1.1引 言
我国是人口大国,近几年住房需求量巨大,房地产开发的迅猛发展使我国的建筑业得到了飞速的发展,而随着人们对居住条件要求的不断上升,室内地砖作为一种房屋地面的铺贴装饰材料,也得到更加广泛的应用。传统的铺贴地砖方法主要依靠人力进行纯手工铺贴,这种地砖铺贴方法通常需要多人准备砂浆和地砖,再由一人进行铺设,且在铺设的过程中需要多次重复找正、铺设、敲打等工序,这样的铺设方法效率低、劳动强度大、铺贴质量不稳定,因此施工成本极高。所以,近些年不同种类的地砖铺贴装置相继问世,从根本上降低了地砖铺贴的成本,提高了地砖铺贴的效率和质量。相比于传统的手工贴地砖,地砖铺贴装置的使用使地砖铺贴更加方便、省时、省工、高质、高效。因此地砖铺贴装置的市场应用前景十分广阔,从而使开发地砖铺贴装置有着巨大的经济效益和社会效益。
1.2地砖铺贴装置的设计背景
目前市面上的地砖铺贴装置只是对地砖铺贴过程中的部分工艺流程起到辅助作用,如有些地砖铺贴装置只是将地砖进行排列,还有一些只对地砖铺贴装置进行了部分设计方案的探索,如直角坐标铺贴机中只是探索了机械结构设计,市面上还没有全自动化的地砖铺贴装置。为了解决地砖铺贴作业中存在的效率低、质量差、成本高、劳动强度大等问题,我开展了地砖铺贴装置的设计,该自动化地砖铺贴装置主要由自动化抹灰和自动化铺贴两步工艺组成,自动化抹灰主要采用刮切原理实现,自动化铺贴主要采用压紧震动原理实现。
1.3地砖铺贴装置的研究内容及意义
随着时代的不断发展与进步,人们的生活条件也在日益变化着,从而对生活质量的要求也在逐渐提高,对居住环境的要求更是在逐渐提高。而作为基建强国,我国的建筑业最近十多年正在蓬勃发展,但我国的室内地砖铺贴很大一部分基本都是人工铺贴,这种铺贴方法存在一系列有待解决的问题,如铺贴效率低下,铺贴质量难以保障,人工成本高昂等。所以为了提高铺贴效率和质量、降低人工成本,开始了自动地砖铺贴装置的设计和研发。而通过调查研究表明,利用地砖铺贴装置可以大量节约人力物力资源,还能提高地砖的铺贴效率和铺贴质量,这对于建设和发展资源节约型社会有着重要的意义。而且现今时代,地砖铺贴装置在我国几乎处于空白阶段。于是发明一种省力、高效的地砖铺贴机就显得很有必要,所以我有意于设计一种仅靠人力推动便能自动铺贴地砖的装置。
综上所述,地砖铺贴装置有一定的技术预留,而且发展空间和潜力极大,它的实际应用价值也非常广泛。更有很高的商业投资价值,所以这是一个极具研究意义的课题
1.4国内外地砖铺贴装置的发展现状
1.4.1国内地砖铺贴装置的发展现状
目前国内地砖铺贴装置还没有相当成熟的技术,投入研究的单位和个人也比较少,市场上仅有些为数不多的同类产品,还处于模仿生产的阶段,产品的研发和技术创新能力不足,从现有行业产品和技术的发展形势上看,我国行业确实存在技术研发不够,行业发展落后等问题,很多先进的技术需要从国外引进,加大研发已经成为解决现有行业问题的关键。地砖铺贴装置一直在发展创新的道路上越挫越勇,这几年随着国家墙改政策的不断深入,地砖铺贴装置正在迅猛发展。地砖铺贴装置的大力推广,促进企业做到积极引进、积极开发,自主成长,同时相关部门将发展节能建筑和新型墙体建筑纳入城市建筑总体规划,确保新型材建筑每年按一定比例增长,将地砖铺贴装置市场的积极因素能够得到充分涌流。
1.4.2国外地砖铺贴装置的发展现状
国外地砖铺贴装置也处于发展阶段,市场上普遍存在的地砖铺贴装置也是功能较为单一的设备,少有集抹灰铺砖于一体的全自动铺砖装置,室内装饰用小型地砖自动铺贴装置基本都是从大型室外地砖自动铺贴设备简化演变而来,从最早期单一功能的设备逐渐完善而成的,早期的地砖铺贴设备有单一的抹灰机、地砖装卸机、地砖平整设备和压实设备等,后期逐步整合为一体慢慢演化成现今的一体式设备。其中具有领先地位的是荷兰发明的一款名叫虎石的室外自动铺砖装置,只要它驶过砂基路面,上面就会自动留下一条严丝合缝的砖路,这款铺砖装置自动铺路的秘密在于其基于重力作用下的设计,施工时只需将砖块填装进一个成角度的装料槽,随着它在砂基路面上一点点向前行进,砖块便因重力作用在铺砖装置内部自动码放在一起,当它在前面慢慢开路时,可用一辆小型的伸缩臂铲运车亦步亦趋地跟在后面,为其填充砖块,在两者的合作下,每天的铺设面积可达 400平方米,铺设的宽度也可以进行调整,最宽为 6米,但它却难以运用到室内铺贴中来。因此从国内外地砖铺贴装置的发展现状来进行分析,地砖铺贴装置具有较大的经济前景和发展空间。
第二章 地砖铺贴装置的原理设计及方案选择
2.1地砖铺贴装置的原理设计
地砖铺贴装置的设计需要涉及到铺贴装置的前进、沙浆的铺撒、地砖的铺贴、找正及压实等方面。该地砖铺贴机在设计中选用步进电机通过同步带驱动后轮带动铺贴机运动,通过料斗和刮沙板将河沙刮平并铺设水泥浆,利用气缸和真空吸盘实现地砖的搬运,使用振动电机将地砖压实。使用铺贴机将整个铺设工艺流程都自动化了,只需要添加原材料即可。所设计的地砖铺贴机为小车状,如图2-1所示,车身下部装有动力机构控制小车的前进,前部装有料斗,中间部分是料仓,后部中间部分是电气控制部分,上部是气缸等铺贴机构。
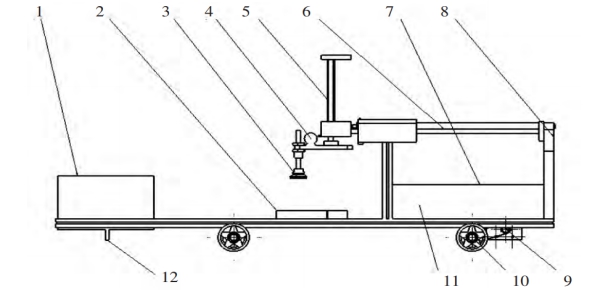
图2-1 地砖铺贴装置结构图
1.料斗 2.上料台 3.吸盘 4.振动电机 5.升降气缸 6.前后气缸
7.电器柜 8.梁 9.步进电机 10.驱动轮 11.电器柜 12.刮砂板
由于地砖铺贴运动基本都属于直线作业,只需要设计小车的前进运动即可。为了保证铺设地砖的水平度,在小车的四个轮子与车身的连接处都设置了升降杆和水平仪用来调节车身的水平状态。地砖铺贴机的前端设计了料斗(1),其中装水泥浆,下设开料板控制水泥浆的铺设,料斗后端的刮砂板(12)负责将水泥浆刮平,上料台(2)设计了活动挡板,可以调节挡板的间距适应不同大小的地砖,采用两个气缸来实现地砖的铺贴动作,其中升降气缸(5)实现地砖铺贴中的上下动作,前后气缸(6)实现地砖的前进动作,真空吸盘(3)来拾取地砖。依靠升降气缸(5)上的震动电机(4)来实现地砖的贴实压紧,避免地砖铺贴过程中出现松动和空鼓现象,气动控制原理图如图2-2所示。
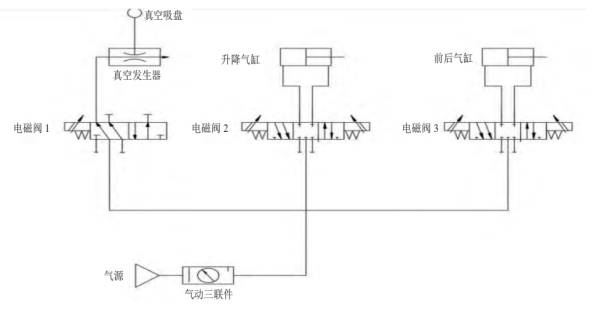
图2-2 地砖铺贴装置气动控制图
该地砖铺贴装置选择单片机作为控制器,虽然单片机功能没有PLC强大,编程难度也比PLC大,但其价格便宜,适合于大面积的推广。在该地砖铺贴装置中我们选择了AT89C51单片机,该单片机价格低,应用极为广泛。驱动机构选择步进电机。步进电机通过同步带和带轮带动小车的后轮前进,选择步进电机通过同步带来驱动小车的后轮,这样可以防止弹性滑动、打滑等,提高铺贴的质量和精度。样机中选择了法兰克MD542步进驱动和F-57BYG1832步进电机,该套装中步进电机的扭矩为3.2 N・m,步进电机通过单片机发出的脉冲数控制小车的前进距离。在设计中需要注意电源电压的转换。我国民用电网电压是220V,单片机和步进驱动器控制电压是5V,步进电机需要的电压是24V,为了实现不同电压需求,电路中使用了两个变压器。为了实现单片机能够控制气动电磁阀,选用了TELESKY 的4路光耦隔离继电器驱动模块来进行控制电压的转换。单片机经过运算,输出控制信号控制光耦继电器,光耦继电器接通电磁换向阀的24V电源,从而控制气缸和振动马达,电气控制图如图2-3所示。
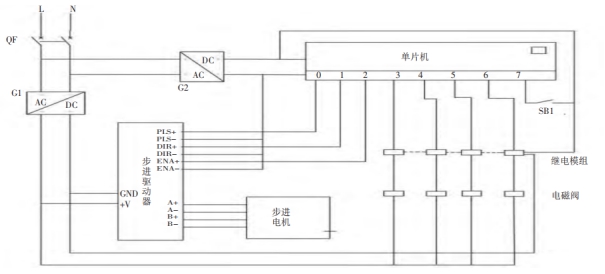
图2-3 地砖铺贴装置电气控制图
2.2地砖铺贴装置的方案选择
该地砖铺贴装置整体机械部分可分为抹灰系统、提砖系统、运载系统、铺砖系统、压实系统。该地砖铺贴装置作业前,有人工把水泥浆盛放在料斗里,地砖放置在上料台上,该地砖铺贴装置开始铺砖作业后,料斗下口打开,水泥浆从下口流出,刮砂板运动刮平水泥浆,再控制吸盘吸住地板砖,移动地砖至需要铺贴处,根据四轮上的水平仪及升降杆找平地砖位置,最后通过震动电机压实地砖,整个工作周期完成。整个装置基本实现了地砖的自动铺贴,因此大大降低了地砖铺贴的操作难度。
第三章 地砖铺贴装置结构设计及计算
3.1梁的设计及计算
设计的目的;保证梁的强度,使其能够承载整个装置的运作及装置自身的重力。
方案设计:
(1)对XOY面受力分析。
求XOY面支座反力如下图3-1所示。
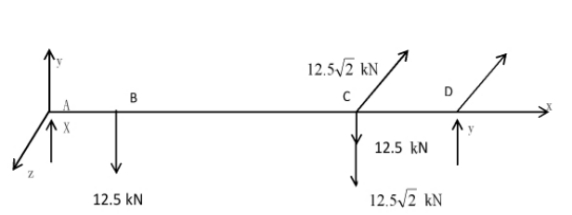
图3-1 XOY面支座反力分析图

对XOY平面剪力分析如下图3-2所示。
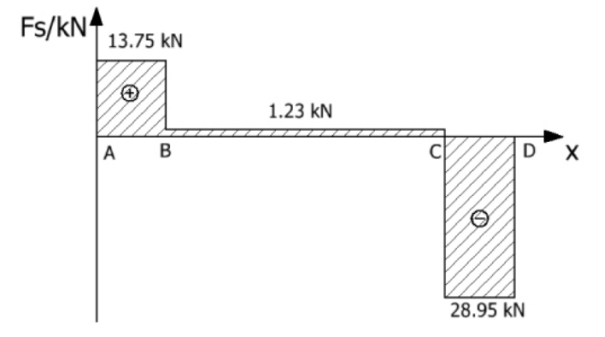
图3-2 XOY平面剪力分析图
对XOY平面扭转分析如下图3-3所示。
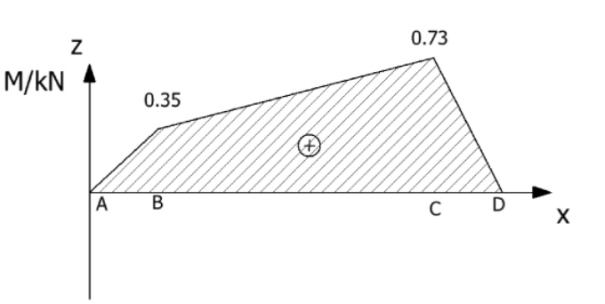
图3-3 XOY平面扭转分析图

(2)对XOZ面受力分析。
求 XOZ面支座反力,同XOY面分析过程相同可得:
对XOZ平面剪力分析图如下图3-4所示。
。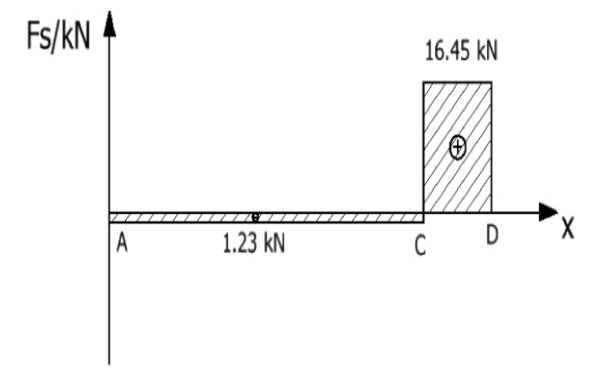
图3-4 XOZ平面剪力分析图
对XOZ平面扭转分析图如下图3-5所示。
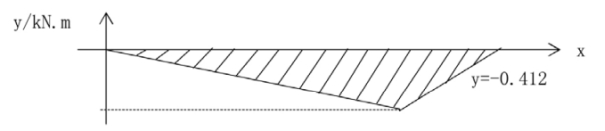
图3-5 XOZ平面扭转分析图

综上所述,C处为危险截面,b=0.01m,h=0.03m。


则,梁可以支撑。
参考文献
[1] 赵刚,花勇.自动化地砖铺贴机的设计研究[J].机械工程师2015(05).
[2] 李刚,周文宝.直角坐标机器人简述及其应用介绍[J].伺服控制2008(09).
[3] 王越.全自动智能贴砖机:中国专利:CN203769269U[P].3014-08-13.
[4] 刘庆军.智能贴砖机:中国专利:CN201310095604.4[P].2013-06-12.
[5] 丁继斌,封士彩.机械系统设计及其控制技术[M].北京:化学工业出版社,2007:21-100.
[6] 徐文华,李文峰.人机工程设计[J].机械,200431(增刊):55-60.
[7] 刘华.工业设计造型基础[M].北京:清华大学出版社,2005:66-87.
[8] 梁玲,赵春章.中文版Pro/ENGINEER Wildfire 4.0实用教程[M].北京:清华大学出版社,2008:15-208.
[9] 王先达.机械制造工艺学[M].北京:机械工业出版社,2006:90-110.
[10] 刘鸿文.(材料力学(第四版)[M](北京:高等教育出版社,2004:120-155.
[11] 刘朝儒.机械制图[M].北京:高等教育出版社,2006:50-99.
[12] 于永泗,齐民,徐善国.机械工程材料[M].大连:大连理工大学出版社,2007:15-102.
[13] 刘会英,杨志强.机械基础综合课程设计[M].北京:机械工业出版社,2007:201-205.
[14] 寇尊权,王多.机械设计课程设计[M].北京:机械工业出版社,2007:33-58.
[15] 王越.一种自动贴砖设备的抓取装置:中国专利:CN207348406U[P].2018-05-11.
[16] 王越.一种自动贴砖设备的臂移栽组:中国专利:CN207277787U[P].2018-04-27.
[17] 王越.一种自动贴砖设备的转向移动机构:中国专利:CN207277786U[P]. 2018-04-27.
