摘 要
热镦工艺通常是通过对将加工的材料加热到一定的温度,通过冲头,在液压系统驱动下,对加工材料的高强度冲压,对其材料内部发生塑性变形,达到要求的形状尺寸,相对于冷镦加工而言,热镦加工所需的冲压力更小,更易于成型,成型零件的内应力更小,热镦加工工艺通常对于熔点较高,强度,硬度较高的材料进行加工。
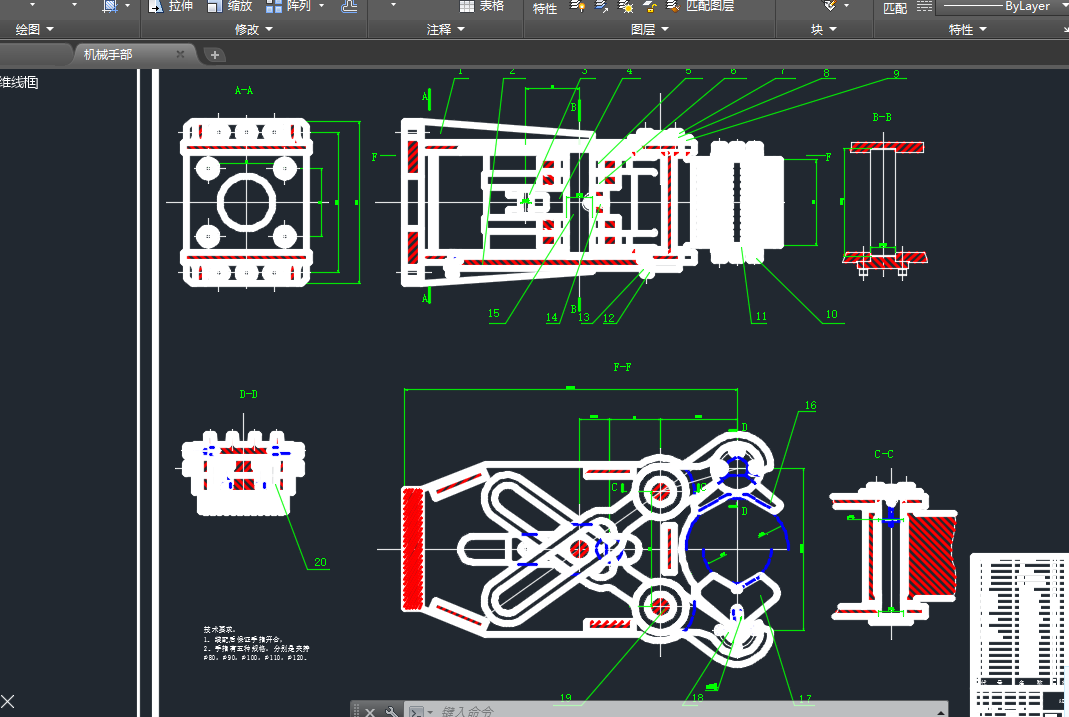
本论文介绍了用于螺母热镦装置加持机械手的设计。它采用液压驱动,动作平稳,控制方便。主要阐述该螺母热镦装置加持机械手的升降和回转的设计和计算。首先从螺母热镦装置加持机械手的基础知识介绍有关螺母热镦装置加持机械手的组成、分类、臂部设计,液压控制的多种方案,再从本次设计所要求的功能原理设计开始,对于不同的方案加以比较和论证,从中可确定出最优方案,并采用其方案。着重阐述了机身的设计,具体阐述了螺母热镦装置加持机械手的设计原则和步骤,分析了设计时应注意的问题,并对螺母热镦装置加持机械手的平稳性及定位精度给予详细的论述。设计并分析了该螺母热镦装置加持机械手所用的液压控制的方法和过程。
夹持机械手夹持部分能够在高温环境下正常工作。 夹持机械手的夹持力必须要保证足够大,可以稳定夹紧工件进行加工。夹持机械手必须要保证送料定位准确,以确保热镦加工的正常进行。 夹持机械手必须要工作效率高,送料取料速度快,从而保证大批量的高效生产。
关键词:螺母热镦装置;加持机械手;液压;驱动力
Abstract
Hot upsetting process is usually by heating the processed material to a certain temperature,through punching,driven by hydraulic system,high strength stamping of the processed material,plastic deformation within its material to meet the required shape size. Compared with cold upsetting,hot upsetting process requires less stamping force and easier molding,less internal stress of formed parts. Hot upsetting process is usually processed for materials with higher melting point,strength and hardness.
This paper introduces the design of a manipulator for nut hot upsetting device. It adopts hydraulic drive,smooth operation and convenient control. This paper mainly describes the design and calculation of lifting and turning of the nut hot upsetting device. First of all,from the basic knowledge of nut hot upsetting device holding manipulator,this paper introduces the composition,classification,arm design,hydraulic control of nut hot upsetting device holding manipulator,and then from the design of functional principles required by this design,the comparison and demonstration of different schemes,from which the optimal scheme can be determined,and its scheme can be adopted. The design of the fuselage is emphasized,and the hot upsetting of the nut is described in detail The design principles and steps of the mounting manipulator are analyzed,and the problems that should be paid attention to in the design are discussed in detail. The method and process of hydraulic control for the nut hot upsetting device is designed and analyzed.
The clamping part of the gripper manipulator can work normally under high temperature environment. The clamping force of the clamping manipulator must be large enough to stabilize the clamping workpiece for processing. The clamping manipulator must ensure that the feeding position is accurate to ensure the normal operation of hot upsetting processing. The clamping manipulator must have high working efficiency and fast feeding speed,so as to ensure high efficiency production in large quantities.
Keywords: nut hot upsetting device;holding manipulator;hydraulic;driving force
目 录
1绪论 1
1.1选题背景及意义 1
1.2研究现状 1
1.2.1机械手国内外发展现状 1
1.2.2机械手构成与分类 3
1.2.3机械手夹持器的应用现状 3
1.2.4发展前景及方向 4
1.3研究主要内容 5
2螺母热镦装置加持机械手总体设计 6
2.1螺母热镦装置加持机械手的分类 6
2.2螺母热镦装置加持机械手的组成 7
2.3螺母热镦装置加持机械手的自由度和坐标形式 8
2.3.1螺母热镦装置加持机械手的自由度 8
2.3.2螺母热镦装置加持机械手的几种坐标形式 10
2.4螺母热镦装置加持机械手的动作和规格参数 10
2.4本章小结 11
3螺母热镦装置加持机械手部件设计 12
3.1手部设计 12
3.1.1手部设计要求 12
3.1.2手部的结构 12
3.1.3夹持式手爪的计算 13
3.2臂部设计 15
3.2.1臂部组成 15
3.2.2臂部设计要求 15
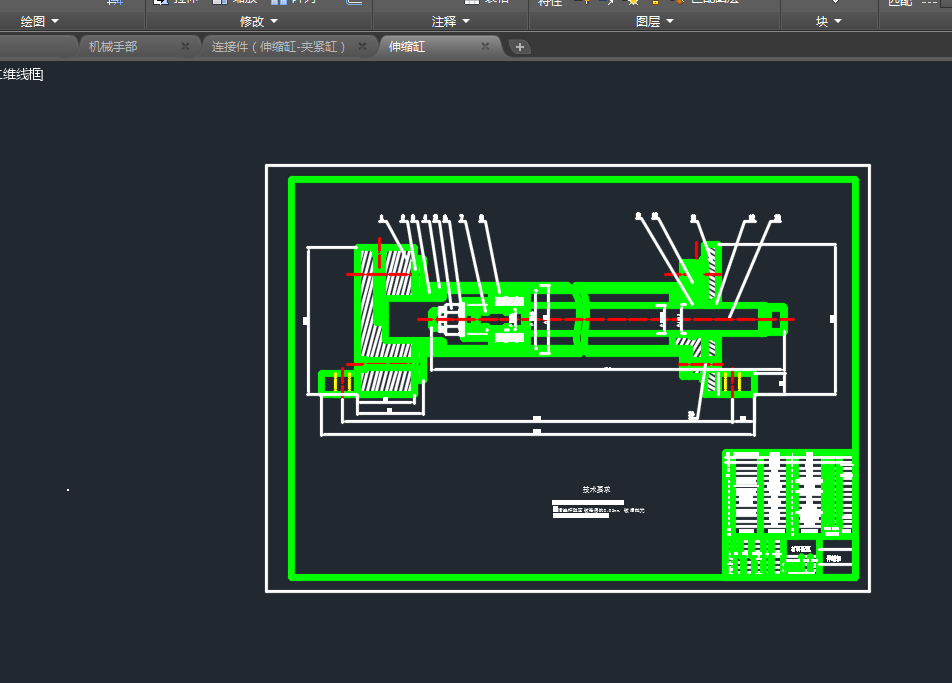
3.2.3臂部伸缩运动结构 16
3.2.4臂部伸缩油缸的计算 17
3.3手部升降部分设计 18
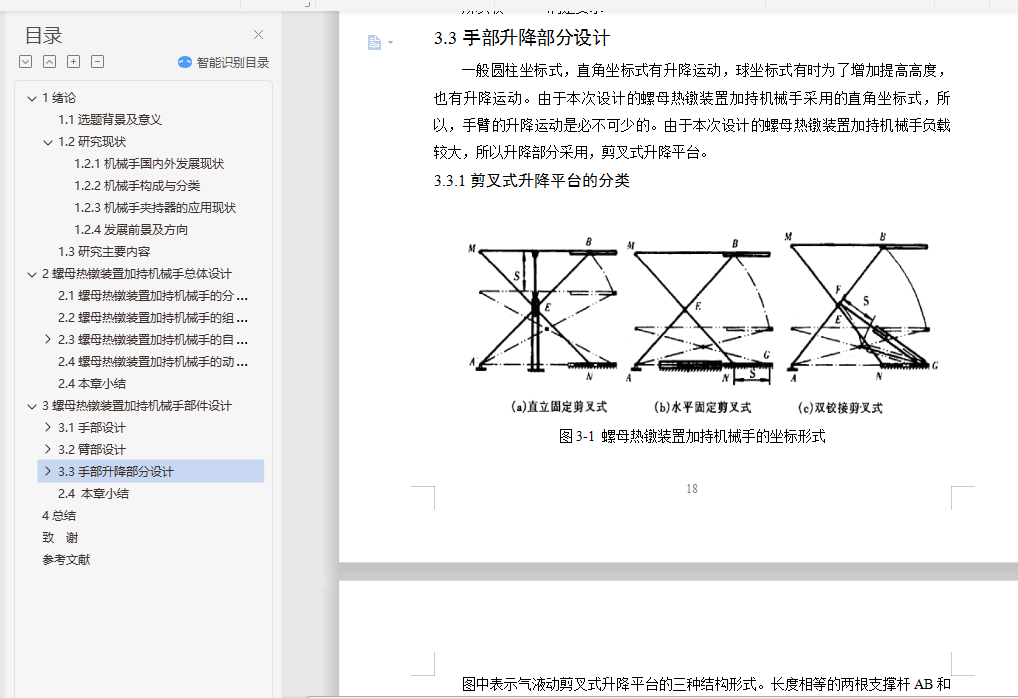
3.3.1剪叉式升降平台的分类 18
3.3.2双铰接剪叉式升降平台机构的位置参数计算 19
3.3.3双铰接剪叉式升降平台机构的运动参数计算 21
3.3.4双铰接剪叉式升降平台机构的动力参数计算 22
3.3.5剪叉式升降平台机构设计时应注意的问题 22
3.3.6双铰接剪叉式升降平台液压缸的计算 23
3.3.7台板的设计计算 24
3.3.8叉杆的设计计算 25
2.4 本章小结 30
4总结 31
致 谢 32
参考文献 33