�����о�ˮ������Ի�е�̼���Ӧ��Ƭ���ͻ�����
ABABcTFAY��d�����¾���c��Ұԣ֮��eIkuko Shihira-Ishikawae��Atsushi Miyawakie
�ڱ����У����������һ����ӱ�ģ������������ͻ����ˣ���װ�п�ܽṹ�������̼�ˮ�������Ч���� �����˻��������εľ���λ�ƷŴ���Ƶ������нṹ����ƺ����졣 ��������ʹ������ϵͳ��MEMS������������Si-Ni��Ͻṹ��ɡ� ����5�����������������ͻ�����ͨ��������������Ƭ���������Ա����ǿ��Ծֲ��ش̼������ڷ�յ�оƬ���ȶ���������������� �����ṩ�������ƶ��ԣ������������ͺ�ţ�ټ������߹��ʣ��Լ������� ������ǽ��������ͻ�����Ӧ����Pleurosira lavis��P. laevis���̼��Ķ�����������ȷ��ʩ���뵥��ϸ����Ӧ֮��Ĺ�ϵ��
����
�������ѧ�У���ϸ���Ļ�е�̼��ѳ�Ϊ����ϸ�����ܺͻ�е���Եı�Ҫ����1�C6���ر��ǣ��ü��������˽�ˮ�������Ӧ�û��ƾ�����Ҫ��DZ��7,8��������ˮ���������ѧ������δ��ȫ�˽⣬���Ի�е��������������Ƕ�ϸ������ã�ϸ���������Ӻ��ܵ�����������Ҫ�Ļ�е�������� ��Ȼ���������ѱ����������ڴ̼�оƬ�е�ϸ���Ա���ʵ��ķ��㣬����9,10��е̽����һ�ָ�ǿ��Ĺ��ߣ����Խ�һ����ʩ�ӵ�����ϸ�����ض���λ��Ϊ�̼���
��������е�̼������ﷴӦ֮��Ĺ�ϵʱ��Ӧ�ÿ���������Ҫ��Ҫ������
�̼�����Ĺ���; ������Ϊʩ�ӵ�����ϸ���Ĵ̼���������; �Լ������ȶ�ʵ���������������Ա���Թ۲쵽��Ӧ�ڴ̼������ľ�ȷ��ѧ��Ӧ�� ͨ�����ֶ���ͨ����������ʹ�����������о���� Ȼ������Щ�����������������������ˮƽ�dz��ͣ���Ϊ�����߱��봦��ϸ���IJ������ߡ� �ر��ǣ���ʹ�����û�е���ֶ�ʩ�Ӵ̼�ʱ�����Ը�֪ʩ�ӵ����� ���⣬����������������Щ��������˽�����ϵͳ�������ȶ��������¶������ܵ���Ⱦ������Ƿdz����ѵġ� ��ˣ���Щϵͳ���������о���Ա���ر�������ѧ�ҵ�Ҫ��
�����о�������ּ�ڲ��ݺ�/�������������ӻ�еϵͳ��MEMS�������ϡ� ����ˡ� �����˻��ڹ��Ե�壨SOI�����������ɶȣ�DOF�������������ô����������ڼ����ݱ仯����״�ṹ����11���ô�������������ĸϸ������ѧ���ܡ� �����ˡ� ���������ڲ�����ĸϸ���ڻ���ɨ�����������ESEM���ڵ�ճ����������̽�룬��ɨ�����������һ�ֻ��ڿ�ܵ���������12Cappelleri et al�� �����һ���ɾ۶��������飨PDMS���Ƴɵ������ͻ����˵��ɼ���������13���ô���������ͨ��ʹ���Ӿ������������������ϲ������� Ȼ����Ϊ������խ�Ŀռ��ڲ������壬��Щ���������������������������� ��ˣ���ӡ������
���������ֳ�Ҫ����һ���ȶ��Ļ������Թ۲컯ѧ��Ӧ�� ͬʱ�������˾�������λ���ȵĹ�ѧ�������������ˡ� Ikuta���� ������һ���ɹ���֬�Ƴɵ�6���ɶ���������14���dzɹ��ز�
���������廷����ʩ�ӵ�ֱ��Լ5mm�Ľ�ĸϸ���ϵ����� ������ˡ� ������һ����������
ϵͳͨ��ʹ�ö�����ѧ����15���ǵĹ�ѧ����ʹƬ�ϲ���û����Ⱦ�� ��Щ������ȱ�����������������������ⲻ���Դ̼����м�Ӳ�ṹ��100�������
�ڴ˻����ϣ����������һ����ӱ��Ƭ��ϵͳ
��ͼ1��ʾ��ͨ��ʹ�ô����������������ܹ��������в�������������оƬ�д̼������Ч����ͨ��ʹ�þ������в�ṹ�������ṹ���ķǽӴ��¶������ˣ� �����ǿ���ʹ���������ǿ��������ţ�ټ�����ʩ�ӵ�������Ԫ��Ȼ����������ı��������ʩ�ӵ����� ������ʱ��ʹ����ȫ��յ�����оƬ����ˣ����ǿ��Ա�����Ⱦ���ڲ��������б����ȶ���ʵ�������� �����Ҫ����Ϊ�б�Ҫ�����۲���Ӧ�ڴ̼����������з����Ļ�ѧ��Ӧ��
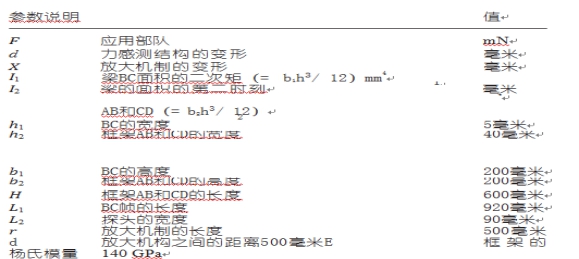
�������о��У����ǿ�����100���״�С�ij�ΪPleurosira laevis��P. laevis�������Ĺ��壬֮ǰ�Ѿ��û�е̽�����������о�����ȷ��
����ص���Ϊ�� һЩֲ��ϸ����ʾ����̼���Ӧ���Ƶ���Ϊ; Ȼ����P. laevis�ĵ�ϸ����Լ��Ҿ��м�Ӳ����ǡ� ����ζ�ŵ���ϸ������ͨ����е�������ɴ������Ӵ�Ⱥ�����Ƴ��� ��ˣ�ѡ��P. laevis��Ϊͨ����е�����о��������﹦�ܵĵ�һ����
���Ϻͷ���
��ƾ�������Ӧ�ṹ���ͻ�����
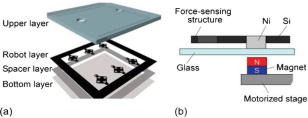
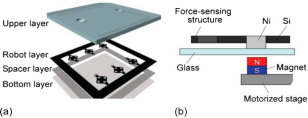
����������оƬ�е��������ɴ��Բ����Ƴɣ����ҿ��Դ�����оƬ���ⲿͨ����װ�ڻ���ƽ̨������xy����ƽ̨����ת������ϵ�����������������ͼ1��ʾ��ͨ��ʹ���ĸ�����������һ���ͻ����ˣ����ǿ���ʵ���ͻ���������ά���ɶȣ�x����y�����h��ת���µ��ȶ��˶�16����ȫ��յ�����оƬ���Ժ�ţ�ٵ�˳�����������ϸ�����в��ݡ� ����ʹ���˷�յ�оƬ�����DZ�������Ⱦ���ڲ��������б������ȶ��������� ��ϵͳʹ�����ܹ����Ϲ۲�̼�������Ļ�ѧ��Ӧ�� ���⣬���ǵķ���������Ϊ��С�ߴ���¶�ϵͳ�;���һ����оƬ�ṹ���ŵ㡣 ʹ�ô�ͳ������
���dzɹ��ؽ������ɶ��ͻ����˵Ķ�λ���ȴӼ��������ӵ�1.1���ף�����ͨ��ʹ��һ���µİ���������ķ�����һ��
�����ķ������������˺ͻ���֮���Ħ��16,17������������������оƬ���ƶ�ʱ������Ҳ�ɹ���ʹ�����ǵ��ͻ����˴�����100����ϸ���� ���ǣ����ǵ��ͻ�����Ҳ�����
��ͳ�������ͻ�����û�д�����������ʩ�ӵ�ϸ���ϵ���18�C21
һ����˵���κ���Ҫ�������ߵ�����������������δ�����Ƶ��ͻ����˵�ĩ��ʵ�֡� ��ˣ����������һ�����ڿ�����ṹ��������������ͼ1��ʾ���������˴̼�ϸ��ʱ�����ǿ���ͨ��ʹ��������������нṹ�ı���������ʩ�ӵ����� ���ܻ��ڹ������ε����в�ֱ�����Ե�������������������������ݱ仯��ѹ��ЧӦ��Ӧ���ǣ����������ṹ�ͻ����Ӿ��IJ���������ṩͨ���ͳɱ���������ϵͳ����Ƭ�ϵ��飬������ߡ�
ͼ2��a����ʾ�������нṹ�Ŀ��ģ�͡� ���ֽṹ�������۽ṹ�����ͻ�����������ʱ���б�Ҫ�����ͻ�����ֱ��ǰ���� ���⣬�Ŵ�������εĻ��Ʊ������ڿ��������������������в�������ȡ� ��һ��С̽�����ӵ����в�ṹ�Ķ��ˣ�����
��ϸ���ϵ��ض�λ�á� ��1�г��������ṹ�IJ�����
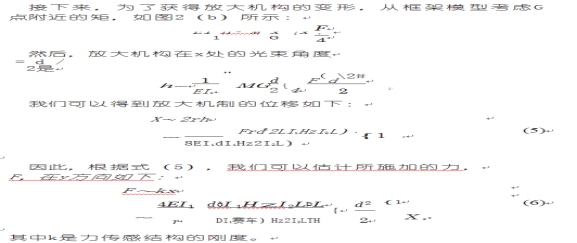
����Ŵ������λ������ʽ��ʾ
X = ad�� (1)
����a�ǷŴ��ʡ� ���ȣ�Ϊ�˻����������Ŀ�ܱ���d�������ܵ�һ��
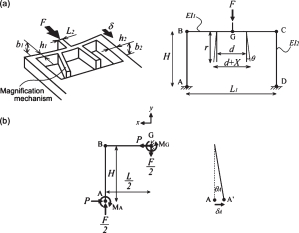
ͼ2���ڲ�����̬�����ε����в�ṹ�� ��a�����ݿ�ܵı��γ̶ȹ���ʩ���� �Ŵ���������ڷŴ�d�ı��Ρ� ̽���˵���״�ɸ���Ӧ��Ҫ����и��ġ� ��b��������Ӧ�ṹ��ϸ��
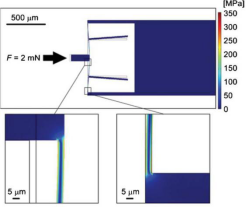
ͼ3ͨ������Ԫ����FEM��ģ���õ�von MisesӦ���� ���Կ��ʩ��2mN����ʱ�����Ӧ��Ϊ350MPa
�����˴��۲죨���ȣ�5mm����ȣ�200mm���� ����������£��Ŵ����û���������
r = 500 mm��d = 500 mm���Ա��ڲ��������й۲��������в�ṹ�� ���������ķֱ��ʺ������ṹ���;��ԣ������趨h1= 5mm��h2= 40mm�� ͼ3��ʾ�˻�����Ʋ���������Ԫ��������� �ڴ˷����У�Ϊ�˼���������Ǽٶ��ͻ����˽ṹ�ɸ���ͬ�Ե��Բ����Ƴɣ�����Si���и������Խṹ�� �������֤ʵ5mm�������в�ṹ��Si���ѵ�Ӧ�������ھ��д�ĵ��Ա��Ρ� ���⣬����������зŴ�����ķŴ���aΪ3.2��
����ʵ�־������в�ṹ��Ƭ���ͻ����˵����췽��
Ϊ��ʵ�־������в�ṹ��Ƭ�������ˣ���Ҫ����������췽���йص��������⡣ ���ȣ��ͻ�������оƬ����֮������൱���Ħ���� �������в��е�һ���ؼ����⣬��ΪĦ������Ӱ�콫�����ڲ������������С� ��Σ��������в�ṹ�dz���.
ͼ4���������ͻ����˵�����оƬ�Ľṹ�� ��a���IJ�оƬ����ά��ͼ�� �ϲ��Ƴ�
���Ϊ5mm��PDMS�������˲���200mm���Si��Ƭ�Ƴɣ��������10mm��ĸ����¿�ʴ����SU-8���Ƴɣ����ҵײ���100mm - �������� ��b�������˺Ͳ�����ĺ����ͼ�� ��������Ӧ�����ͻ�����
��оƬ�ⲿ��������������ڻ���̨�ϣ����ҽ�Ni���ֲ���Ƕ������ˣ�Si�����С� ��Ҳ�������ڲ��������б��ֻ������벣����֮��Ŀռ䡣 ���ֵ�Ƭ��Ϊһ�ֱ���Ħ���Ļ��Ʒ����˹ؼ����á�
������Ҫ���ͻ����˲������ơ� ������в�ṹ���ƻ�����һ�������˿��Ա����벢�����µ������ˣ���ͼ5��c����ʾ�� ��������˿���Ϊ50mm�IJۿڽṹ�Խ���Si�Ķ���Ӧ����2-3GPa����22��
��������ӱ�ģ���Ϊ���Ǵ�����һ���㷺�Ļ
����оƬ�ϵ����в�ܵ��ͻ����ˡ�
ͼ6��ʾ��ÿ���������̡� ���ǿ�����һ��ԭʼ��Si-Ni��Ϲ��գ��Ա��������˲㡣 �����ϲ㣬�����Թ��¿�ʴ����SU-8 3050��MicroChem����Ϳ����¶��Si��Ƭ�ϡ� ͨ��ʹ������ģ�ߣ�����������5�����PDMS���Dz㣨ͨ���߶ȣ�300���ף���
���ڻ����˲㣬���Ƚ���Cr��Au��
һ��200����Ĺ辧Ƭ���棬��һ����100������ȡ�����ڵ�ơ� Ȼ���ڵ���ڼ���ͿSu-8��֧��Cr-Au�㡣
��������ͨ����̷���Si��Ķ����϶�����̽���OFPR 200CP��Tokyo OHKA�����й�ͼ���γ�Ni�ṹ�� ʹ��SF6��C4F8���Ӧ����ʴ�̣�DRIE����Si�����ʴ�̡� Ȼ��ͨ��O2�һ�����ȥ��Cr�㡣 Ni�ṹ��
ͼ6���������нṹ��Ƭ�������˵�������̡� ��a��ͨ�������������ϲ㣨PDMS���� ��b����DRIE�͵���������Ļ����˲㡣 ͨ��DRIEʴ��Si��Ƭ���Σ�����ͨ���������Ni���֡� ��c���ù�̷��ڲ�������������SU-8�Ƴɵļ���㡣 ��d��ͨ��PDMS�͵����������װ������в㡣
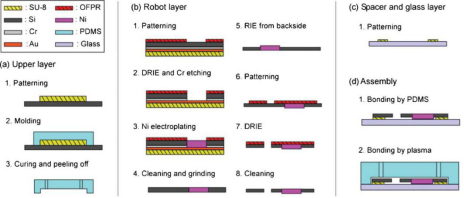
 ����������������Ĵ�������ã�ͨ�������ܶ�Ϊ2A��dm22���е�ơ� �û�ѧȥ������Remover PG��MicroChem����ʴ�̼�ϴ�ӹ�̽���SU-8��OFPR����Cr-Au�㡣 Ȼ���ý��ʯ��ĩ��ֱ����0.125mm����ĥSi�����Գ�ȥ������Ni�� ֮��ͨ��ʹ��DRIE�ӱ���ʴ��Si��10mm���γɱ���Ħ���Ŀռ䡣 OFPR��ͼ��������Si��Ķ������γ��ͻ����ˡ� ���ʹ��DRIE��Si���������������������ṹ�����ʹ�û�ѧȥ����ȥ��SU-8��
����������������Ĵ�������ã�ͨ�������ܶ�Ϊ2A��dm22���е�ơ� �û�ѧȥ������Remover PG��MicroChem����ʴ�̼�ϴ�ӹ�̽���SU-8��OFPR����Cr-Au�㡣 Ȼ���ý��ʯ��ĩ��ֱ����0.125mm����ĥSi�����Գ�ȥ������Ni�� ֮��ͨ��ʹ��DRIE�ӱ���ʴ��Si��10mm���γɱ���Ħ���Ŀռ䡣 OFPR��ͼ��������Si��Ķ������γ��ͻ����ˡ� ���ʹ��DRIE��Si���������������������ṹ�����ʹ�û�ѧȥ����ȥ��SU-8��
ͨ����̷��ڲ��������γ�10mm��ļ���㡣 �����PDMS���������˲㸽�ŵ�������ϣ�����ͨ�����������Ͻ��ϲ�Ͳ����㲻�������װ��
���������
װ��������Ӧ�ṹ���ͻ�����
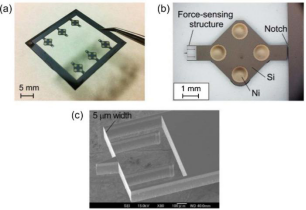
ͼ7��a��ʾ���˰������������˽ṹ������Ļ����˲㡣 ͼ7��b��ʾ���˾���5mm�������в�ṹ����ȫ����ĵ��������ˡ� ����ͨ��ʹ�����������������ɹ���������Si-Ni�ṹ�� ���ǵ�Si�ĸ������ԣ����ǽ��пڽṹ������ƽ����
��100��Si��Ƭ�ģ�110������ȡ���Դٽ��и����Ķ��Ѻ�ƽ����
ͼ7��c��ʾ�������в�ṹ�ķŴ���ͼ�� �Ѿ�֤ʵ����1������������ڣ��辧Ƭ������DRIE��ֱʴ�̡�
�����нṹ������
������������������в�ṹ�ķֱ��ʡ� Ϊ��ȷ����ʵ�ʵ������ݣ���ʹ��λ�þ���Ϊ2mm������ƽ̨ʱ�����������Ƶ���������������LVS-5GA��KYOWA���ϣ���ȷ��Ϊ10mN����ͼ8��a���� Ȼ������ʹ�ô�������������CCD��������ֱ��ʣ�0.9��������21���������������Ρ�
ͼ8��b����ʾ��ʵ������֮��Ĺ�ϵ
ͨ�������������������������λ��X�������� ��Щ��������ڲ�ͬ�����·�����һЩС���ͺ����� ���⣬��ʩ�ӵ�������3.0-3.5mNʱ�����ı��εķ��������ӡ� ������Щ����������ֻʹ���ƶ��ε�λ��X����ý�����Χ������3 mN��������ȷ���������ݡ� ͼ8��c����ʾ�˲����������ɵ�ʽ��6������Ĺ����������֮��Ĺ�ϵ�� ������֤ʵ�˲����ĺ��Ƶ������ݲ�ͬ�� ����ͼ��ʾ��ͨ���������������ǿ��Ծ�ȷ�ع���������
ͼ7������ṹ����Ƭ�� ��a��һ�������˲㣬����װ�������������ͻ�����ͨ�����ڽṹ���ӵ��ò㡣 ���С�ṹ�IJ���Ժ����������Ӵ����� ��b��������Si��Ni������ɵ����в�ṹ�ĵ��������ˡ� ��c����SEM�����������������д�� ����DRIE����ʵ����40��1�ĸ��ݺ�ȡ�
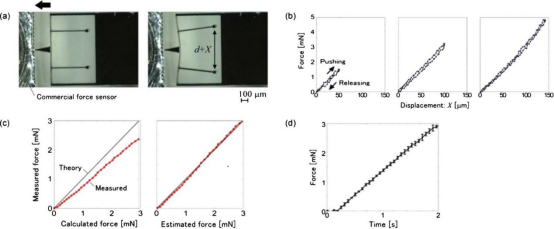
ͼ8��������в�ṹ�������� ��a��ʵ������� ��һ�������˴Ӳ����ƿ���������������������ȷ�������ԡ� ��b���ɷŴ�������������������ı����������ֲ�ͬ�����´���������������õIJ�����������֮��Ĺ�ϵ�� ��c����������������У��������������� ����õ����������Ǵ�ģ���л�õģ������������췢������ ͨ��ʹ��ʵ�ʲ����IJ�����У�����Ƶ�����������ù��Ƶ����� ��d����ͬһ�����˲㣨n = 5����ǿ��ͨ����ͬ�����в�ṹ��õ����ݡ� ����������ͬ��λ�ƺ��ٶ��Ƶ�ǽ�ϡ� ��ʾʱ��߶�������ģ��ʵ�ʵ����������
 ͼ8��c���IJ��档 ͼ8��d����ʾ��ͬһ�����˲��в�ͬ������������������ƫ� ��һ���֤ʵ�˴������Ŀɱ���С��10���� ͨ������װоƬ֮ǰ���������Уһ���ͻ����ˣ����ǿ����ڲ����ڼ�ʹ�������ͻ����˶�����У�� ���ͨ����Щʵ�飬����ȷ���˴�Լ����С���в�ֱ���
ͼ8��c���IJ��档 ͼ8��d����ʾ��ͬһ�����˲��в�ͬ������������������ƫ� ��һ���֤ʵ�˴������Ŀɱ���С��10���� ͨ������װоƬ֮ǰ���������Уһ���ͻ����ˣ����ǿ����ڲ����ڼ�ʹ�������ͻ����˶�����У�� ���ͨ����Щʵ�飬����ȷ���˴�Լ����С���в�ֱ���
80��ţ�� �������͵����������ķֱ�����
������ķֱ��ʺ;��ܱ��ε���������ȷ���� ���ǣ��������۵�������һ����Ŀɱ��ο�ܵ����˺ܴ���ͺ�ͷ����ԡ� ��ˣ�ͨ��ʹ�ø߷ֱ�����������ǿ��ԱȽ�������ߴ��������ܡ� ������Ϊ���������ܿ��������������������壩�Ĵ̼�������Ա��ڵ�������ڽ��ṩ������Ϣ�� ���⣬��ʹ������ͨ���ƶ��ͻ����˽��ͻ����Ƶ�ͨ���ı���ʱ�������нṹ��ʵ���ڼ�Ҳδ���ƻ�
Ƶ��3���ȣ����5����21���� [��ý���ļ�����.3]
Ӧ������������
���ǽ��������ͻ�����Ӧ����ʵ�ʵ���� �ڵ�ˮ�з��ֵ�P. laevis���Թ���Ϊ���ĵĹ��塣 ����Բ���ε����ؾ��в�����
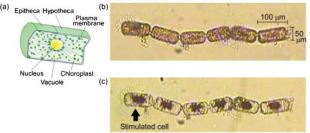
�ṹ��������ǣ������Լ1.3mm����100mm��ֱ��40-80mm����ͼ9��a����ʾ��23��λ�ڵ�ص����ġ� ����ϸ������200����״��10���׳���Ҷ���塣 ͨ��������ϸ��ͨ��ճҺ������һ��
��ͼ9��b����ʾ���ӷ������ͻ��������ʡ�
����ϸ�����ֳ����ص���Ϊ����ϸ���ܵ��̼�ʱ��ϸ���ڵ�Ҷ������ϸ������Χ�ۼ��� ���⣬
���־ۼ���Ϊ�����ݸ��������ӵĵ�Ԫ����ͼ9��c����ʾ�� ��Ȥ���ǣ�������Ϊ�������ݸ�δ���ӵ�ϸ���� ������Ϊ�Ĵ���������δ֪����ӵ��ͷţ����������ܴ̼�ϸ�������ʣ��Դ̼���������������ϸ���� ������Ϊ����Ϊ����Ԫ������Ϣ���ơ� ����ѧ�ͻ������������ȼ�ϵĽǶ�������������Ϊ�ĵ��齫����������ˮ������֮��Ĺ�ͨ���ơ� �ۼ���Ϊ���ɹ��̼�����ģ���������Ϊ�Ļ��ƻ�����ȫ
ͼ9 P. laevis���ⲿ���������� ��a����ϸ�����ڲ��ṹ�������Բ��״���ʱ��档 ��b��ÿ��ϸ��ͨ��ճҺ��ճ�����壩������ϸ�����ӡ� ϸ��֮��û�нṹ�ϵ���ϵ�� ��c��Ҷ������ʹ������� ����Ҷ��������ʼλ��ת�Ƶ�����Χ�����ʱ��Ϊ5-15���ӡ� ��ȫ�����Լ3���ӿ�ʼ���գ�������е�Ҷ���嶼�ָ�����ʼλ��23
 24�ݱ�����P.laevis��Ҷ��������Ϊ����ͨ����е�̼��յ�23,25���о���Աʹ����ɹ��ش̼��˵�ϸ���� Ȼ�������ַ������������ȶ��ش̼�����ϸ������Ϊ����ʹ���ֶ�����Ͳ�������ɵġ� ��Щ�о�����˵��Ӧ������P. laevis�ķ�Ӧ֮��Ĺ�ϵ�� ��ˣ������ʩ�ӵ��������ж����о����Բ���P.laevis��Ҷ�����ڻ�е�̼��µľۼ���Ϊ�� ������������ڴ�Ŀ�ģ���Ϊ�ۺϵ���Ӧ�ٶ���Խ���������������������
24�ݱ�����P.laevis��Ҷ��������Ϊ����ͨ����е�̼��յ�23,25���о���Աʹ����ɹ��ش̼��˵�ϸ���� Ȼ�������ַ������������ȶ��ش̼�����ϸ������Ϊ����ʹ���ֶ�����Ͳ�������ɵġ� ��Щ�о�����˵��Ӧ������P. laevis�ķ�Ӧ֮��Ĺ�ϵ�� ��ˣ������ʩ�ӵ��������ж����о����Բ���P.laevis��Ҷ�����ڻ�е�̼��µľۼ���Ϊ�� ������������ڴ�Ŀ�ģ���Ϊ�ۺϵ���Ӧ�ٶ���Խ���������������������
Ϊ��ʵ�飬���Ӻ����ռ�����ˮ���뵽оƬ�ϡ� Ȼ��ͨ����оƬ�ⲿ�ƶ����彫�ͻ����˴Ӳ���롣 ��ʱ�������xyhλ���ɸ��˼�������ݲ���Ա�ò��ݸ˷�����������Ƶĵ綯ƽ̨������ ʹ��1.0mmֱ�����������彫����ʩ�ӵ��������ϵ������ˡ� Ȼ��ͨ�������廷�����ƶ������ʵ��Ƭ�Ϸ��룬�������в�ṹû���κ��� ����ȷ�ϣ����ڰ��ڽṹ���Ź辧Ƭ�ľ���ȡ�����У����Ի����˱����شӲ���ȥ�������γɹ���м�� ÿ���ͻ����˵Ŀ��ƶ���ΧԼΪ230����2�� ��Ȼ�����ǿ��Ժ����������ͻ����˵Ĺ����ռ䣬��������оƬ��xyh�Σ�400mm2���Ŀ��ƶ���Χ�ڵijߴ硣 ֮��P. laevis��оƬ����ڱ����룬����ϸ����λ�����ͻ����˿��ơ� ��P.laevis��С�����˵�ϸ��������ͬһ����������30���ӣ����������Ĺ�ǿ����С���Ա����κ������̼����أ�����ѧ��/���ѧЧӦ���� �ڵ�ϸ���Ĵ̼��۲�֮������һ��ʵ��֮ǰ����ˮϴ��оƬ��
ͼ10��a����ʾ��ʵ��ĸſ��� ����ȷ�Ͽ����Ļ��������㹻����������P. laevis�����; �����������Ա�����ء� ��������dzɹ��ȶ��ش̼���P. laevis��һ��ϸ���� Ȼ����ͼ10��b����ʾ��������ʩ�ӵ����� ��ͼ10��c���е�ԭʼͼ����ʾ���̼���ʹ��CCD������۲�Ҷ�����顣 ����Щͼ���У�Ҷ�����С�����̼��˶��������֤ʵ�� Ȼ��Ϊ������Ҷ������ij̶ȣ�ͨ���ӵ�һͼ���м�ȥÿ��ͼ����0���Ӵ���������Ӱͼ���һ���ÿ����Ӱͼ�������ֵ���ܺͣ���ͼ10��c ���� ͨ���趨�ʵ�����ֵ�����ǿ���ȷ���Ƿ���ɾۼ��� ͼ10��d����ʾ��11��ϸ����ʵ���ܽᣬ����F�����ÿ�δ̼��������ֵ��FINT��ͨ������ʩ������ʱ�����н��л���������ġ� ������
���������Ӧ������Ӧ�ô̼�ֱ������ﵽ��������ޡ� ���⣬���ڸ��Ӿ����������˲ʱ�̼�������Чǿ��ϸ��֮��̼���Ӧ�IJ��졣
�����ʵ���У���������֪����ʷ������һ�Σ�����Щʵ�������£�����P.laevis�ۼ���Ϊ����Ĵ̼���ȷ��Ϊy2mN�� ��һ��������������Ļ�����ϵͳ�п���ͨ����е�̼�������������һ������˷ܼ���Ӧ�� ����ȱ������Ҷ����ۼ���������������������ӫ����������ͼ���������������ۼ��̶ȵĺ�ѡ��֮һ��
��δ���Ĺ����У����ǽ����Դ������ͼ���ж����������ϵľ���̶ȡ� ͬʱ�����ǿ��ܻῼ���ͻ����˵�ȫ�Զ�3-DOFλ�ÿ��ƣ��Դ̼����ᆱȷ��������Ӧ�ø�����ģʽ�Ļ�е�̼��� Ϊ��ȷ������̬�µ������������ǽ��������Ķ���ѧ������һ�����ڸ����о��ͻ����˵���ֵģ�͡� �������ţ����Ƕ��صĻ�����ϵͳ�����е����Ӧ���ܹ����õ�������������Ӻ�ѧ�������ϵ�δ֪������ơ�
Ŀǰ�������˵����в�ṹ�����Ϊ�������������Ӷ�����������������漰�����ѡ� �����ͻ����˶����о�����Ĵ̼�����������ġ� ���ǣ����ڸ��㷺��Ӧ�ã�������ͻ����˵�ĩ�˰�װһ�������ɶ������нṹ��26���⣬Ӧʹ�ü������͵�̽ͷ���Ƚ��ƶ������Ч��; �������о��У����Dz�����������̽�루��˽Ƕȣ�21.0u��������ʰ뾶��0.72mm��
ģ�´�ͳ�ķ���������ϸ����Ӧһ��
�ܼ�˼�����״Ӱ��23
����
���������һ�ֲ������Ƶģ������������ͻ����ˣ������������нṹ������ƺ����ṩ�˾���ƶ���Χ�ʹ��й��ܡ� δ���������ͻ�������ͨ��ʹ�ù�̺͵�Ƽ�������Ϲ����Si-Ni��Ͻṹ��ɡ� ��������ͨ�����۽ṹ�����룬�Ӷ�������Ħ���ͱ���
�䱸5������200���ߵ����������� ���ǵĻ���ʵ��Ľ��֤ʵ�����췽������Ч�Ժ���������
�����������3.0-3.5 mN���� ���ͨ��ʹ��������ͻ����ˣ����dzɹ������������IJ�����оƬ�д̼�P.laevis��Ч���� ��ʵ�������ƶ��Ժͺ�ţ�ټ��������Լ����в�ܵ��ͻ����˿������о�����δ֪��Ϊ���൱��Ҫ�Ĺ��ߡ� �ر��ǣ����ǵ�ƽ̨�ܹ������������м�Ӳ�ⲿ�ṹ��ˮ������Ļ�е�̼���
��л
������õ���JST-SENTAN��KAKENHI��23106002��24760204���������ݴ�ѧȫ��COE�ƻ�'������һ�廯�������о�COE'�;�������ѧԺ�����о���ǰ���о�ѧԺ�IJ���֧�֡�
ע�ͺͲο�
1 PM Lintilhac��TB Vesecky��Nature��1984,307��363-364��
2 G. Helmlinger��PA Netti��HC Lichtenbeld��RJ Melder��RK Jain��Nat��
3 Biotechnol����1997,15,778-783��
4 BS Kim��J. Nikolovski��J. Bonadio��DJ Mooney��Nat�� Biotechnol����1999,17,979-983��
5 CJ Meyer��FJ Alenghat��P. Rim��JH Fong��B. Fabry and
DE Ingber��Nat�� Cell Biol����2000,2,666-668��
6 C. Moraes��Y. Sun��CA Simmon��Integr�� Biol����2011,3,959-971��
7 T. Itabashi��Y. Terada��K. Kuwana��T. Kan��I. Shimoyama��S. Ishiwata��Proc�� ���ҿơ� ��ѧԺ�� ��ѧ�� USA��2012,109,7320-7325��
8 M. Uhlen��HA Svahn��Lab Chip��2011,11,3399-3393��
8 RE Teixeira��Green Chem����2012��14��419-427��
9 H. Lu��LY Koo��WM Wang��DA Lauffenburger��L.
G.Griffith��KFJensen��Anal�� Chem����2004,76,5257-5264��
10 JY Park��SJ Yoo��CM Hwangad��SH Lee��Lab Chip��2009,9,2194-2202��
11 Y. Sun��BJ Nelson��DP Potasek��E. Enikov��J. Micromech�� Microeng����2002,12,832-840��
12 Y. Shen��MR Ahmad��M. Nakajima��S. Kojima��M. Homma��T. Fukuda��IEEE Trans�� NanoBiosci����2011,10,217-224��
13 DJ Cappelleri��G. Piazza��V. Kumar��Proc�� IEEE Int�� CONF�� ���������Զ�����2009,1016-1021��
14 K.Ikuta��F. Sato��K.Kadoguchi��S.Itoh��2008 IEEE 21�����ӻ�еϵͳ���ʻ��飬2008,539-542��
15 K. Onda��F. Arai��Opt�� Express��2012,20,3633-3641��
16 M. Hagiwara��T. Kawahara��Y. Yamanishi��F. Arai��Appl�� ����ѧ�� Lett����2010,97��013701-1-013701-3��
17 M. Hagiwara��T. Kawahara��Y. Yamanishi��T. Masuda��
L. Feng��F.Arai��Lab Chip��2011,11,2049-2054��
18 M. Gauthier��E. Piat��J. Micromechatronics��2004,2,87-119��
19 JJ���࣬KE Peyer��MC Lagomarsino��L. Zhang��
A. Dong��IK Kaliakatsos��BJ Nelson��Int�� J. Rob�� Res����2009,28,1434-1447��
20 C.Pawashe��S. Floyd��M. Sitti��Int�� J. Rob��Res����2009,28,1077-1094��