摘 要
四足机器人作为仿生机器人的一种,得到了广泛的研究。行走机构和转弯机构是四足机器人最关键的部分,目前,行走机构的研究大多采用在腿机构的关节处安装伺服电机进行驱动,增加了机器人的重量和控制策略的难度。并且,机器人本体大多是一个刚性整体,转弯机构研究不足。为此,项目将四足机器人本体作为一个柔性整体,采用三维建模软件Pro/E4.0设计了四足机器人的机械系统,提出了一种新颖的凸轮控制驱动式行走机构,设计了一种腿机构以及相应的凸轮控制驱动机构,并初步设计了柔性转弯机构。在此基础上,论文采用主从式控制方式设计了四足机器人的控制系统,重点讨论了以8051单片机为控制器的行走机构和转向机构的控制系统设计。
关键词:四足机器人;行走机构;凸轮驱动;控制系统;三维设计
Abstract
Quadruped robot as one of biomimetic robots, has been extensively studied. Travel agencies and institutions is a quadruped robot turning the key, At the present, servo motor is installed in the leg joints of the most travel agencies, increasing the weight of the robot and the difficulty of the control system strategy . And most of the robot is a rigid body as a whole, and the research of the turning institutions is not fully studied . For this purpose, the project will take four-legged robot whole body as a flexible rigid body, and three-dimensional modeling software Pro/E4.0 is used for designing quadruped robot mechanical systems, a new travel agency based on cam control drive is proposed , a kind of leg mechanism and control of the corresponding cam drive mechanism is designed, and a flexible turning institution is preliminary designed. Based on this work, the control system of the robot was designed. Especially, control systems of the stepped mechanism and the wheel mechanism were analyzed detailed.
Key words: quadruped robot; stepped mechanism; cam drive; control system ;three dimensional design;
目 录
1.引言 1
1.1机器人及其相关技术的发展 1
1.2国内外四足行走机器人得研究概况 2
1.3机器人学主要涉及的学科内容 4
1.4 课题简介 5
2.机器人系统总体设计 6
2.1机器人系统结构概述 6
2.2 四足机器人研发流程 7
2.3四足机器人系统结构设计 9
3.四足机器人机械系统的结构设计技术 10
3.1 机器人机械设计的内容及特点 10
3.2 机械结构总体设计 11
3.3行走机构的研究 13
3.4 行走机构的设计计算 19
3.5 转弯机构的设计 24
3.6 腱机构 28
3.7 机器人的外形设计 28
3.8 驱动系统的设计 29
4.控制系统的硬件设计 35
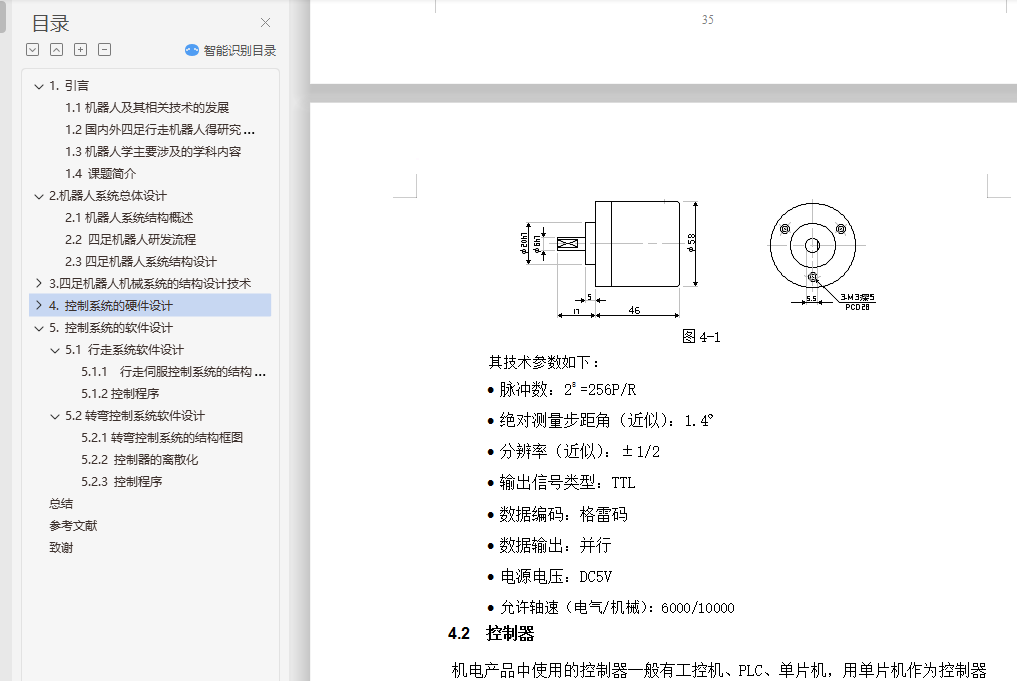
4.1传感器 35
4.2 控制器 36
4.3控制系统 39
5.控制系统的软件设计 42
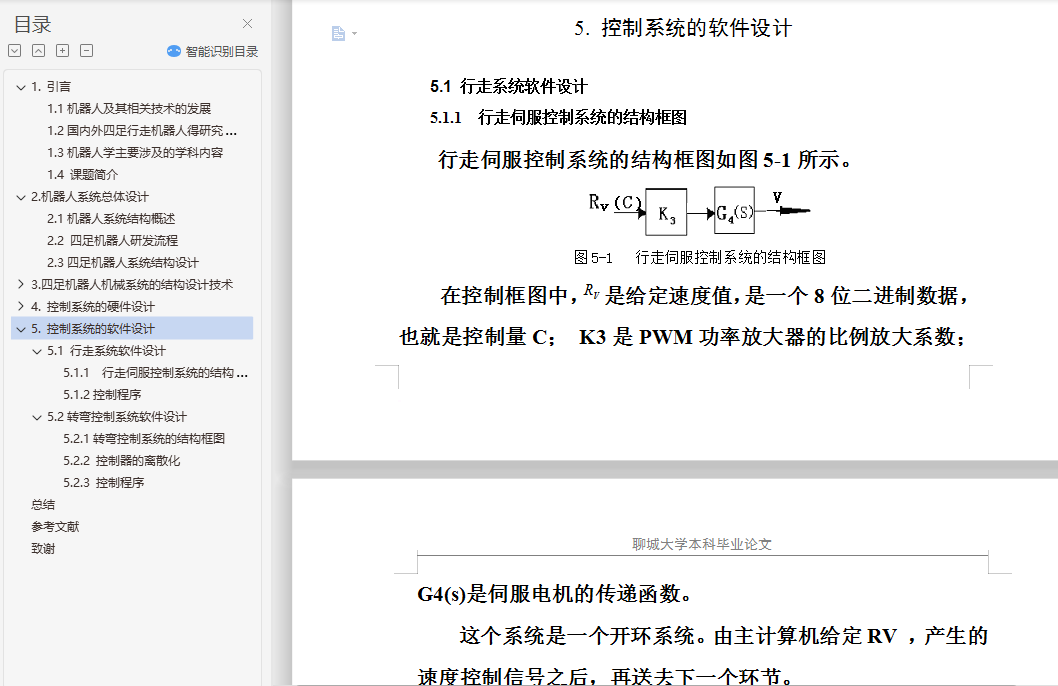
5.1 行走系统软件设计 42
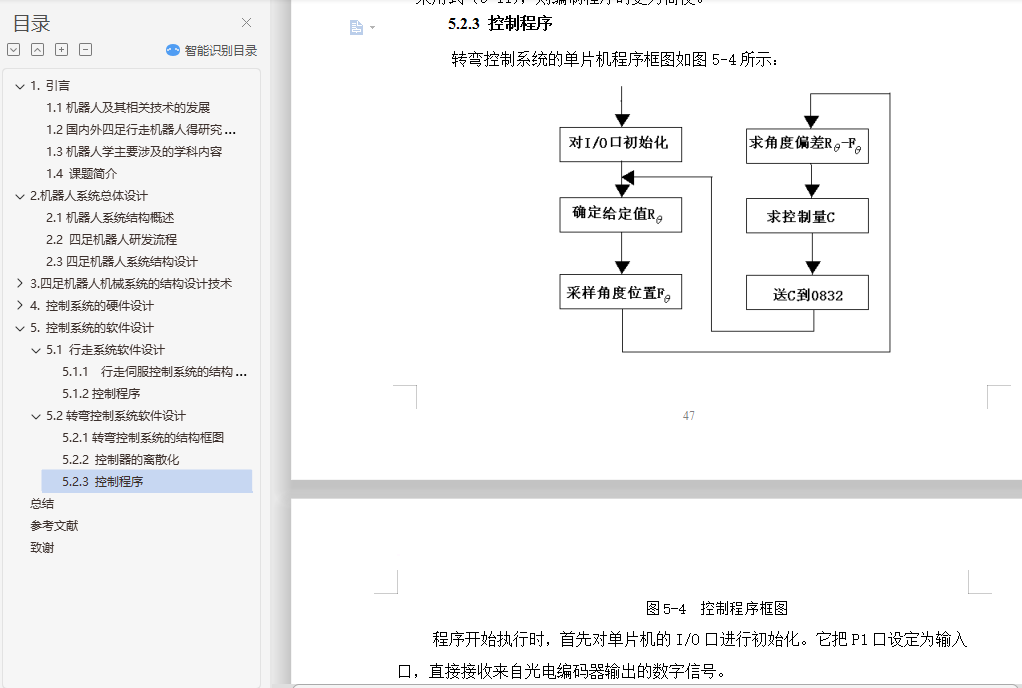
5.2转弯控制系统软件设计 43
总结 47
参考文献 49
致谢 51