭ��Σ������ѽ��������һ����������ƽ̨�DZ���ģ���Ϊ���ձ�����ɽ���ж��͵�ɽ�£�һ����������������һ������������ǰ�������˵�����״̬���������һ�����µ��������˶������������������ܸ�Ч������������ϵ�����������Ϊ����Ӧ�ڻ����ɽ�������������ܹ�����֮���ֱ�ߺ������������÷�����֤�˻����˵��������������ٶ����������ڵij�������ǽ����˻�������Ƹ����������ԭ��ʵ��������ˡ����⣬�����ɽ���Ѿ�֤�������������˿��Ը��ٵ��������´�������������DZ������ǿ��������˵Ľ�չ��רע��ֱ�������ڲ�ƽ̹�ı����ϵĹ�����������2�Ƚ��������������Ž����������ռ�Ŀ������ˣ������Ѿ�������һ�����͵���ɽ����������ѹ��ץ���ƣ��������������˱��������������ձ���ͳ�ķ�ľ������������ʱ��ͼ1�������õ�һ�˺����ӣ�������ν�ġ�burinawa�������ղ�ס��ץס���ɣ���������������λ�������ǵģ��ÿ������Լ�������ͣ�������ϡ�������һ�µ���ҵ��ҵ����Ƹ����Ҫ�������������˺ܴ�ķ�չ����ͼ2��ʾ���û������䱸���������֡���1��2λ���ϲ࣬3
3.3������
����ʵ�飬���������ǵ���ԭ�Ϳ�������֦��һ�����ӵĵ������һ��24V����ֱ����������������������������ٶ���0.03��/���ֱ��������Ŀ���Ϊ0.01�ס�
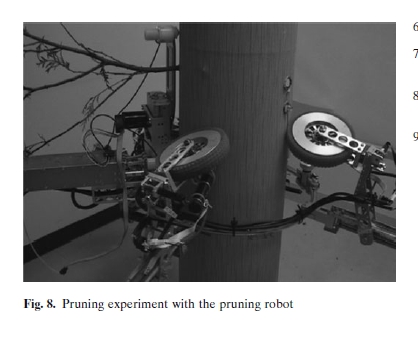
ͼ7����ÿһ������¹��Ǻ����ǡ�һ��1��ȥ�İ���B��2ͨ������C��3ͨ������D��4ͨ����ͼ8�����������������飬ʵ��ij�����ͼ8��ʾ�������ʵ���У�
��֦���жϣ�ֻ����һ�����ݵIJ�����С��0.005�ף�������û�����ˡ�
4����
һ����ľ�������ķ������̣��������Ѿ������������ֱ�������ڲ�ƽ̹�ı�����Ϊ������֦����ʵ�������ֱ������ԭ����һ���ܺõĻ������ܡ������Ľ���ڲ�ƽ̹��·���������б��ֳ����õ�³���Ե�������Ϊ�������������С��ʵ����ײ�����⣬������
������������ԭ�Ϳ�������֦��һ�������ڽ��Ĺ����У�����ϣ����ʵ�ʻ����еĻ����˲��ԣ�������һЩ��һ���ĸĽ���
��������
1���ž���������2009�꿪���е������ڻ�����ľ����2009�ٽ��˳���1A2�CD07�ķ�չ��
2��kushihashi Y������2006�귢չ�˽ṹ����ץ����������������������ľ�����ձ�����2006�꿪չ����������������һ�廯���顣
3��Suga Y������2006�꿪����������������ľ����ִ���������ڱ۶�Ϊ����ת�˶����ձ������ٽ���si2006��PP1267�C1268
4��Yokoyama T, Kumagai K, Arai Y�����ˣ�2006����������֦�������˵�ͼ����ϵͳ�ļ�Ч���ձ�������2006�꿪չ�˳���ͻ����˻���һ�廯���顣
5��Yamada T, Maeda K, Sakaida Y��et al��2005���о����ڻ����˵���ϵͳ����չ�˻�����������Ԫ���ձ�������չ�˻�����2005�ձ���еѧ�������һ�廯���顣
6��ʥ����ҵ��http://www.seirei.com/products/fore/ab232r/ab232r��HTML��2011��5�¿��Է���
7��Kawasaki H, Murakami S, Kachi H�����ˣ�2008��������ʵ��������ɽ������չ��2008��PP 160�C163��SICE���顣
8��Kawasaki H, Murakami S, Koganemaru K�����ˣ�2010������һ�������������������������ˡ��ٽ�455�CCLAWAR 2010��PP 463��ҵ�ķ�չ
9��Kato T, Koganemaru K, Tanaka A�����ˣ�2010��������һ�������������������������ˣ��ձ������ٽ���rsj2010�������ݵķ�չ��
