摘 要
在城市里,楼梯是人造环境中最常见的障碍,也是最难跨越的障碍之一。因此,装置的爬梯能力是移动装置的重要越障性能指标。通过加载不同的仪器设备,装置可广泛用于危险环境探查、救灾、助残、搬运等作业,其应用价值巨大。
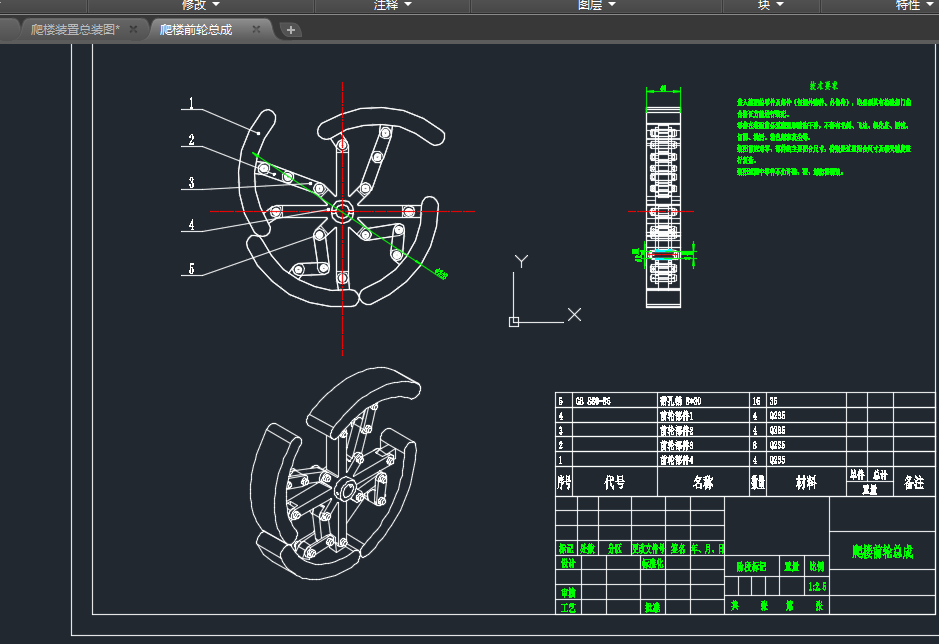
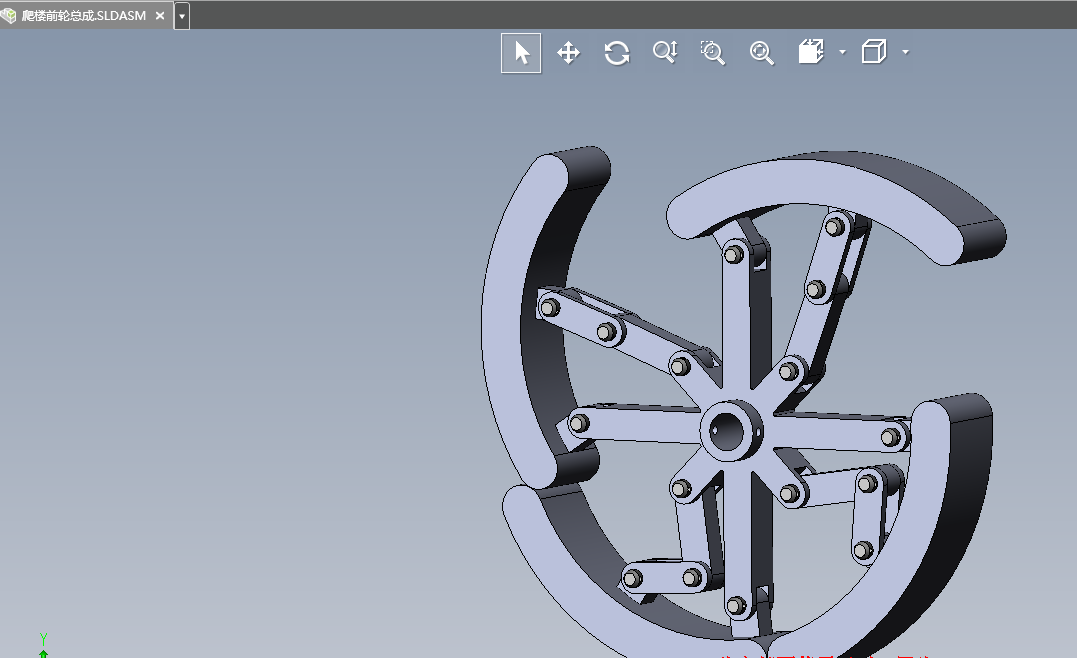
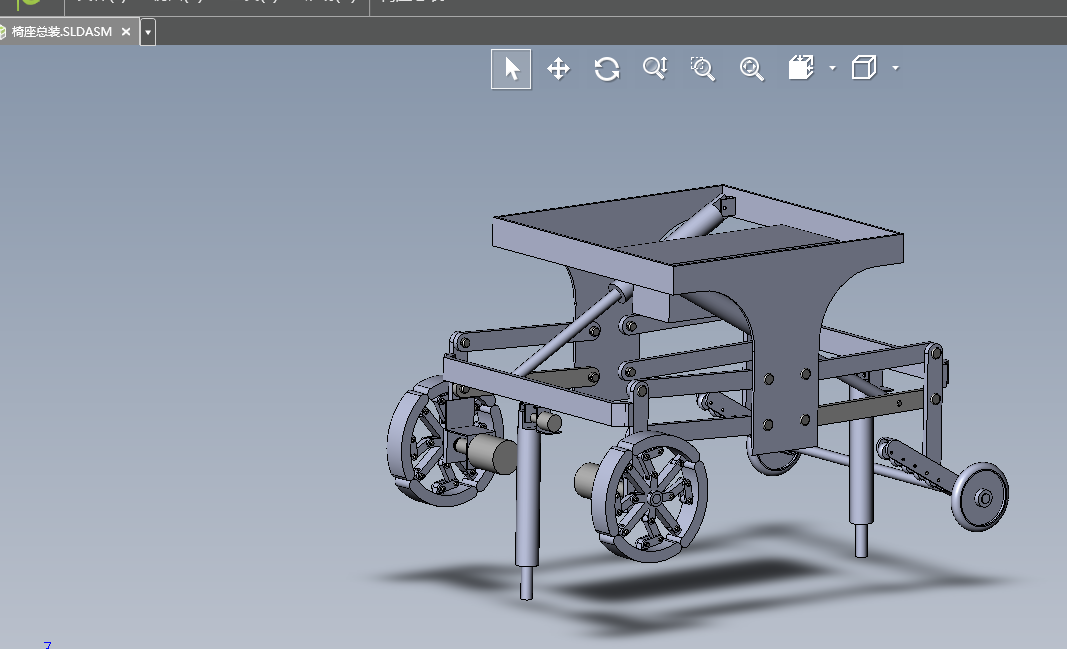
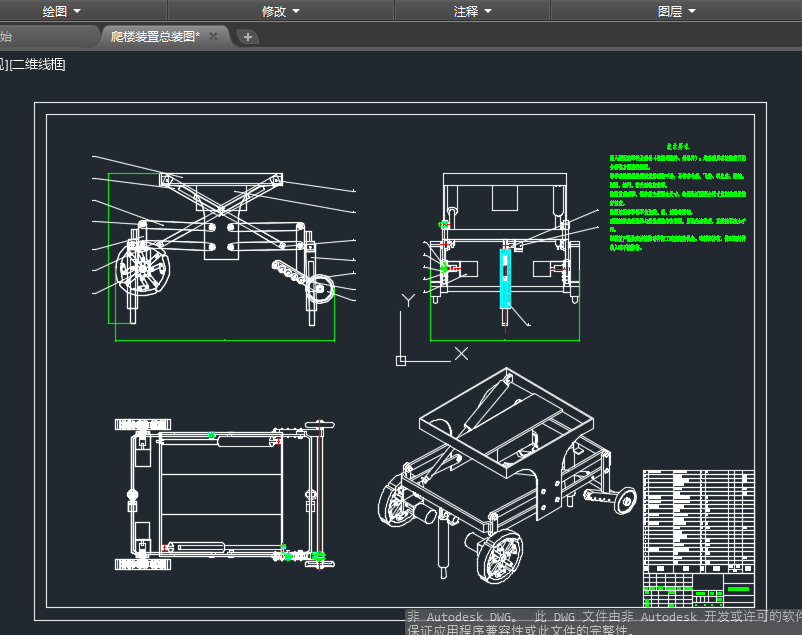
本次设计对一种新型爬楼装置进行了结构设计。新型爬楼装置需要能够运送重物并且能够以一定速度上下楼梯,这就要求设计出符合要求的爬楼机构、下楼机构、能保持水平机座。在本次设计中爬楼机构采用的是一个在平路上行走时,可变轮收缩成跟普通轮一样的轮子,可在平稳的路面上行驶。当爬楼梯时,爬升爪张开,通过爪与楼梯接触,使整个车架上升,从而完成爬楼过程。可变轮采用双电机结构,正常时,两个电机工作状态相同,当需要转弯时,通过控制电机,使两轮转速一大一小来实现转弯。本中设计中的新型爬楼装置结构简洁合理而且十分紧凑,符合设计说明书提出的各项技术要求,能满足生产实践的需要。运用Solidworks三维设计软件以及cad绘图软件进行了三维设计并且绘制了二维工程图纸。
关键词:爬楼专职;结构设计;爬楼机构;双电机结构;创新设计
Abstract
In cities,stairs are the most common obstacle in artificial environment and one of the most difficult obstacles to cross. Therefore,the climbing ability of the device is an important obstacle crossing performance index of the moving device. By loading different instruments and equipment,the device can be widely used in dangerous environment exploration,disaster relief,disability assistance,handling and other operations,its application value is huge.
This design has carried on the structure design to a new type climbing device. The new climbing device needs to be able to carry heavy objects and can go up and down stairs at a certain speed,which requires the design of a climbing mechanism that meets the requirements,a lower building mechanism,and a horizontal machine seat. In this design,the climbing mechanism uses a flat road when walking,the variable wheel shrinks to the same wheel as the ordinary wheel,can travel on a smooth road. When climbing the stairs,the climbing claw opens and contacts with the stairs through the claws to make the whole frame rise,thus completing the climbing process. Variable wheel adopts double motor structure,when normal,the two motors work in the same state,when need turn. When,by controlling the motor,make two wheels rotate speed one big one small to achieve turn. The structure of the new climbing device in this design is simple,reasonable and compact,which meets the technical requirements of the design specification and can meet the needs of production practice. The Solidworks 3D design software and cad drawing software are used to carry out 3D design and draw 2D engineering drawings.
Keywords: full-time climbing;structural design;climbing mechanism;double motor structure;innovative design
目 录
1绪论 1
1.1 选题背景及意义 1
1.2 发展现状 1
1.3 本文爬楼方案的研发思路 2
1.4 研究主要内容 3
2新型爬楼装置总体设计 4
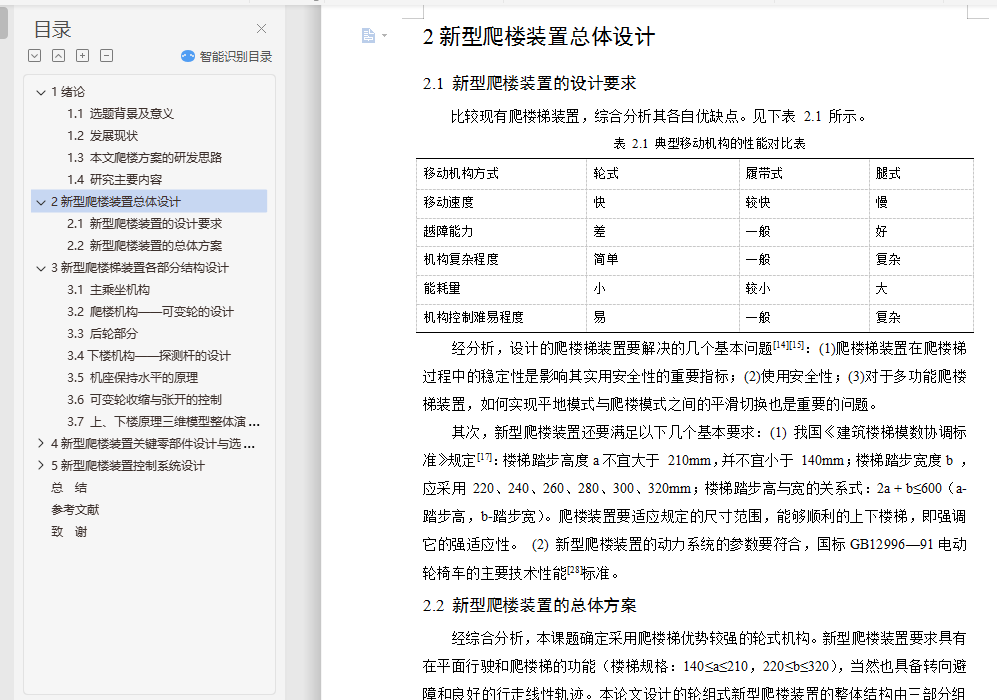
2.1 新型爬楼装置的设计要求 4
2.2 新型爬楼装置的总体方案 4
3新型爬楼梯装置各部分结构设计 6
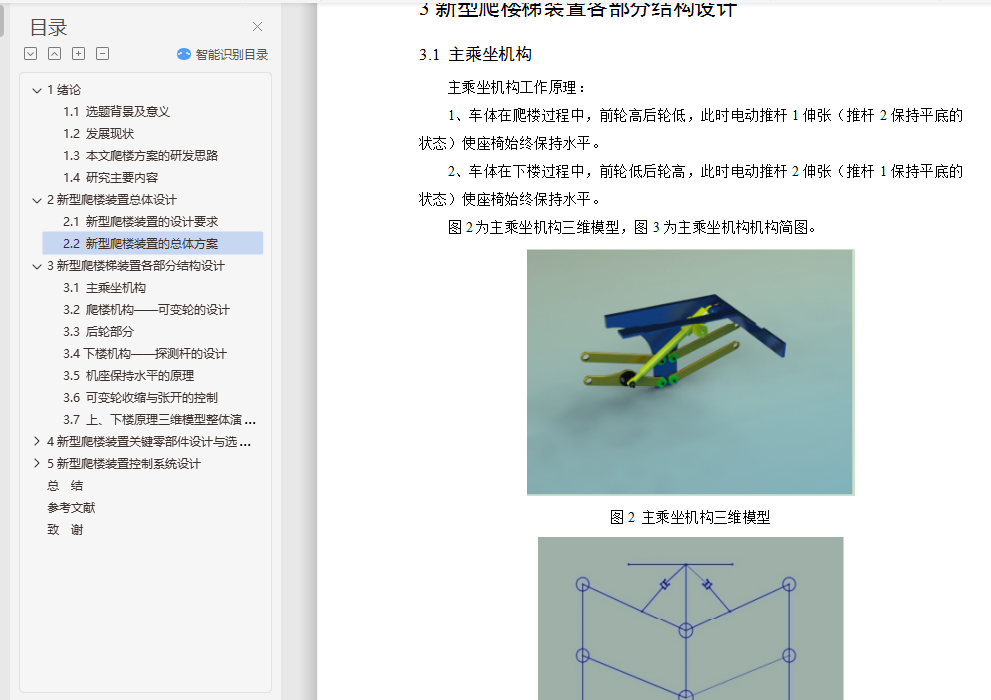
3.1 主乘坐机构 6
3.2 爬楼机构――可变轮的设计 7
3.3 后轮部分 8
3.4下楼机构――探测杆的设计 8
3.5 机座保持水平的原理 9
3.6 可变轮收缩与张开的控制 9
3.7 上、下楼原理三维模型整体演示 10
4新型爬楼装置关键零部件设计与选型 12
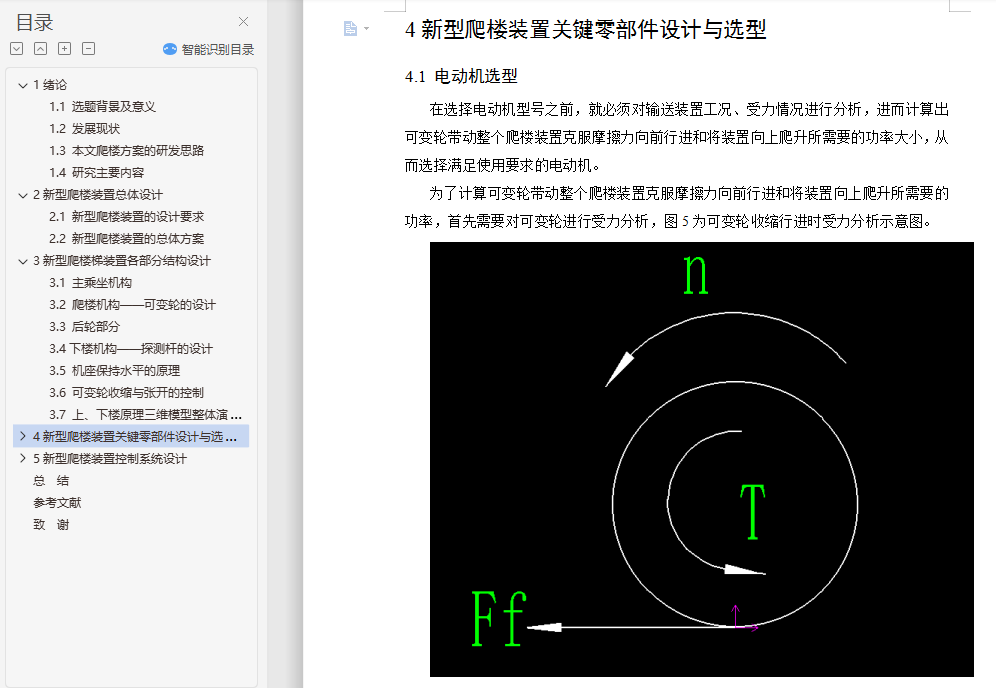
4.1 电动机选型 12
4.2 输送装置减速机选型 13
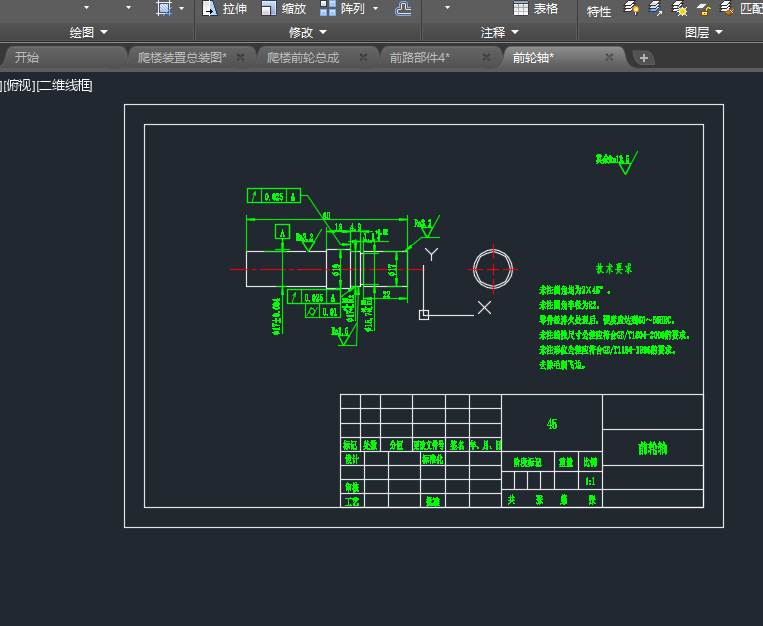
4.3 传动轴的设计 14
4.3.1轴的设计与校核 14
4.3.2求轴上的载荷 15
4.3.3按弯矩合成应力校核轴的强度 18
4.4 爬楼装置转向机构设计 18
4.4 爬楼装置结构设计 19
4.4.1轮组单元的结构设计 19
4.4.2爬楼装置零件组成及设计 21
4.5 新型爬楼装置行驶性能分析 21
4.5.1可跨越最大垂直障碍高度 21
4.5.2最小转弯半径 22
5新型爬楼装置控制系统设计 24
5.1 爬楼装置的控制目标 24
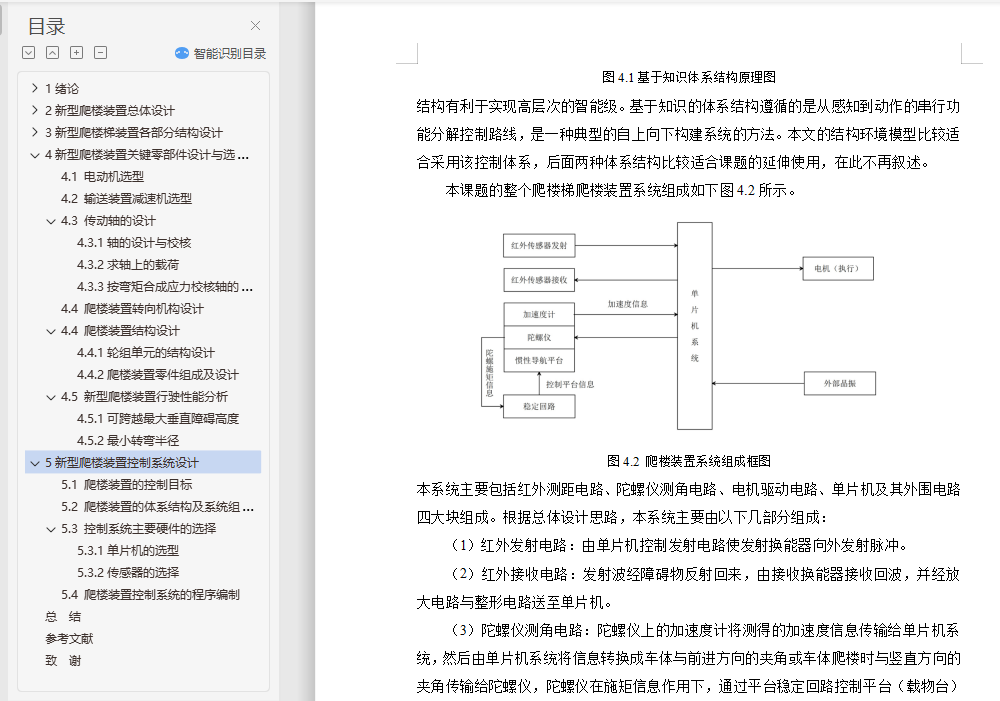
5.2 爬楼装置的体系结构及系统组成 24
5.3 控制系统主要硬件的选择 26
5.3.1单片机的选型 26
5.3.2传感器的选择 27
5.4 爬楼装置控制系统的程序编制 30
总 结 36
参考文献 37
致 谢 39