|
设计方案:
(1) 机构方案
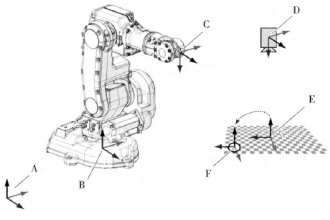
并联机器人机构如图 1所示。 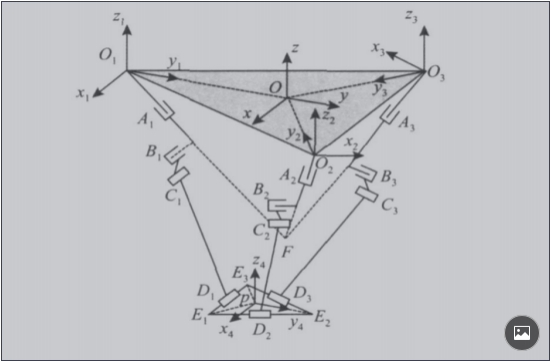
图 1 并联机构
图 1中并联机构由上、下两个边长不等 的等边三角形平台通过 3条完全相同的支链连接而
成 。3条支链的结构自上而下分别为:移动副 (P)、移 动副(P)、转动副(R)和转动副(R)。各支链中 , 2个 移动副垂直放置 ,其中 Ai为驱动副。移动副 Bi、转动 副 Ci及转动副 Di为中间关节, 同处 BiCiDi平面内且 轴线相互平行。3条支链绕 z轴对称分布。 在上平台 O1 O2 O3 中,取各顶点 Oi及形心 O为 坐 标 原 点, 分 别 建 立 笛 卡 尔 直 角 坐 标 系 Oi-xiyizi(i=1, 2, 3), O-xyz, 取竖直向上为 zi轴的正 方向 , yi 轴 方 向 指 向 上 平 台 形 心 O, O-xyz与 O1-x1 y1 z1 各轴方向相同 。与下平台固连的坐标系 p-x4y4z4 各轴方向与 O-xyz相同。 由修正的 Kutzbach-Gru¨bler自由度公式[ 8] 计算 该机构的自由度为 M =d(n-g-1)+∑gi=1 fi +v= 5 ×(11 -12 -1)+12 +1 =3 (1)
式中:M为机构的自由度数目;d为机构的阶数 ;n为 包括机架在内的构件数目;g为运动副的数目;fi为
第 i个运动副的自由度数目 ;v为多环并联机构在去 除公共约束因素后的冗余约束数目。 此外, 3条支链约束了动平台的 3个转动自由 度 ,因此该机构为空间三自由度平移并联机构 。
(2) 基于机构的控制系统方案
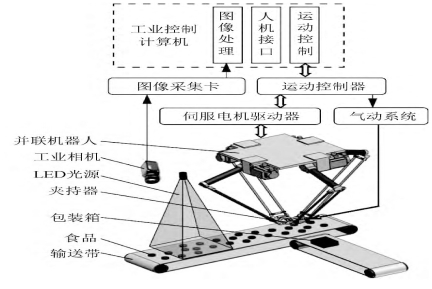
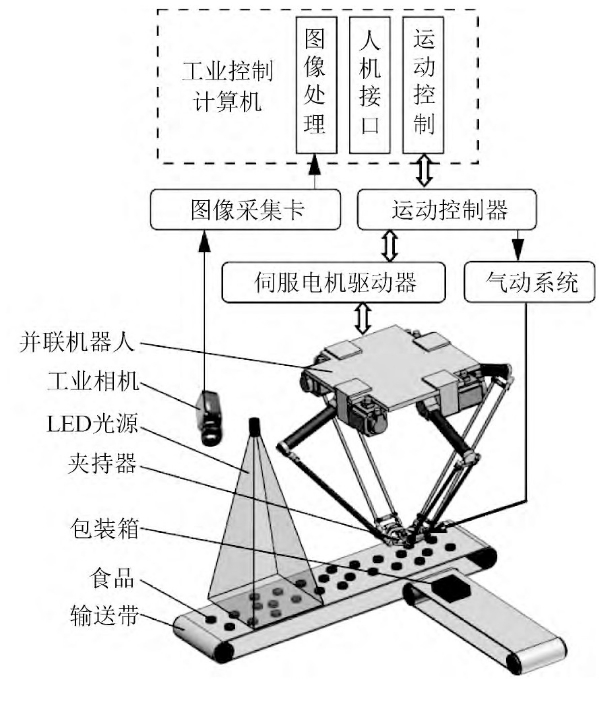
本设计采用以单片机为控制核心,实现抓物的基本动作功能,基于红外技术的收发系统实时检测机器人抓物的设计与实现的工作原理框图如图所示。
单片机型号的论证与选择
①方案: 51单片机
优点: STC89C52RC 是51单片机,它的成本低性能高而且支持ISP和IAP技术。用户可以在系统板上烧录自己的程序,修改调试非常简单方便。IAP技术能将内部部分EEPROM可以用专用Flash代替使用,保证停电后能保证数据不丢失,擦写次数可以达到100000多次,不用外接EEPROM。而且与传统8051单片机程序兼容,硬件无需改动。缺点:作为8位的单片机,运行速度相对来说比较慢。而且普通的非加强版51单片机并不带内部时钟电路,如果不外接振荡电路就无法工作,5v的工作环境相对来说比较耗电。
51单片机,作为年代最早的单片机,它使用的方式简单,基本能满足多种小型电子产品设计的需求,而且它使用和学习都十分简单,比较能被更多人接收。所以使用STC89C52RC 单片机。
STC89C52RC单片机是一种低功耗、抗干扰性强、速度快的单片机。
STC89C52RC单片机在系统可编程芯片上使用8051 核isp。其特点是结构简单,开发简单,价格低廉。
STC89C52RC微控制器有两种工作电压,一种是2.0 V到3.8 V,即三V电压单片微机,另一种是3.4 V到3.4 V,5 V电压单芯片微机,这种设计选择5伏电压单片机。.
STC89C52RC单片机具有广泛的工作温度范围,工业级MCU 可在40到85的环境中工作,在0到75的环境中,单片微型计算机的商业水平可以工作。
STC89C52RC单片机的工作效率最高为48MHz, 因此它可以以快速的速度处理相关数据。
STC89C52RC单片机有一个专用的复位电路,当外部的晶体频率低于20MHz时,它可以保存外部复位电路
②数据显示模块的论证与选择
方案: LCD12864
优点:12864液晶显示模块分为有字库和无字库两种,都是由128*64个点阵构成,该模块可以较多的各种文字数字字符图案等信息。而且使用较为方便。
缺点:该模块的价格较高,有字库的12864 在编程是容易出现字符乱 3驱动器模块的论证与选择
12864是一个带字符库的液晶,可以显示128*64个点。12864 液晶需要通过软件写入命令和数据才可以显示出字符。在初始化时首先需要写入命令,让12864液晶进入显示状态。设定显示地址。指令是根据12864液晶的数据手册编写的。
③驱动器模块的论证与选择
方案:继电器
优点:维电器是在电气输出电路中使用的电气控制装置,使用较为广泛,使用较为简单。而且根据不同的要求还分为不同的继电器,普通的继电器价格也便宜。
缺点:继电器的使用需要外接驱动电路,而且不同的功率的继电器所需要的驱动的电压也不同,所以使用维电器时要考虑到电源的要求。
本次设计不需要使用大功率电机,所以普通的继电器就能工作,所以选择继电器。
④电磁阀的论证与选择
方案:先导式电磁阀.
在通电的时候电磁力会先把导孔打开,这样会使上腔的压力下降,在关闭开关周围形成压差,流体产生的压力会推动开关向上移动,阀门开启。同样断电,阀门关闭。
优点:可以通过定制随意安装。
缺点:工作时有流体压差的限制。
作为机械手,需要满足任意性, 有力度限制,所以选择先导式电磁阀。
⑤电机控制方法
电机控制采用的是电机驱动控制。单片机对电机的控制采用的是使能和pwm法。电机驱动每个通道有一个使能端。两个使能端如果给的是相同状态的电平,那么电机就不会转动。如果两个使能端电平状态不同电机就会转动,转动的方向和两个电平的状态有关。控制两个电机的运动方向就是通过控制每个电机的使能端来实现的。电机运行速度的判定采用的是pwm的方法。使能端的信号以pwm的方式输入进去就可以调节电机的转速。
⑥机械爪控制程序
机械爪是用来控制抓取物体的一个机构,机械爪是由继电器和电磁阀机构以及机械传动机构构成的一个几点结合的设备。控制机械爪的抓取和放开主要是控制电磁阀的吸合和关闭的。电磁阀和是由继电器驱动的。继电器模块由于采用的是三极管驱动,三极管只要基极给一个低电平,三极管就会导通,继电器就会吸合,否则继电器断开。所以要控制继电器吸合只需要给三极管的基极
一个电平就可以。
⑦总结
该方案采用51单片机作为控制器,机器人手臂的横向运动由两个电机驱动,电机与传动带和驱动轮组成一套电机驱动系统。电机驱动系统将电机的旋转运动转换为机械臂的平行运动。电机采用电机驱动控制,对象手爪采用舵机驱动的机械爪结构。使用按钮控制整个当前操作系统显示在LCD上。在后期, 该方案采用51单片机作为控制器,机器人手臂的横向运动由两个电机驱动,电机与传动带和驱动轮组成一一套电机驱动系统。电机驱动系统将电机的旋转运动转换为机械臂的平行运动。电机采用电机驱动控制,对象手爪采用舵机驱动的机械爪结构。使用按钮控制整个当前操作系统显示在LCD上。
(3) 分拣系统设计方案
①采用Pixy Cmucam5图像识别传感器
Pixy Cmucam5是由Charmed实验室联合卡内基梅隆大学共同推出的一款图像传感器。其强大的处理器上搭载着一个图像传感器,它会选择性的处理有用的信息,将特定颜色的物体的视觉数据发送给相互配合的微型控制器,而不是输出所有视觉数据以进行图像处理。所以Arduino板或其它微控制器很容易跟它交流,并腾出许多CPU资源来执行其他事件。该模块不仅能进行颜色识别,还能知道带颜色物品的位置,通过颜色来追踪物体。
系统在图像识别时使用基于色调过滤算法(hue-based color filtering algorithm)来识别物体。通过将彩色图像从RGB空间转换到HSV空间,能够有效地提取出彩色图像中的颜色信息。另外,由于彩色图像中景物的色调信息(H)具有恒常性,它不易受到光照条件变化的影响,因此适应性更强。本系统在图像识别前,预先将被识别物体(立方体或乒乓球)的HSV值存入处理器,然后在识别过程中,将实时图像中各个坐标的HSV值与存储器中内容对比,从而找到匹配的物体,并将匹配物体的坐标发送给电机控制装置。实验证明,此方法对红橙黄绿青蓝紫各位颜色的物体均能快速识别,取得良好的效果。
②垃圾识别方法
完成垃圾图像的预处理:图像的增强、噪声滤除以及轮廓特征提取之后,中央处理器对得到的垃圾图像处理信息和存储器中的预设模型根据其大小、尺寸和形状轮廓数据进行对比分类处理(模板匹配),其中对于存储器中的预设模型数据,是通过大样本的垃圾数据采集将大量的目标数据存储在预设匹配模型存储器中。并将得到的分类数据通过指令的形式传递给分拣机械手臂,完成垃圾的分类放置,结果表明符合识别分类的要求。
1) 创建样本训练集(取特征提取较复杂的可乐易拉罐为识别目标并完成轮廓特征提取)。
2) 创建和训练分类模板(调整定位识别参数)
3) 完成模板匹配定位识别分类(实验中完成目标的两次定位识别)
③验证方法可行性(仿真)
利用Robot Studio软件对垃圾分拣机器人工作站进行三维建模及虚拟仿真, 其次将垃圾分拣机器人工作站配以机器视觉系统。
在本仿真系统中, 采用X-SIGHT机器视觉系统的智能相机, 光源控制器与光源。在真实工作站中, 本相机为智能化一体相机, 通过内含的CCD/CMOS传感器采集高质量现场图像, 内嵌数字、图像处理 (DSP) 芯片, 能脱离PC机对图像进行运算处理, PLC在接收到相机的图像处理结果后, 进行动作输出。相机支持的通讯方式包括:RS-485、100M以太网。相机通过RS-485串口可以与所有支持MODBUS通讯协议RS-485设备通信, 通过100M以太网可以与所有支持MODBUS-TCP通讯协议的100M以太网设备通信。在仿真工作站的采用的流程为皮带上随机产生不同颜色的垃圾, 视觉对相机进行识别, 将不同颜色的垃圾放入不同的箱子里。
|