Abstract ― Smart home is expected to offer various intelligent services by recognizing residents along with their life style and feelings. One of the key issues for realizing the smart home is how to detect the locations of residents. Currently, the research effort is focused on two approaches: terminal-based and non-terminal-based methods. The terminal -based method employs a type of device that should be carried by the resident while the non-terminal-based method requires no such device. This paper presents a novel non-terminal-based approach using an array of pyroelectric infrared sensors (PIR sensors) that can detect residents. The feasibility of the system is evaluated experimentally on a test bed.
Index Terms ― smart home, location-based service, pyroelectric infrared sensor (PIR sensor), location-recognition algorithm.
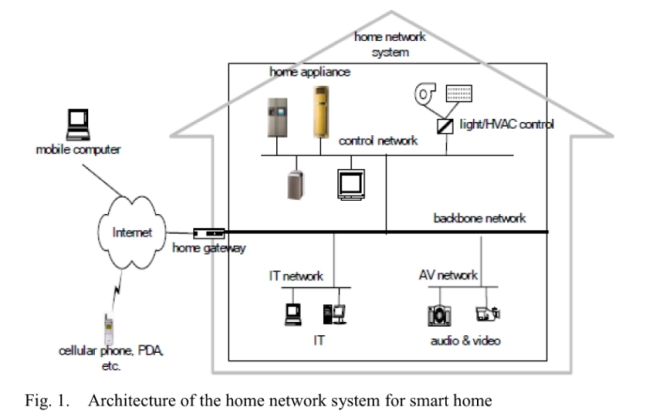
I.INTRODUCTION There is a growing interest in smart home as a way to offer a convenient, comfortable, and safe residential environment. In general, the smart home aims to offer appropriate intelligent services to actively assist in the resident’s life such as housework, amusement, rest, and sleep. Hence, in order to enhance the resident’s convenience and safety, devices such as home appliances, multimedia appliances, and internet appliances should be connected via at home network system, as shown in Fig. 1, and they should be controlled or monitored remotely using a television (TV) or personal digital assistant (PDA).
 Especially, attention has been focused on location-based services as a way to offer high-quality intelligent services, while considering human factors such as pattern of living, health, and feelings of a resident. That is, if the smart home can recognize the resident’s pattern of living or health, then home appliances should be able to anticipate the resident’s needs and offer appropriate intelligent service more actively.
Especially, attention has been focused on location-based services as a way to offer high-quality intelligent services, while considering human factors such as pattern of living, health, and feelings of a resident. That is, if the smart home can recognize the resident’s pattern of living or health, then home appliances should be able to anticipate the resident’s needs and offer appropriate intelligent service more actively.
For example, in a passive service environment, the resident controls the operation of the HVAC (heating, ventilating, and air conditioning) system, while the smart home would control the temperature and humidity of a room according to the resident’s condition. Various indoor location-aware systems have been developed to recognize the resident’s location in the smart home or smart office. In general, indoor location-aware systems have been classified into three types according to the measurement technology: triangulation, scene analysis, and proximity methods [8]. The triangulation method uses multiple distances from multiple known points. Examples include Active Badges, Active Bats, and Easy Living, which use infrared sensors, ultrasonic sensors, and vision sensors, respectively. The scene analysis method examines a view from a particular vantage point. Representative
examples of the scene analysis method are MotionStar , which uses a DC magnetic tracker, and RADAR [13], which uses IEEE 802.11 wireless local area network (LAN). Finally, the proximity method measures nearness to a known set of points. An example of the proximity method is Smart Floor [14], which uses pressure sensors.
Alternatively, indoor location-aware systems can be classified according to the need for a terminal that should be carried by the resident. Terminal-based methods, such as Active Bats, do not recognize the resident’s location directly, but perceive the location of a device carried by the resident, such as an infrared transceiver or radio frequency identification (RFID) tag. Therefore, it is impossible to recognize the resident’s location if he or she is not carrying the device. In contrast, non-terminal methods such as Easy Living and Smart Floor can find the resident’s location without such devices. However, Easy Living can be regarded to invade the resident’s privacy while the Smart Floor has difficulty with extendibility and maintenance. This paper presents a non-terminal based location-aware system that uses an array of pyroelectric infrared (PIR) sensors . The PIR sensors on the ceiling detect the presence of a resident and are laid out so that detection areas of adjacent sensors overlap. By combining the outputs of multiple PIR sensors, the system is able to locate a resident with a reasonable degree of accuracy. This system has inherent advantage of non-terminal based methods while avoiding privacy and extendibility, maintenance issues. In order to demonstrate its efficacy, an experimental test bed has been constructed, and the proposed system has been evaluated experimentally under various experimental conditions. This paper is organized into four sections, including this introduction. Section II presents the architecture of the PIR sensor-based indoor location-aware system (PILAS), and the location-recognition algorithm. Section III describes a resident-detection method using PIR sensors, and evaluates the performance of the system under various conditions using an experimental test bed. Finally, a summary and the conclusions are presented in Section IV.
II.ARCHITECTURE OF THE PIR SENSORBASED INDOOR LOCATIONAWARE SYSTEM Given
the indoor environment of the smart home, an indoor location-aware system must satisfy the following requirements. First, the location-aware system should be implemented at relatively low cost because many sensors have to be installed in rooms of different sizes to detect the resident in the smart home. Second, sensor installation must be flexible because the shape of each room is different and there are obstacles such as home appliances and furniture, which prevent the normal operation of sensors. The third requirement is that the sensors for the location-aware system have to be robust to noise, and should not be affected by their surroundings. This is because the smart home can make use of various wireless communication methods such as wireless LAN or radio-frequency (RF) systems, which produce electromagnetic noise, or there may be significant changes in light or temperature that can affect sensor performance. Finally, it is desirable that the system’s accuracy is adjustable according to room types.
Among many systems that satisfy the requirement, the PIR sensor-based system has not attracted much attention even though the system has several advantages. The PIR sensors,which have been used to turn on a light when it detects human movement, are less expensive than many other sensors. In addition, because PIR sensors detect the infrared wavelengthemitted from humans between 9.4~10.4 μm, they are reasonably robust to their surroundings, in terms of temperature, humidity, and electromagnetic noise. Moreover, it ispossible to control the location accuracy of the system by adjusting the sensing radius of a PIR sensor, and PIR sensors are easily installed on the ceiling, where they are not affected by the structure of a room or any obstacles.
Figure 2 shows the framework for the PILAS in a smart home that offers location-based intelligent services to a resident. Within this framework, various devices are connected via a home network system, including PIR sensors, room terminals, a smart home server, and home appliances. Here, each room is regarded as a cell, and the appropriate number of PIR sensors is installed on the ceiling of each cell to provide sufficient location accuracy for the location-based services. Each PIR sensor attempts to detect the resident at a constant period, and transmits
its sensing information to a room terminal via the home network system.
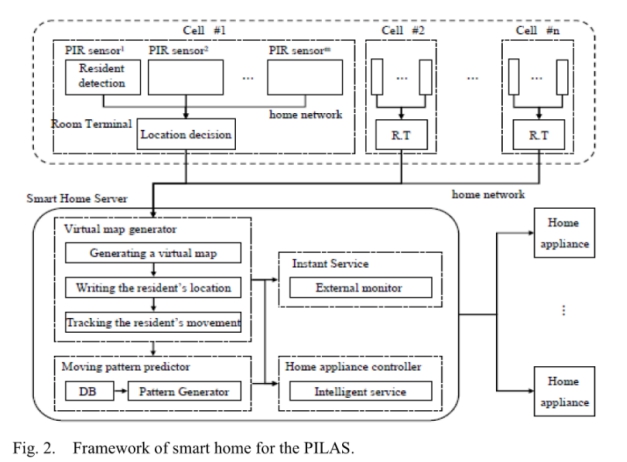
Consequently, the room terminal recognizes the resident’s location by integrating the sensor information received from all of the sensors belonging to one cell, and transmits the resident’s location to the smart home server that controls the home appliances to offer location-based intelligent services to the resident. Within this framework, the smart home server has the following functions. 1) The virtual map generator makes a virtual map of the smart home (generating a virtual map), and writes the location information of the resident, which is received from a room terminal, on the virtual map (writing the resident’s location). Then, it makes a moving trajectory of
the resident by connecting the successive locations of the resident (tracking the resident’s movement). 2) The home appliance controller transmits control commands to home appliances via the home network system to provide intelligent services to the resident. 3) The moving pattern predictor saves the current movement trajectory of the resident, the current action of home appliances, and parameters reflecting the current home environment such as the time, temperature, humidity, and illumination. After storing sufficient information, it may be possible to offer human-oriented intelligent services in which the home appliances spontaneously provide services to satisfy human needs. For example, if the smart home server “knows” that the resident normally wakes up at 7:00 A.M. and takes a shower, it may be possible to turn on the lamps and some music. In addition, the temperature of the shower water can be set automatically for the resident.
