摘 要
机械手对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。工业机械手可以代替人手进行繁重的劳动,显著减轻工人的劳动强度,改善劳动条件,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,更能提高劳动生产率和自动化水平。随着现代生产的机械化和自动化的发展,对机器人的需求越来越大,因而对机器人的末端执行机构机械手的研究尤为重要。一些软件的发展为机械手的设计分析提供了方便,降低了生产成本,本设计是基于SolidWorks软件,使得设计效率大大提高。运用Solidworks技术对上料机械手进行三维实体造型,并进行了运动仿真,使其能将基本的运动更具体的展现在人们面前。它能实行自动上料运动;在安装工件时,将工件送入卡盘中的夹紧运动等。上料机械手的运动速度是按着满足生产率的要求来设定。
本文是为普通车床配套而设计的上料机械手。它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的向动化技术设备。
关键字:机械手,AutoCAD,Solidworks
Abstract
The manipulator plays an important role in realizing the automation of industrial production and promoting the further development of industrial production. The industrial manipulator can replace the manpower to carry on the heavy work, obviously reduces the worker's labor intensity, improves the working condition, can operate in the harmful environment to protect the personal safety, therefore is widely used in the machinery manufacture, the metallurgy, the electronics, the light industry and the atomic energy and so on department, can increase the labor productivity and the automation level. With the development of mechanization and automation of modern production, the demand for robots is increasing, so it is very important to study the end actuator manipulator of robots. The development of some software into manipulator setup Computer analysis provides convenience and reduces production cost. This design is based on SolidWorks software, which makes the design efficiency greatly improved. By using Solidworks technology, the three-dimensional solid modeling of feeding manipulator is carried out, and the motion simulation is carried out, so that the basic motion can be displayed more concretely in front of people. It can carry out automatic feeding movement; when installing the workpiece, the workpiece is fed into the clamping motion in the chuck, etc. The speed of the feeding manipulator is set to meet the productivity requirements.
This paper is designed for general lathe matching feeding manipulator. It is a kind of equipment that mimics the partial function of human upper limb and carries workpiece or grip tool to operate according to predetermined requirement.
Keywords: manipulator, AutoCAD,Solidworks
目 录
摘 要 I
Abstract II
一、引言 1
(一)毕业设计目的 1
(二)本课题的内容和要求 1
1.原始数据及资料 1
2.料槽形式及分析动作要求 2
二、机械手的组成与分类 4
(一)机械手组成 4
(二)机械手分类 5
三、机械手抓取机构设计 7
(一)手部设计计算 7
(二)腕部设计计算 10
(三)臂伸缩机构设计 12
四、机械手液压系统原理设计及草图 16
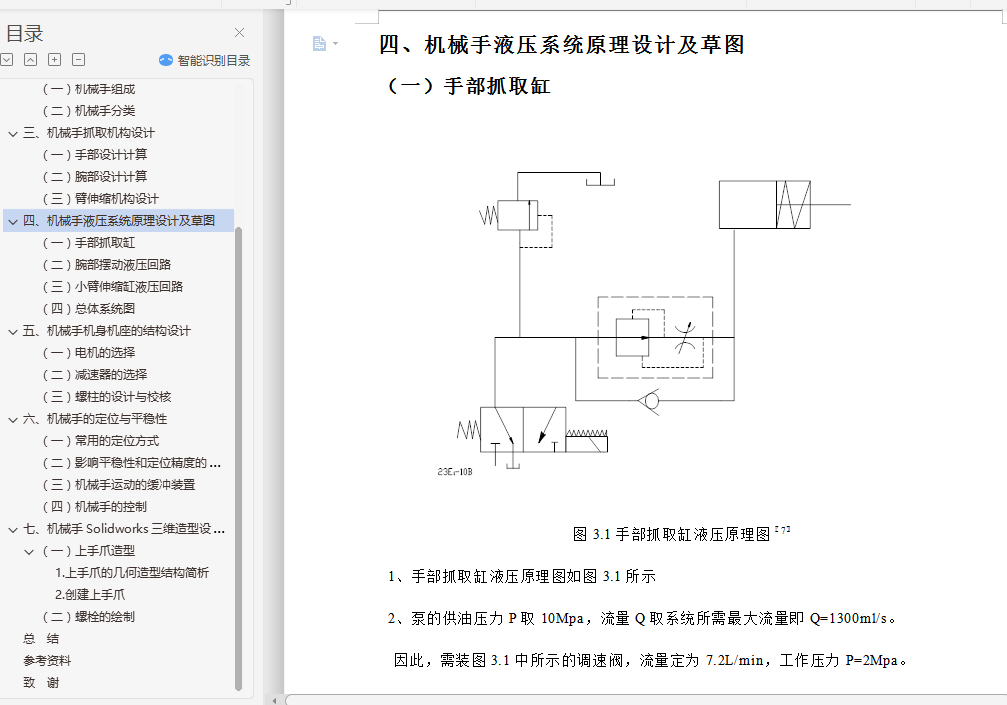
(一)手部抓取缸 16
(二)腕部摆动液压回路 17
(三)小臂伸缩缸液压回路 18
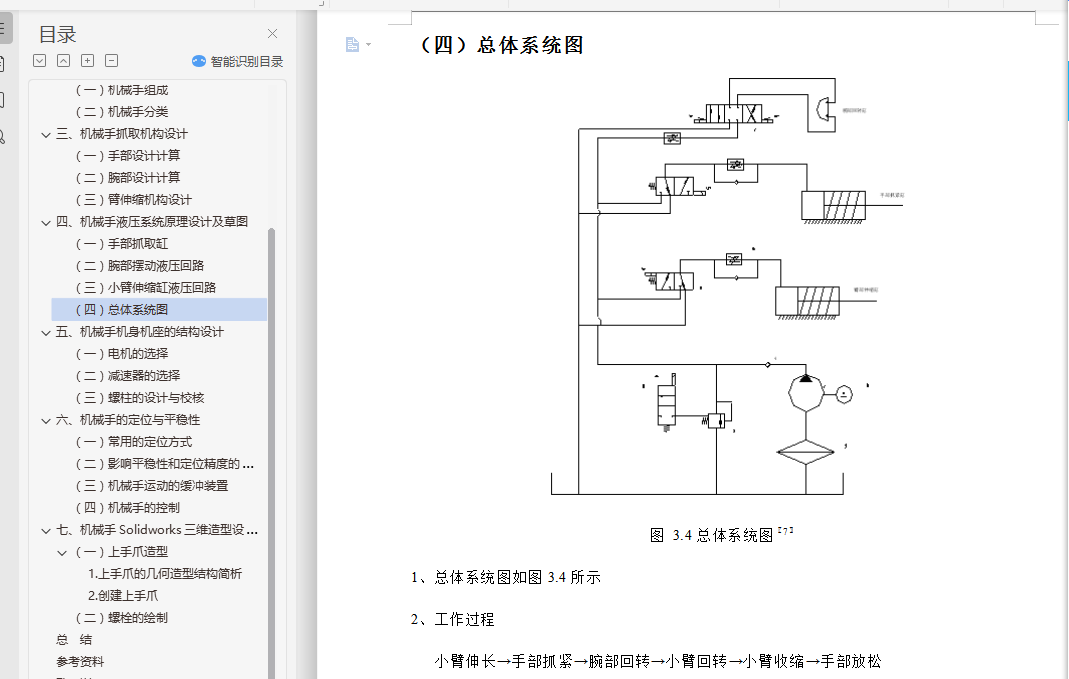
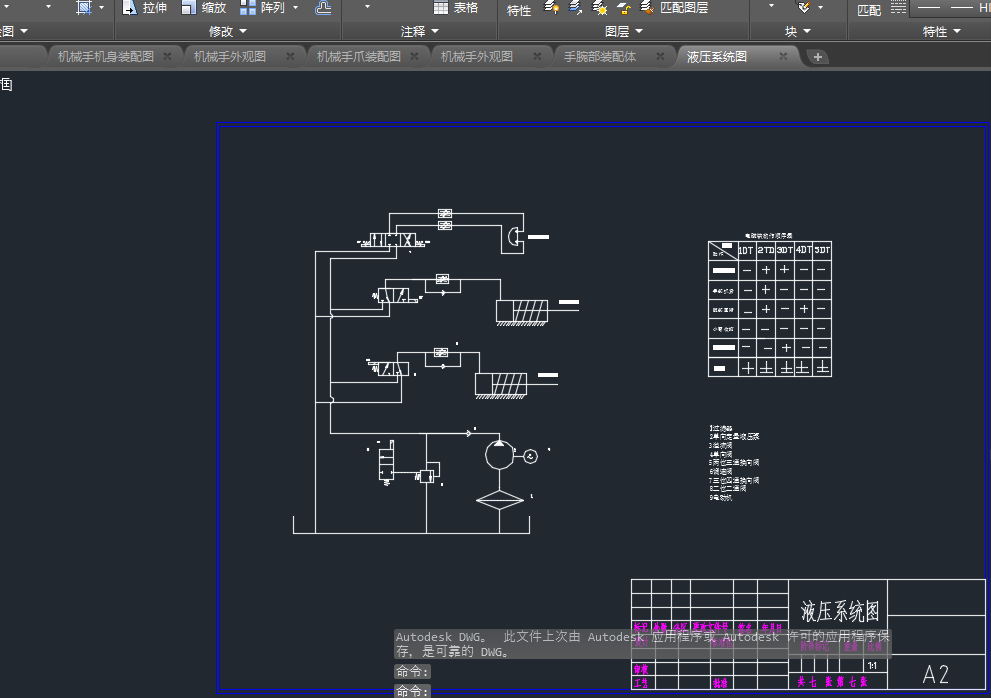
(四)总体系统图 19
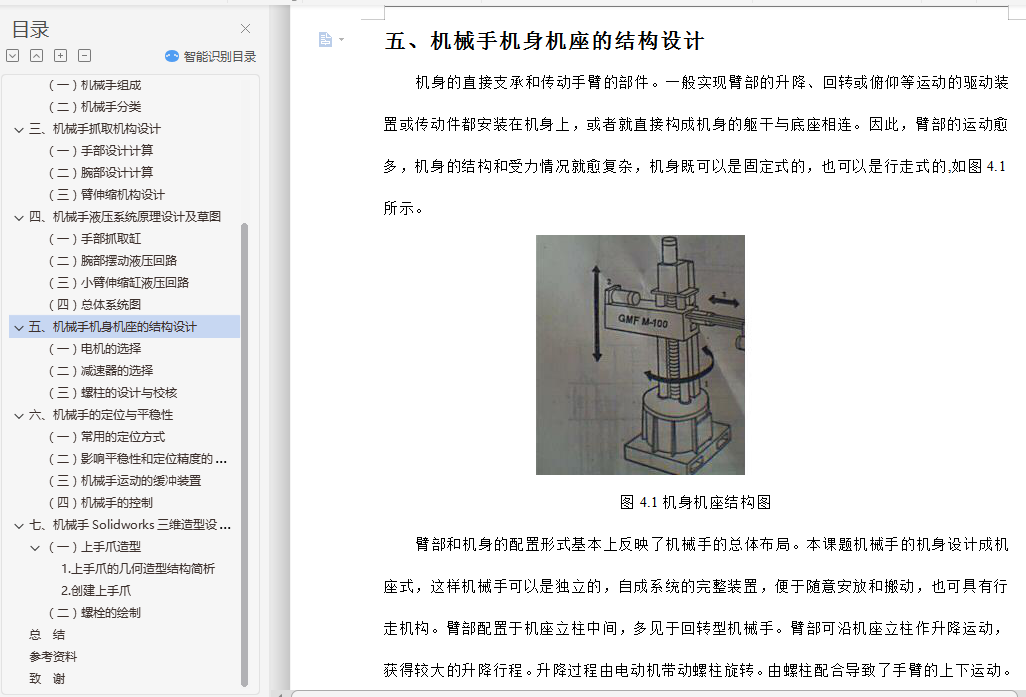
五、机械手机身机座的结构设计 21
(一)电机的选择 21
(二)减速器的选择 23
(三)螺柱的设计与校核 23
六、机械手的定位与平稳性 26
(一)常用的定位方式 26
(二)影响平稳性和定位精度的因素 26
(三)机械手运动的缓冲装置 27
(四)机械手的控制 28
七、机械手Solidworks三维造型设计 30
(一)上手爪造型 31
1.上手爪的几何造型结构简析 31
2.创建上手爪 32
(二)螺栓的绘制 36
总 结 41
参考资料 42
致 谢 43