ժ Ҫ
��������ʶ�����̽������Ĺ����У���������������ĵط��Ϳ���Σ������������ȫ�ĵط���������̽�⡢ս���������Ѿ�Ԯ�ȡ����������˵ij���Ϊ��������Ľ���ṩ��һ����֮��Ч��;������������������ڶ��ӵĵ��λ����±��ֳ����õ���Ӧ�ԣ�ʹ�ö�����������˵��о�������̽������Ѿ�Ԯ��������о�������Ҫ����������ʵ���塣
���������������Ϊ���͵Ķ������������֮һ�������ϵͳ���о�����Ϊ������������˵��о��ṩ�ο���
��1�����ķ�����������������˵Ĺ������о���ʷ����״�����������ĵ���Ҫ�о����ݡ�
��2�������������������ṹ���˶�������������������������˵ļṹģ�͡��о���������������˵����㲽̬����ϸ������ֱ�����߲�̬��ת�䲽̬��
��3������һƬʽ�����������Ʋ�������������������˵�Ӳ������ϵͳ��ϵͳ�������õ��ȶ��ԺͿ���չ�ԡ�
��4������Keil uVision3��д��������������˿���ϵͳ�ij���ͨ�����롢���桢���ԣ�ʵ���˶�������������˵Ŀ��ơ�
��5����������������˽��н�ģ��ʹ��Matlab����ϵͳ���档���Գ��������ֲ��ʵ����������������˵ĸ�ʵʱ�Ժ���Ӧ�ԵIJ�̬���ơ�
�������Ϲ����������������������˿���ϵͳ����ƺ�ʵ�֡�
�ؼ��ʣ����㣻���������ˣ����ƣ���̬
Control and Implementation of a Hexapod Bionic Robot
Abstract
In the process of humans understanding and exploring the world, there are some places where humans can not reach or where is dangerous for human life, such as planetary exploration, battleground detection and disaster rescue and so on. Bionic robot provides an effective way to solve the above problems. Multi-legged bionic robot shows a good adaptability in rough terrain environment, which means the research on multi-legged bionic robot has an important theoretical and practical significance on research in the planetary exploration and disaster rescue areas.
As a typical kind of various multi-legged bionic robots, hexapod bionic robot��s control system��s research could provide reference for research on multi-legged bionic robot.
(1) Paper analyses hexapod bionic robot��s domestic and foreign research history and status, and gives the main research content of the paper.
(2) Based on the body structure and movement principles of a hexapod insect, we give a simplified model of hexapod bionic robot. We have a research three-legged gait on hexapod bionic robot, and have a detailed analysis on straight walking gait and turning gait.
(3) We use one-chip solution to design and make the hardware control system of hexapod bionic robot. The system has a good stability and scalability.
(4) We use Keil uVision3 to edit, compile, simulate and debug the software program of hexapod bionic robot��s control system. And we implement control of the hexapod bionic robot.
(5) We model for the hexapod bionic robot, and make a system simulation by Matlab. We transplant the program to the MCU and implement a highly real-time and highly adaptable control of the hexapod bionic robot.
Based on the above work, we completed the design and implementation of a hexapod bionic robot��s control system.
Key Words��Hexapod��Bionic Robot��Control��Gait
Ŀ ¼
ժ Ҫ I
Abstract II
1 �������� 1
1.1 ����������������˵ķ�չ��� 1
1.2 ����������������˵ķ�չ��� 2
1.3 ��������������о��д��ڵ����� 2
1.4 ������������˵ķ�չ���� 3
1.5 ���ĵ���Ҫ���� 3
1.6 �� 4
2 ������������˵Ľṹ�����벽̬�滮 5
2.1 �����˶�ԭ������ 5
2.2 �������������������ģ�ͺͳ�����ģ��֮��ıȽ� 6
2.3 ʹ��Inventor�������������������ʵ������ 8
2.4 ������������˵Ľṹ���� 9
2.5 ������������˵IJ�̬�滮 11
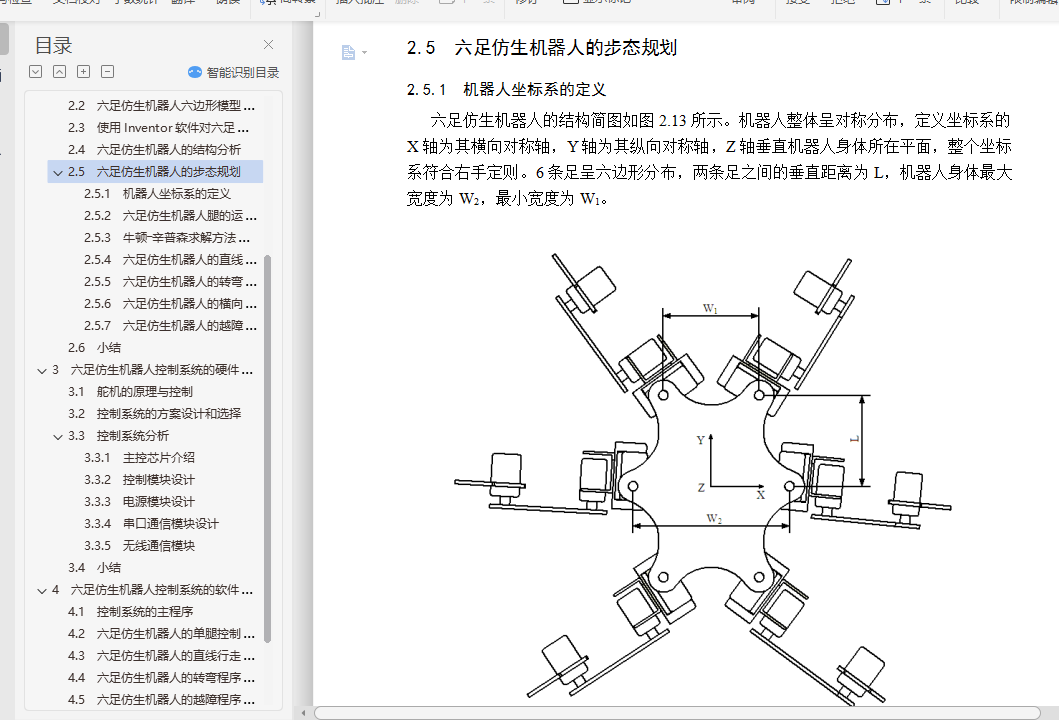
2.5.1 ����������ϵ�Ķ��� 11
2.5.2 ��������������ȵ��˶����� 12
2.5.3 ţ�٨D����ɭ��ⷽ�����˶�����е�Ӧ�� 14
2.5.4 ������������˵�ֱ�����߲�̬ 16
2.5.5 ������������˵�ת�䲽̬ 18
2.5.6 ������������˵ĺ������߲�̬ 19
2.5.7 ������������˵�Խ�ϲ�̬ 20
2.6 �� 22
3 ������������˿���ϵͳ��Ӳ����� 23
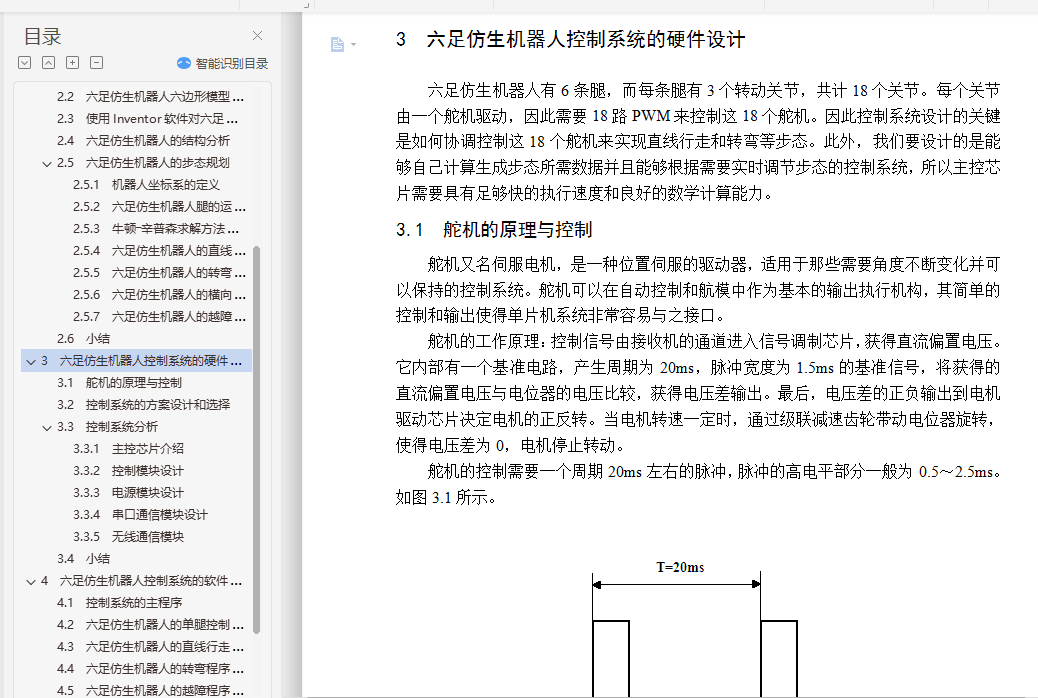
3.1 �����ԭ������� 23
3.2 ����ϵͳ�ķ�����ƺ�ѡ�� 24
3.3 ����ϵͳ���� 25
3.3.1 ����оƬ���� 25
3.3.2 ����ģ����� 27
3.3.3 ��Դģ����� 27
3.3.4 ����ͨ��ģ����� 28
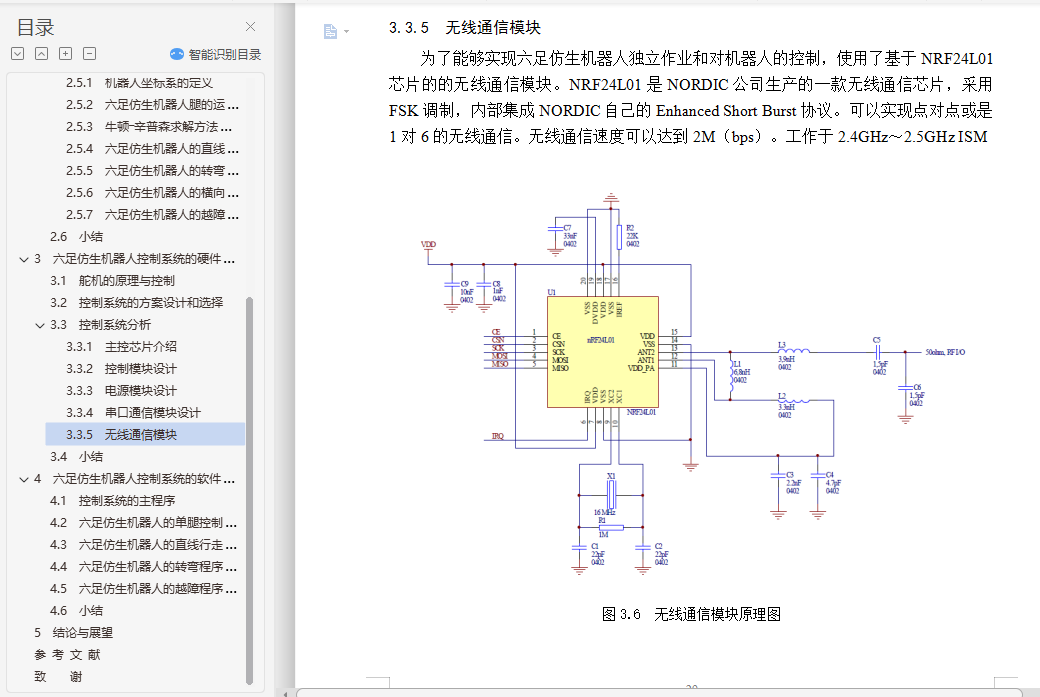
3.3.5 ����ͨ��ģ�� 29
3.4 �� 30
4 ������������˿���ϵͳ��������� 31
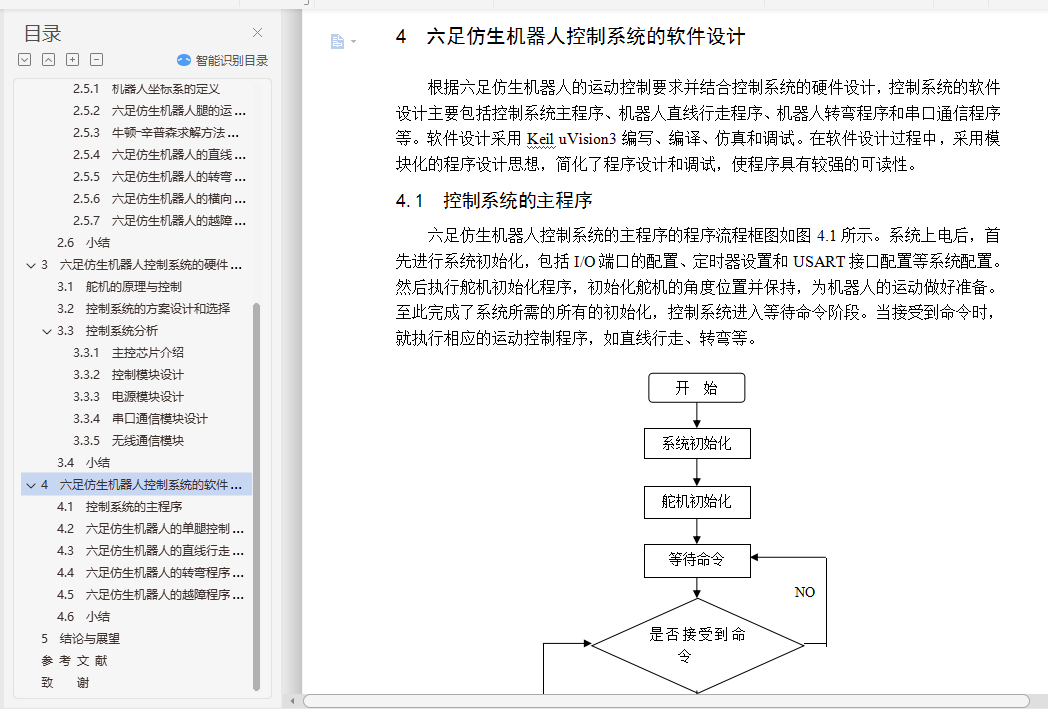
4.1 ����ϵͳ�������� 31
4.2 ������������˵ĵ��ȿ��Ƴ������ 32
4.3 ������������˵�ֱ�����߳������ 33
4.4 ������������˵�ת�������� 35
4.5 ������������˵�Խ�ϳ������ 36
4.6 �� 37
5 ������չ�� 38
�� �� �� �� 40
�� л 42