摘 要
室内地面清洁是一项繁重乏味、费时费力的体力活。智能移动清洁机器人的出现很好地解决了这一问题。将吸尘器技术和智能机器人技术完美地融合在一起的智能吸尘器,它的结构简单,行动灵活智能,实现了室内无人自主清洁,是一种省时省力,健康环保的室内清洁机器人,具有广阔的商业价值和应用前景。
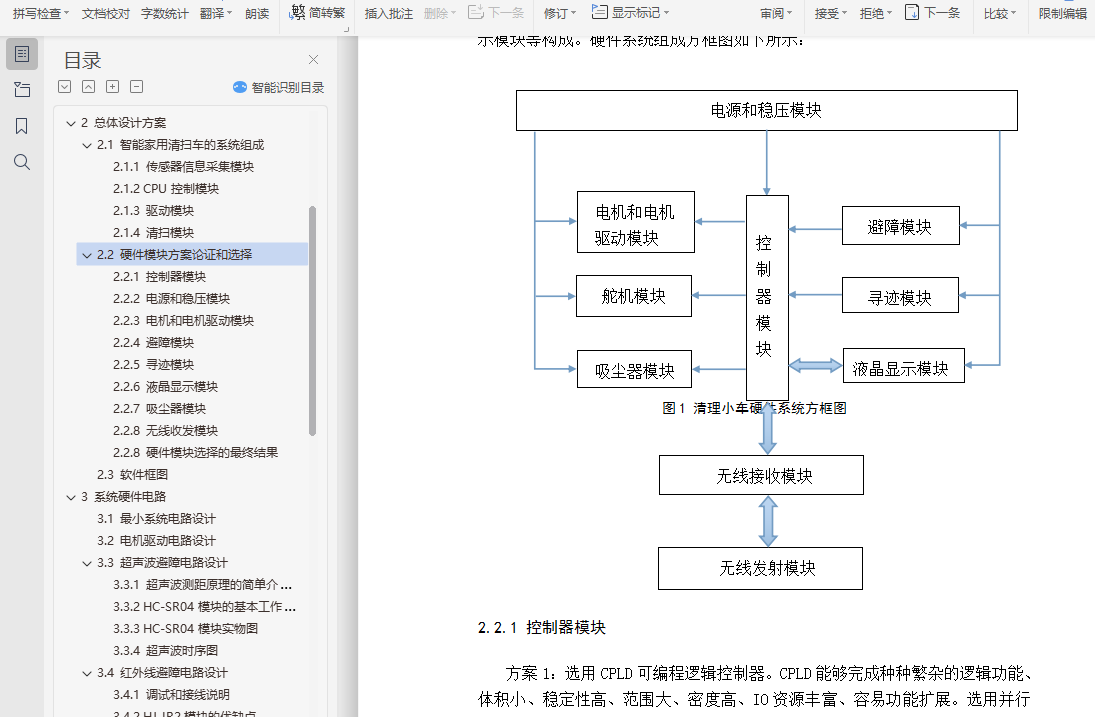
论文将介绍如何把单片机多功能智能小车应用于家用清洁工作中。论文将以单片机最小系统为硬件开发基础,详细阐述了系统主要的硬件结构设计。在此基础上,对智能家居清洁小车导航系统进行了深入的研究,阐述了超声波传感器的特点,数据处理和存在的问题,与其他传感器融合,来满足对室内障碍物的探测,从而实现智能家用清洁车的导航、避障、路径规划等功能。设计分为以下几个模块:传感器采集模块、CPU控制模块、驱动模块、清扫模块。设计的重点主要集中在信息采集和决策模块上。
关键词:智能清洁小车;单片机;导航避障;超声波红外线;路径规划
ABSTRACT
Is a heavy and tedious, time-consuming and laborious manual work of cleaning the indoor floor. Intelligent cleaning robot is a good solution to this problem.Vacuum technology and intelligent robot technology perfect combination of intelligent cleaner together, it has the advantages of simple structure, flexible action intelligence, to implement indoor unmanned cleaning, is a time-saving,indoor cleaning robot of environmental health, has a broad commercial value and application prospect.
paper will introduce how the multifunctional intelligent car application of single chip microcomputer in household cleaning work. paper will be the smallest single-chip system based on hardware development, the detail of the hardware design of the main system. On this basis, the intelligent Home Furnishing clean car navigation system is studied deeply, expounds the characteristics of ultrasonic sensors, data processing and the existing problems,integration with other sensors, to meet the detection of indoor obstacles, so as to realize the intelligent household cleaning vehicle navigation, obstacle avoidance,path planning and other functions. Design is divided into the following modules: sensor acquisition module, CPU control module, driver module,cleaning module. The design mainly focus on information gathering and decision module.
Key words: intelligent cleaning trolley; single chip microcomputer; navigation and obstacle avoidance; ultrasonic infrared; path planning
目 录
1 绪论 1
1.1 课题研究背景及意义 1
1.2 国内外研究现状 1
1.2.2 国外研究现状 1
1.2.2 国内研究现状 2
1.3 清洁机器人技术现状 3
1.3.1 路线规划技术 3
1.3.2 定位技术 3
1.3.3 多传感器融合技术 3
1.3.4 吸尘技术 4
1.4 本课题主要研究内容 4
2 总体设计方案 5
2.1 智能家用清扫车的系统组成 5
2.1.1 传感器信息采集模块 5
2.1.2 CPU控制模块 5
2.1.3 驱动模块 5
2.1.4 清扫模块 5
2.2 硬件模块方案论证和选择 6
2.2.1 控制器模块 7
2.2.2 电源和稳压模块 7
2.2.3 电机和电机驱动模块 7
2.2.4 避障模块 8
2.2.5 寻迹模块 9
2.2.6 液晶显示模块 9
2.2.7 吸尘器模块 9
2.2.8 无线收发模块 10
2.2.8 硬件模块选择的最终结果 10
2.3 软件框图 11
3 系统硬件电路 12
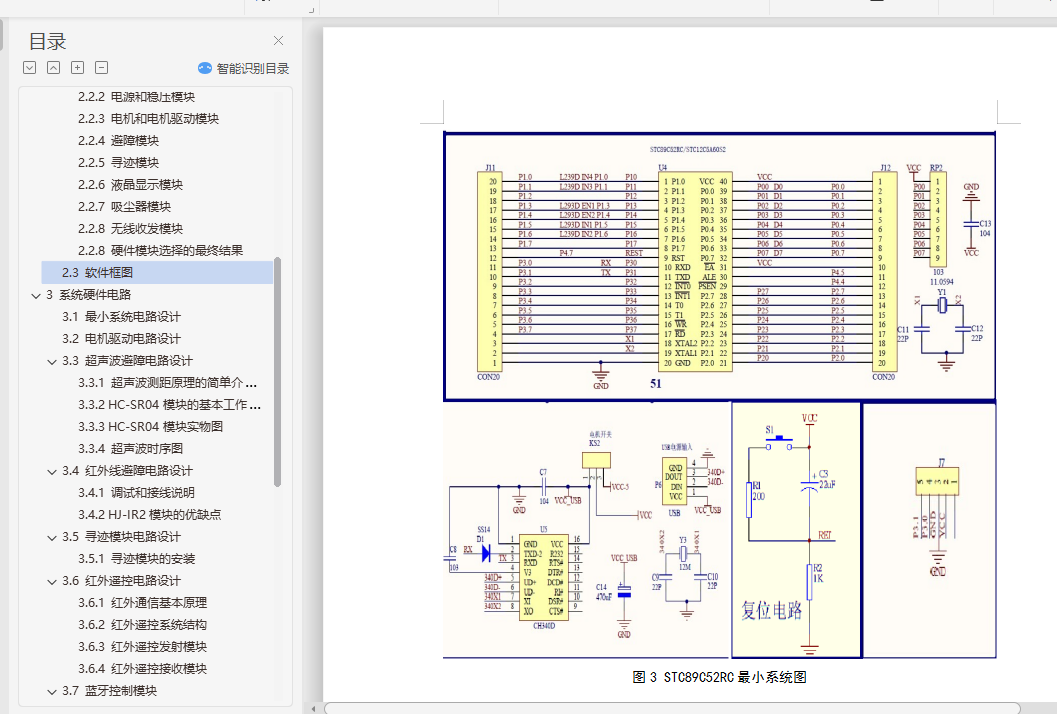
3.1 最小系统电路设计 12
3.2 电机驱动电路设计 13
3.3 超声波避障电路设计 15
3.3.1 超声波测距原理的简单介绍 16
3.3.2 HC-SR04模块的基本工作原理 17
3.3.3 HC-SR04模块实物图 17
3.3.4 超声波时序图 18
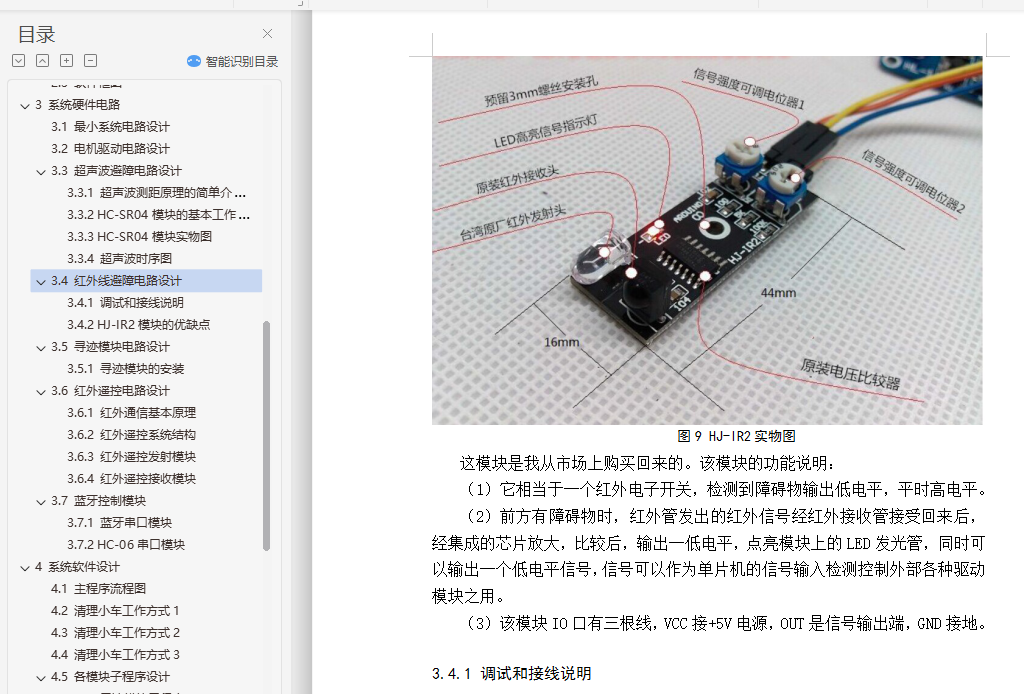
3.4 红外线避障电路设计 18
3.4.1 调试和接线说明 19
3.4.2 HJ-IR2模块的优缺点 20
3.5 寻迹模块电路设计 20
3.5.1 寻迹模块的安装 22
3.6 红外遥控电路设计 22
3.6.1 红外通信基本原理 22
3.6.2 红外遥控系统结构 23
3.6.3 红外遥控发射模块 24
3.6.4 红外遥控接收模块 28
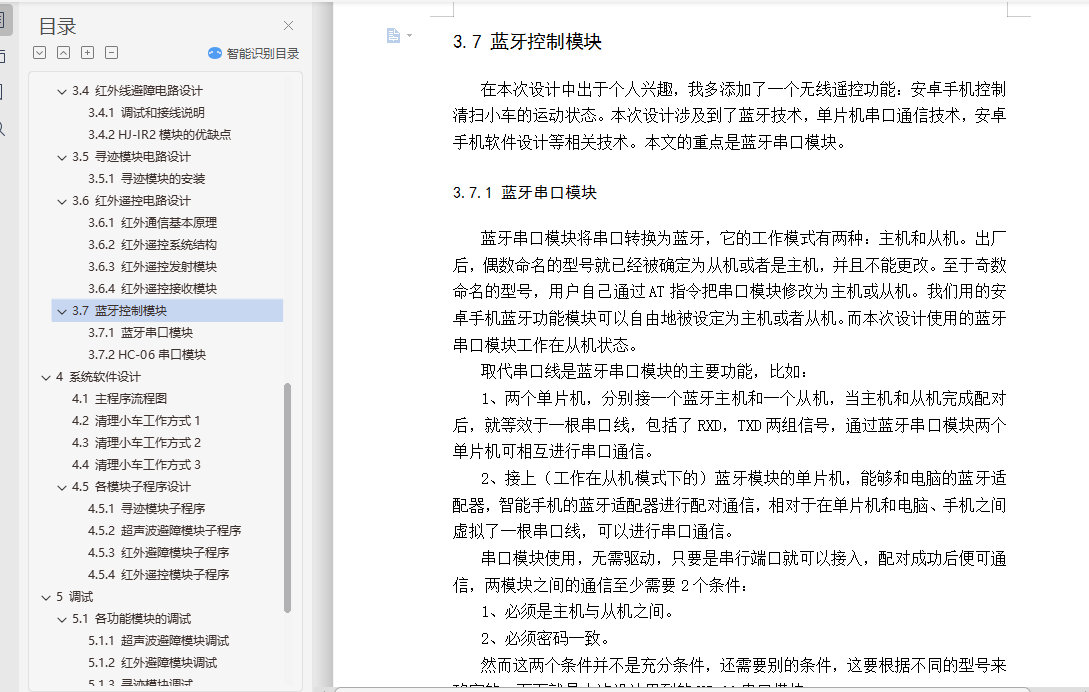
3.7 蓝牙控制模块 29
3.7.1 蓝牙串口模块 29
3.7.2 HC-06串口模块 29
4 系统软件设计 32
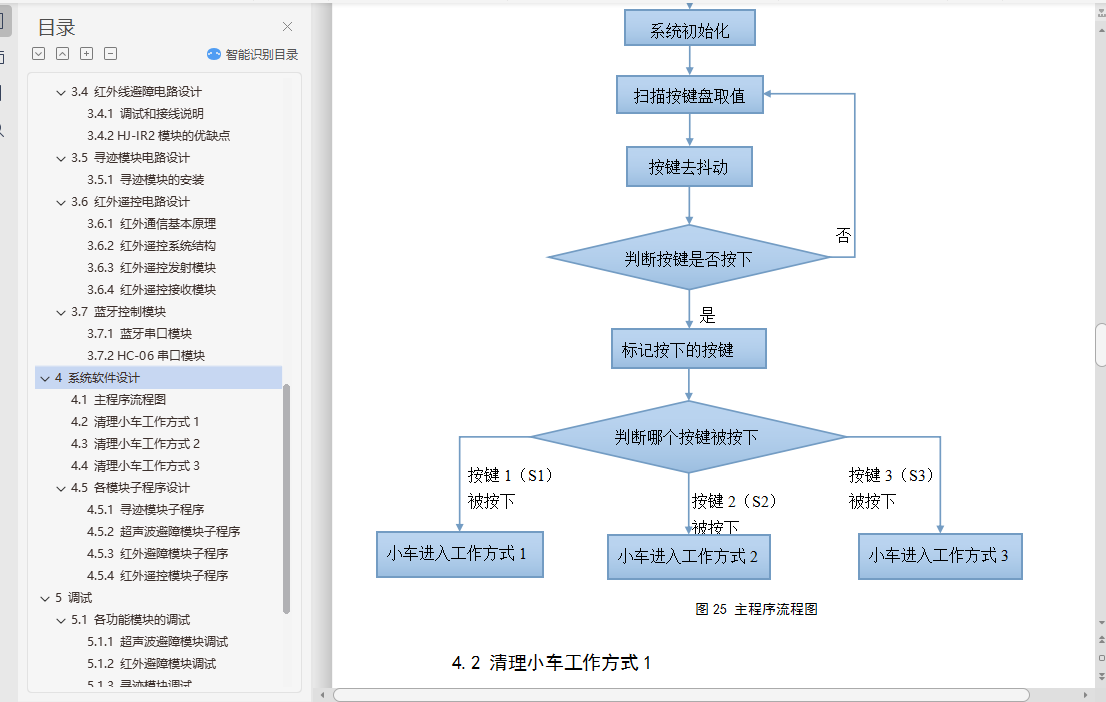
4.1 主程序流程图 32
4.2 清理小车工作方式1 33
4.3 清理小车工作方式2 34
4.4 清理小车工作方式3 37
4.5 各模块子程序设计 39
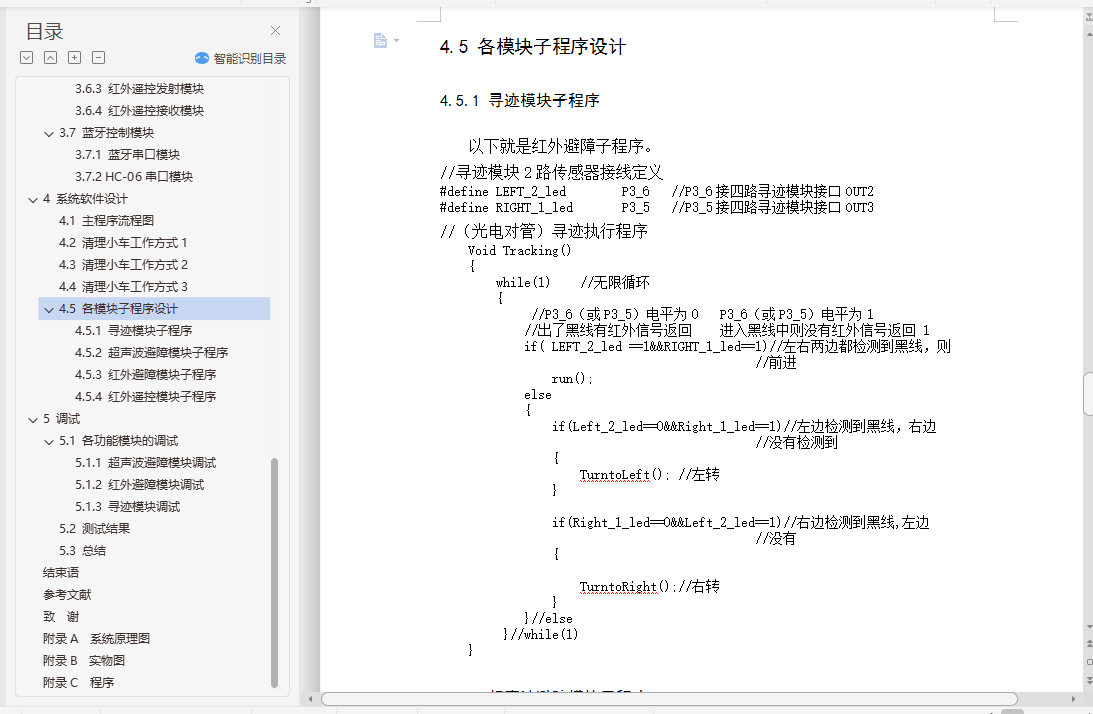
4.5.1 寻迹模块子程序 39
4.5.2 超声波避障模块子程序 39
4.5.3 红外避障模块子程序 40
4.5.4 红外遥控模块子程序 41
5 调试 43
5.1 各功能模块的调试 43
5.1.1 超声波避障模块调试 43
5.1.2 红外避障模块调试 43
5.1.3 寻迹模块调试 44
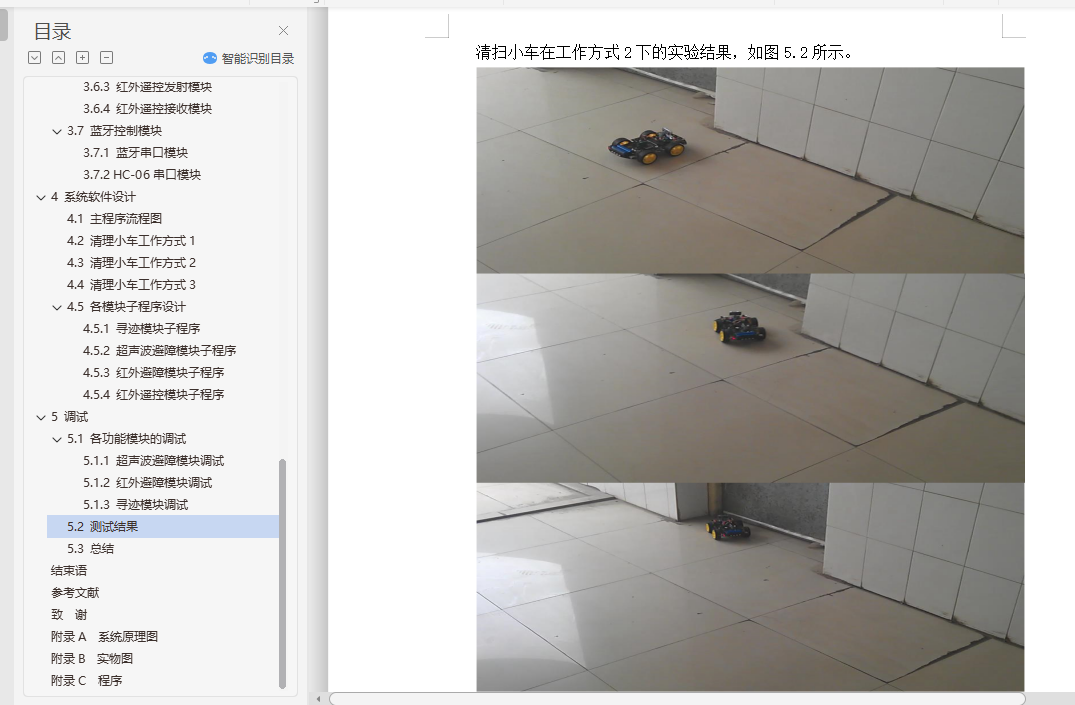
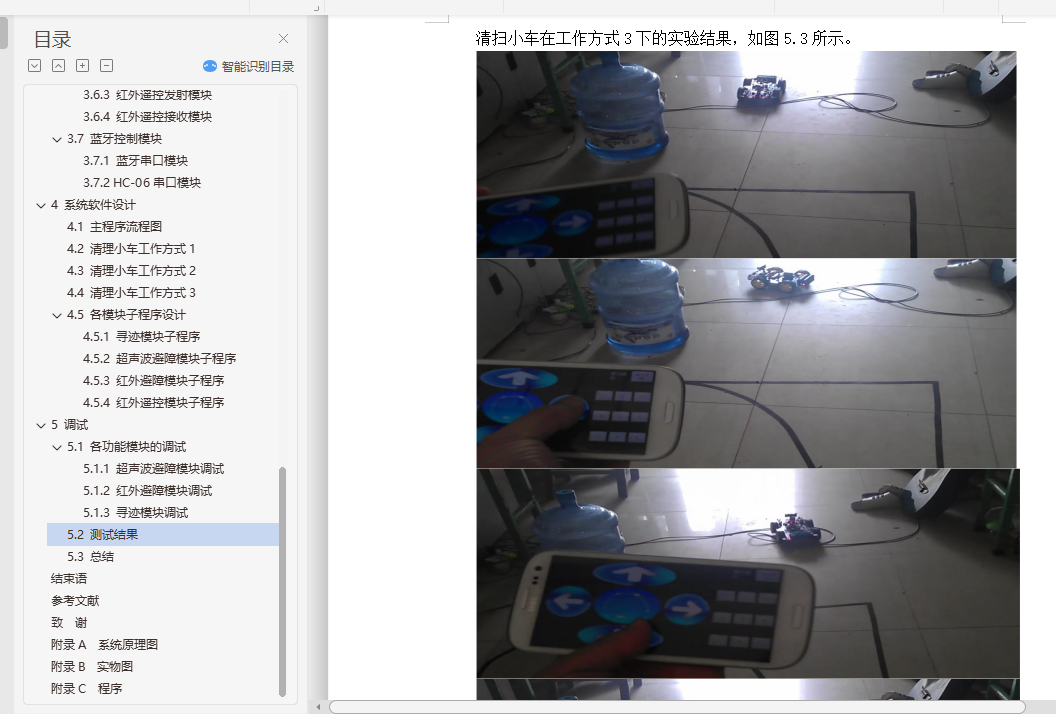
5.2 测试结果 44
5.3 总结 48
结束语 49
参考文献 50
致 谢 52
附录A 系统原理图 53
附录B 实物图 54
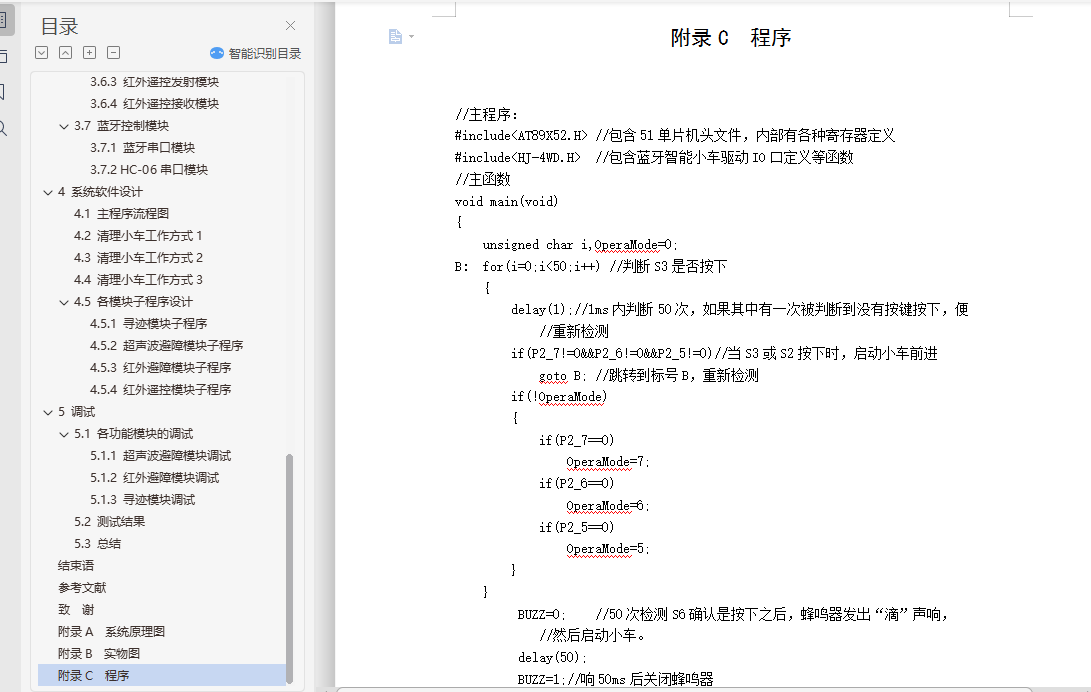
附录C 程序 55