Ек1еТ аїТл
1.1 ФЅДВЛњаЕЪждкЩњВњжаЕФгІгУ
дкЪЕМљжаЃЌздЖЏЩЯЯТСЯЛњЦїЪжМИКѕПЩвддкЙЄвЕЩњВњжаЕФИїааИївЕБЛДѓСПЙуЗКгІгУЃЌОпгаВйзїЗНБуЃЌаЇТЪИпЃЌЙЄМўжЪСПИпЕШгХЕуЃЌЭЌЪБНЋВйзїЙЄШЫДгЗБжиЃЌЕЅЕїЕФЙЄзїЛЗОГжаНтОШГіРДЃЌдНРДдНЪмЕНЩњВњГЇМвЕФЧрэљЃЌгЕгаДЫЬзЩњВњЯпЪЦБиФмЭЙЯдЦѓвЕЩњВњЪЕСІЃЌЬсИпЪаГЁЕФОКељСІЃЌЪЧЙЄвЕЩњВњМгЙЄЕФБиШЛЧїЪЦЁЃ
1.2ФЅДВЛњаЕЪжЕФЩшМЦФПЕФ
ФЅДВЛњаЕЪжжївЊЪЕЯжФЅДВжЦдьЙ§ГЬЕФЭъШЋздЖЏЛЏЃЌВЂВЩгУСЫМЏГЩМгЙЄММЪѕЃЌЪЪгУгкЩњВњЯпЕФЩЯЯТСЯЁЂЙЄМўЗзЊЁЂЙЄМўзЊађЕШЁЃдкЙњФкЕФЛњаЕМгЙЄ, ЯжНёКмЖрЖМЪЧЪЙгУзЈЛњЛђШЫЙЄНјааФЅДВЩЯЯТСЯЕФЗНЪН, етдкВњЦЗБШНЯЕЅвЛЁЂВњФмВЛИпЕФЧщПіЯТЪЧЗЧГЃЪЪКЯЕФ, ЕЋЪЧЫцзХЩчЛсЕФНјВНКЭЗЂеЙ, ПЦММЕФШевцНјВН, ВњЦЗИќаТЛЛДњМгПь, ЪЙгУзЈЛњЛђШЫЙЄНјааФЅДВЩЯЯТСЯОЭБЉТЖГіСЫКмЖрЕФВЛзуКЭШѕЕу, вЛЗНУцзЈЛњеМЕиУцЛ§ДѓНсЙЙИДдгЁЂЮЌаоВЛБу, ВЛРћгкздЖЏЛЏСїЫЎЯпЕФЩњВњ;СэвЛЗНУц, ЫќЕФШсадВЛЙЛ, ФбвдЪЪгІШевцМгПьЕФБфЛЏ,ВЛРћгкВњЦЗНсЙЙЕФЕїећ;ЦфДЮ, ЪЙгУШЫЙЄЛсдьГЩРЭЖЏЧПЖШЕФдіМг, ШнвзВњЩњЙЄЩЫЪТЙЪ, аЇТЪвВБШНЯЕЭЯТ, ЧвЪЙгУШЫЙЄЩЯЯТСЯЕФВњЦЗжЪСПЕФЮШЖЈадВЛЙЛ, ВЛФмТњзуДѓХњСПЩњВњЕФашЧѓЁЃ
ЪЙгУЩЯЯТСЯЛњЦїШЫздЖЏШсадАсдЫЯЕЭГОЭПЩвдНтОівдЩЯЮЪЬт, ИУЯЕЭГОпгаКмИпЕФаЇТЪКЭВњЦЗжЪСПЮШЖЈад, ШсадНЯИпЧвПЩППадИп, НсЙЙМђЕЅИќвзгкЮЌЛЄ, ПЩвдТњзуВЛЭЌжжРрВњЦЗЕФЩњВњ, ЖдгУЛЇРДЫЕ, ПЩвдКмПьНјааВњЦЗНсЙЙЕФЕїећКЭРЉДѓВњФм, ВЂЧвПЩвдДѓДѓНЕЕЭВњвЕЙЄШЫЕФРЭЖЏЧПЖШЁЃ
Ек2еТ ФЅДВЛњаЕЪжЕФзщГЩгХдНад
2.1 ФЅДВЛњаЕЪжЕФзщГЩ
зщГЩВПЗжгаЃКСЂжљЁЂКсСК(Xжс)ЁЂЪњСК(Zжс)ЁЂПижЦЯЕЭГЁЂЩЯЯТСЯВжЯЕЭГЁЂзІЪжЯЕЭГЕШЁЃ
ПижЦЯЕЭГЃКЛњЦїШЫПижЦЯЕЭГЪЧећЬѕздЖЏЛЏЯпЕФДѓФдЃЌПижЦзХУПВПЗжЛњЙЙЃЌМДПЩвдЖРСЂЙЄзїЃЌвВПЩвдаЕїКЯзїЃЌЫГРћЭъГЩЩњВњЁЃЛњЦїШЫПижЦЯЕЭГЙІФмЃК ЂйЖдЛњЦїШЫдЫааЙьМЃНјааБрГЬ;ЂкЖдИїВПЗжЛњЙЙЖРСЂВйзї;Ђл ЬсЙЉБивЊЕФВйзїжИЕММАеяЖЯаХЯЂ;Ђм ФмаЕїЛњЦїШЫгыЛњДВжЎМфЕФЙЄзїЙ§ГЬ;Ђн ПижЦЯЕЭГОпгаЗсИЛЕФI/OПкзЪдДЃЌПЩРЉеЙ;ЂоЖржжПижЦФЃЪНЃЌШчЃКздЖЏЃЌЪжЖЏЃЌЭЃжЙЃЌМБЭЃЃЌЙЪеЯеяЖЯЁЃШчЭМ2.1.1ЫљЪО

ЭМ2.1.1 ПижЦЯЕЭГ
ЩЯЯТСЯВжЯЕЭГЃКМАДЂДцД§МгЙЄжсРрЮяЦЗЕФДцДЂЧјЁЃШчЭМ2.1.2ЫљЪО

ЭМ2.1.2ЩЯЯТСЯВжЯЕЭГ
зІЪжЯЕЭГЃКБъзМЦјЖЏЪжзІЁЂЮќХЬРрЪжзІЁЂзджЦЕчЖЏЪжзІЁЂЖЈжЦЬиЪтЪжзІЁЃБОУќЬтжївЊдЫгУЖЈжЦЬиЪтЪжзІЁЃ
жсГаЃКБЃГжжсЯђвЦЖЏЦНаа
ШчЭМ2.1.3ЫљЪО

ЭМ2.1.3 ЖЈжЦЬиЪтЪжзІМАжсГа
2.2 ФЅДВЛњаЕЪжЕФгХдНад
(1) ЩњВњаЇТЪИпЃКвЊЬсИпЩњВњаЇТЪЃЌБиаыПижЦЩњВњНкХФЁЃГ§СЫЙЬЖЈЕФЩњВњМгЙЄНкХФЮоЗЈЬсИпЭтЃЌздЖЏЩЯЁЂЯТСЯШЁДњСЫШЫЙЄВйзїЃЌетбљОЭПЩвдКмКУЕФПижЦНкХФЃЌБмУтСЫгЩгкШЫЮЊвђЫиЖјЖдЩњВњНкХФВњЩњЕФгАЯьЃЌДѓДѓЬсИпСЫЩњВњаЇТЪЁЃ
(2) ЙЄвеаоИФСщЛюЃКЮвУЧПЩвдЭЈЙ§аоИФГЬађКЭЪжзІМаОпЃЌбИЫйЕФИФБфЩњВњЙЄвеЃЌЕїЪдЫйЖШПьЃЌУтШЅСЫЖддБЙЄЛЙвЊНјааХрбЕЕФЪБМфЃЌПьЫйОЭПЩЭЖВњЁЃ
(3) ЬсИпЙЄМўГіГЁжЪСПЃКЛњЦїШЫздЖЏЛЏЩњВњЯпЃЌДгЩЯСЯЃЌзАМаЃЌЯТСЯЭъШЋгЩЛњЦїШЫЭъГЩЃЌМѕЩйСЫжаМфЛЗНкЃЌСуМўжЪСПДѓДѓЬсИпЃЌЬиБ№ЪЧЙЄМўБэУцИќУРЙлЁЃ
2.3ФЅДВЛњаЕЪжЕФЙцИёВЮЪ§
жївЊММЪѕвЊЧѓЃК
1ЁЂЙЄМўжиСПЁм1KGЃЌжБОЖЁм400mmЃЛ
2ЁЂЩ§НЕааГЬЃКЁм200mmЃЌЩьЫѕааГЬЃКЁм400mmЃЛ
3ЁЂЧ§ЖЏЗНЪНЃКЫХЗўЕчЛњ
4ЁЂПижЦЗНЪНЃКPLC
5ЁЂздгЩЖШЪ§ЃК3
6ЁЂећЛњжиСПЃКдМ40KG
7ЁЂЕчдДЃК220VAC/24VDC
Ек3еТ ЛњаЕЪжЩшМЦЗНАИ
ЭЈЙ§ЖдЪ§ПиЛњДВЩЯЯТСЯзївЕЕФОпЬхЗжЮіЃЌПМТЧЪ§ПиЛњДВМгЙЄЕФОпЬхаЮЪНМАЖдЛњаЕЪжЩЯЯТСЯзївЕЪБЕФОпЬхвЊЧѓЃЌдкТњзуЯЕЭГЙЄвевЊЧѓЕФЧАЬсЯТЬсИпАВШЋКЭПЩППадЃЌЮЊЪЙЛњаЕЪжЕФНсЙЙОЁСПМђЕЅЃЌНЕЕЭПижЦЕФФбЖШЃЌБОЩшМЦЪжЭѓВЛдіМгздгЩЖШЃЌЪЕМљжЄУїетЪЧЭъШЋФмТњзузївЕвЊЧѓЕФЃЌ3ИіздгЩЖШРДЪЕЯжЛњДВЕФЩЯЯТСЯЭъШЋзуЙЛЁЃ
3.1ГнТжГнЬѕЪНЪжВПЩшМЦЕФЛљБОвЊЧѓ
ЃЈ1ЃЉгІОпгаЪЪЕБМаНєСІКЭЧ§ЖЏСІ
ЃЈ2ЃЉЪжжИгІОпгавЛЖЈЕФПЊБеЗЖЮЇ
ЃЈ3ЃЉгІБЃжЄЙЄМўдкЪжжИФкЕФМаГжОЋЖШ
ЃЈ4ЃЉвЊЧѓНсЙЙНєДеЁЂжиСПЧсЁЂаЇТЪИп
ЃЈ5ЃЉгІПМТЧЭЈгУадКЭЬиЪтвЊЧѓЁЃ
3.2ГнТжГнЬѕЪНЪжВПНсЙЙ
жївЊЛЎЗжгаЛизЊаЭЁЂвЦЖЏаЭЁЂЦНУцЦНаавЦЖЏаЭШ§жжЃЌЮвДђЫуЩшМЦЕФЪЧГнТжГнЬѕЪНЕФЪжзІЃЌетжжНсЙЙОпгаНсЙЙМђЕЅЃЌЖЏзїСщЛюЃЌЪжжИПЊБеНЧЖШДѓЕШЬиЕуЁЃ
НсКЯОпЬхЕФЙЄзїЧщПіЃЌБОЩшМЦВЩгУГнТжГнЬѕЪНЕФЪжзІЁЃЧ§ЖЏЛюШћЭљИДвЦЖЏЃЌЭЈЙ§ЛюШћИЫЖЫВПГнЬѕЃЌжаМфГнЬѕМАЩШаЮГнЬѕЪЙЪжжИеХПЊЛђБеКЯЁЃЪжжИЕФзюаЁПЊЖШгЩМгЙЄЙЄМўЕФжБОЖРДЕїЖЈЁЃБОЩшМЦАДееЙЄМўЕФжБОЖЮЊ40mmРДЩшМЦЁЃЪжзІЕФОпЬхНсЙЙаЮЪНШчЭМ3.2ЫљЪОЃК
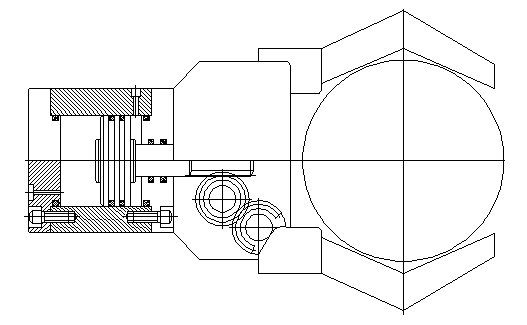
ЭМ3.2 ЪжзІ

3.3ГнТжГнЬѕЪНЪжВПЕФМЦЫугыЗжЮі
ЪжжИМгдкЙЄМўЩЯЕФЮеСІЃЈМДМаНєСІЃЉЃЌЪЧЩшМЦЪжВПЕФжївЊвРОнЃЌЦфДѓаЁгыБЛМаГжЙЄМўЕФжиСПЃЈгУGБэЪОЃЉЁЂжиаФЮЛжУвдМАМаГжЙЄМўЕФЗНЮЛгаЙиЁЃ
МаЧЏЪНЪжВПЮеСІЕФМЦЫуЃЌБиаыИљОнЪжжИКЭЙЄМўЕФаЮзДЃЌЪжжИМаГжЙЄМўЪБЕФВЛЭЌЗНЮЛНјааОпЬхЗжЮіЁЃ
3.4МаНєзАжУгыЦјЖЏзАжУ
МаНєзАжУЪЧЪЙЪжжИПЊЁЂБеЖЏзїЕФЖЏСІзАжУЁЃЦфЖЏСІдДПЩвдЪЧЕчЖЏЁЂвКЖЏЛђЦјЖЏЕШЁЃБОДЮЩшМЦЮЊЦјЖЏМгНєзАжУЁЃЕчЖЏЧ§ЖЏЪЙгУЕчЛњ:ЦјЖЏЧ§ЖЏзАжУЕФаЮЪНвЛАугаЫЋЯђзїгУКЭЕЅЯђзїгУЛюШћИзСНжжЁЃБОДЮЩшМЦЮЊЫЋЯђзїгУЛюШћИзЁЃШчЭМ3.4
ЭМ3.4ЦјЖЏМгНєзАжУМАЫЋЯђзїгУЛюШћИз
ЕкЫФеТ НсЪјгя
ЮвЕФБЯвЕЩшМЦПЮЬтЮЊЁЖФЅДВЕФЛњаЕЪжЩшМЦЁЗЃЌЫќЪЧвЛжжНсЙЙНЯЮЊМђЕЅЕФЩЯЯТСЯЛњЦїШЫЃЌЕЋЪЧБОДЮЩшМЦШУЮвНЋПЮБОжажЊЪЖдЫгУдкЪЕМЪжаШУЮвЪмвцЗЫЧГЁЃШУЮвжЊЕРЕЅДПЕФРэТлжЊЪЖЛЙВЛЙЛЃЌЮвашвЊеце§ЕизХЪжШЅзіЁЃдкНёКѓЕФШезгРяЃЌЮвашвЊащаФЕиЯђГЄБВУЧбЇЯАЃЌВЛЖЯЕиЭъЩЦздМКЁЃ
аЛ ДЧ
БЯвЕЩшМЦЕУвдЫГРћЭъГЩЃЌвЊИааЛЕФШЫЪЕдкЬЋЖрСЫЁЃЪзЯШвЊждаФЕиИааЛЮвЕФжИЕМРЯЪІСѕЦМРЯЪІЃЌФњбЯНїЕФжЮбЇЬЌЖШЃЌПЊРЋЕФЫМЮЌЃЌббЩЦгеЕФжИЕМвЛжБИјЮвКмДѓЕФАяжњЁЃЕБЮвЖдБЯвЕЩшМЦЕФЫМТЗИаЕНУдУЃЪБЃЌФњЮЊЮвРэЧхЫМТЗЃЌжИЕМЮвЭљвЛЬѕБШНЯЧхЮњЕФЫМТЗЩЯНјаааоИФЁЃдкБЯвЕЩшМЦЕФВЛЖЯаоИФжаЃЌЮввВХЌСІзіЕНМАЪБЛ§МЋЕиИњаЄРЯЪІНЛСїЃЌвђЮЊЮвОѕЕУетбљПЩвдЪЙЕУЮвЕФБЯвЕЩшМЦИќМгЭъЩЦЁЃБЯвЕЩшМЦЕФзюжеЭъГЩЃЌвВЪЧвЛВЈШ§елЁЃдкВЛЖЯЭъЩЦКЭаоИФЕФЙ§ГЬжаЃЌвВШУЮвИќМгЖЎЕУ"вЛЗжИћдХВХгавЛЗжЪеЛё"ЕФЕРРэЁЃдйДЮЖдФњБэЪОИааЛЃЌЪІЖїЮАДѓЃЌЮовдЛиБЈЁЃ
ВЮПМЮФЯз
[1] Н№гЂМЇ вКбЙгыЦјЖЏММЪѕ ИпЕШНЬг§ГіАцЩч 2012Фъ6дТЕкЫФАц
[2] ГТСЂЕТ ТоЮРЦН ЛњаЕЩшМЦЛљДЁ ИпЕШНЬг§ГіАцЩч 2013Фъ7дТЕкЫФАц.
[3] аьУЏЙІ ЙЋВюХфКЯгыММЪѕВтСП ЛњаЕЙЄвЕГіАцЩч 2012Фъ12дТЕкЫФАц
[4] аЄЕТМЦ ГТФўЛЊ ЛњДВМаОпЩшМЦ ЛњаЕЙЄвЕГіАцЩч, 2016Фъ6дТЕкЫФАц
[5] СѕаЁФъ ЛњаЕжЦЭМ ЛњаЕЙЄвЕГіАцЩч 2000Фъ5дТЕк2Ац
[6] ГЩДѓЯШ ЛњЦїЩшМЦЪжВсЃЈЕк4ОэЃЉББОЉЃКЛЏбЇЙЄвЕГіАцЩчЃЌ2002Фъ
[7] ЩђіЮИе ЫяЧЇРя СѕЦМ ЙЂН№СМ ЩЃСшЗх ЙЄвЕЛњЦїШЫБрГЬгыгІгУ 2016ФъШ§дТ
[8] ГТСЂЕТ ЛњаЕЩшМЦЛљДЁПЮГЬЩшМЦжИЕМЪщ[M].ИпЕШНЬг§ГіАцЩч, 2013Фъ7дТЕкЫФАц.
[9] РЭЖЏКЭЩчЛсБЃеЯВПНЬВФАьЙЋЪвзщжЏБраД proEгІгУЪЕбЕ CAD/CAMММЪѕжаЙњРЭЖЏЩчЛсБЃеЯГіАцЩч
[10] ИпШйЛл ЙЄвЕЛњаЕЪжЩшМЦ КЯЗЪЙЄвЕДѓбЇГіАцЩч 2014Фъ12дТЕквЛАц
