“ΜΓΔ±ΨΩΈΧβά¥‘¥ΦΑ―–ΨΩΒΡΡΩΒΡΚΆ“β“ε
¥σ¥–‘ΎΈ“Ιζ“―”–3000ΕύΡξΒΡ‘‘÷≤άζ ΖΘ§¥σ¥–ΗΜΚ§Εύ÷÷ΈΔΝΩ‘ΣΥΊΘ§”–ΧΊ βΒΡ–Νά±ΈΕΒάΘ§ΨΏ
ΝΦΚΟΒΡΒςΈΕΚΆ“ΫΝΤΙΠ–ßΓΘ¥σ¥–‘ΎΈ“Ιζ≤ΜΫω‘‘÷≤άζ Ζ”ΤΨΟΘ§Εχ«“‘‘÷≤ΟφΜΐ¥σΘ§”»Τδ «‘ΎΈ“Ιζ±±ΖΫΘ§–Έ≥…ΝΥ–μΕύΨΏ”–ΒΊΖΫΧΊ…ΪΓΔ»ΪΙζ÷ΣΟϊΒΡ¥σ¥–ΤΖ÷÷Θ§Τδ÷–ΫœΈΣ÷χΟϊΒΡ”–ΧλΫρΒΡΗΏΫ≈ΑΉΓΔ…¬ΈςΒΡ≥ύΥ°Ι¬¥–“‘ΦΑ…ΫΕΪ’¬«πΒΡ¥σΈύΆ©Β»ΓΘΥφΉ≈ΙζΦ“Ε‘ΓΑ»ΐ≈©Γ±Έ ΧβΒΡΙΊΉΔΕ»‘Ϋά¥‘Ϋ¥σΘ§“‘ΦΑ≈©“Β÷÷÷≤ΫαΙΙΒΡΒς’ϊΘ§–μΕύΒΊΖΫΫΪ¥σ¥–÷÷÷≤ΉςΈΣΧΊ…Ϊ≤ζ“ΒΖΔ’ΙΘ§ ΙΒΟ¥σ¥–ΒΡ÷÷÷≤ΟφΜΐΫχ“Μ≤Ϋά©¥σΘ§»γ…ΫΕΪ’¬«πΓΔΧλΫρ±ΠέφΚΆΑ≤Μ’ΝΌ»Σȼ«χΒΡ¥σ¥–÷÷÷≤ΟφΜΐ…θ÷Ν≥§Ιΐ10ΆρΡΕΓΘΕχ«“¥σ¥–ΒΡ÷÷÷≤ «‘Ύ6÷Ν7‘¬ΖίΘ§ΧλΤχ―Ή»»Θ§»ΥΙΛΉς“ΒΜΖΨ≥≤νΘ§–߬ ΒΆΓΘΥυ“‘≈©ΟώΕ‘ Βœ÷¥σ¥–“Τ‘‘Μζ–ΒΜ·ΒΡ“Σ«σ‘Ϋά¥‘ΫΤ»«–Θ§Ά§ ±Ε‘“Τ‘‘ΜζΒΡ–‘Ρή“Σ«σ“≤‘Ϋά¥‘ΫΗΏΘ§“ρ¥Υ…ηΦΤ“ΜΩνΗΏ–‘ΡήΒΡ¥σ¥–“Τ‘‘ΜζΕ‘ Βœ÷≈©“ΒΜζ–ΒΜ·”–Ή≈ °Ζ÷÷Ί“ΣΒΡ“β“εΓΘΩ…“‘ΧαΗΏ¥σ¥–‘‘÷≤Ιΐ≥Χ÷–»ΥΝΠΚΆΈοΝΠΉ ‘¥ΒΡάϊ”Ο¬ Θ§ΫΒΒΆ≥…±ΨΘ§Ά§ ±“≤ΧαΗΏΝΥάΆΕ·…ζ≤ζ¬ ΚΆ¥σ¥–‘‘÷≤÷ ΝΩΓΘ
ΕΰΓΔ±ΨΩΈΧβΥυ…φΦΑΒΡΈ Χβ‘ΎΙζΡΎΘ®ΆβΘ©―–ΨΩœ÷Ή¥ΦΑΖ÷Έω
 Ε‘”Ύ“Τ‘‘ΜζΒΡ―–ΨΩΈό¬έ «ΙζΆβΜΙ «ΙζΡΎΕΦ»ΓΒΟΝΥ“ΜΕ®ΒΡ―–ΨΩ≥…ΙϊΓΘΡΩ«ΑΘ§ –Οφ…œΝς––ΒΡ“Τ‘‘Μζ”–Βθ±≠ ΫΓΔΒΦΟγΙή ΫΓΔΡ”–‘‘≤≈Χ Ϋ“‘ΦΑΝ¥Φ– ΫΓΘ»ΈΚΈ“Μ÷÷“Τ‘‘ΜζΕΦ”–ΤδΉ‘…μΒΡΧΊΒψΘ§ΡήΙΜ ”ΠΡ≥÷÷ΜρΡ≥–©ΉςΈοΒΡ“Τ‘‘Θ§ΒΪ «ΕΦ≤ΜΨΏ”–Τ’±ι Ι”Ο–‘ΓΘΡΩ«ΑΙζΡΎœ÷”–ΒΡ“Τ‘‘Μζ÷ς“Σ ”Ο”Ύ”ώΟΉΓΔΟόΜ®ΓΔ―ΧΟγΒ»¥σ÷ξΨύΓΔ–Γ÷ξΗΏΉςΈο“Τ‘‘ΓΘΕ‘”Ύ¥σ¥–“Τ‘‘ΜζΘ§ΙζΡΎ―–ΨΩΫœ…ΌΘ§ΙζΆβ―–ΨΩ÷ς“Σ‘Ύ»’±ΨΘ§»’±ΨΒΡ¥σ¥–“Τ‘‘Μζ≤ζΤΖ–η“Σ”κœύ”ΠΒΡ≈©“’œύ≈δΚœΘ§≤Μ ”ΠΈ“Ιζ¥σΧο”ΐΟγΒΡœ÷Ή¥ΓΘ
Ε‘”Ύ“Τ‘‘ΜζΒΡ―–ΨΩΈό¬έ «ΙζΆβΜΙ «ΙζΡΎΕΦ»ΓΒΟΝΥ“ΜΕ®ΒΡ―–ΨΩ≥…ΙϊΓΘΡΩ«ΑΘ§ –Οφ…œΝς––ΒΡ“Τ‘‘Μζ”–Βθ±≠ ΫΓΔΒΦΟγΙή ΫΓΔΡ”–‘‘≤≈Χ Ϋ“‘ΦΑΝ¥Φ– ΫΓΘ»ΈΚΈ“Μ÷÷“Τ‘‘ΜζΕΦ”–ΤδΉ‘…μΒΡΧΊΒψΘ§ΡήΙΜ ”ΠΡ≥÷÷ΜρΡ≥–©ΉςΈοΒΡ“Τ‘‘Θ§ΒΪ «ΕΦ≤ΜΨΏ”–Τ’±ι Ι”Ο–‘ΓΘΡΩ«ΑΙζΡΎœ÷”–ΒΡ“Τ‘‘Μζ÷ς“Σ ”Ο”Ύ”ώΟΉΓΔΟόΜ®ΓΔ―ΧΟγΒ»¥σ÷ξΨύΓΔ–Γ÷ξΗΏΉςΈο“Τ‘‘ΓΘΕ‘”Ύ¥σ¥–“Τ‘‘ΜζΘ§ΙζΡΎ―–ΨΩΫœ…ΌΘ§ΙζΆβ―–ΨΩ÷ς“Σ‘Ύ»’±ΨΘ§»’±ΨΒΡ¥σ¥–“Τ‘‘Μζ≤ζΤΖ–η“Σ”κœύ”ΠΒΡ≈©“’œύ≈δΚœΘ§≤Μ ”ΠΈ“Ιζ¥σΧο”ΐΟγΒΡœ÷Ή¥ΓΘ
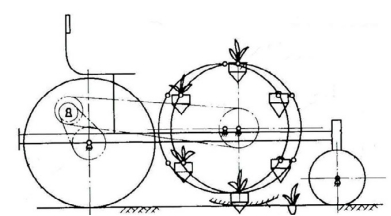
1.Βθ±≠ Ϋ“Τ‘‘Μζ
Βθ±≠ Ϋ“Τ‘‘ΜζΘ§»γΆΦ2-1Υυ ΨΘ§÷ς“Σ”…‘‘÷≤‘≤≈ΧΓΔΤΪ–Ρ‘≤≈ΧΓΔΒΦΙλΓΔΒθ±≠Β»Ήι≥…ΓΘΉς“Β ±Θ§Βθ±≠ Φ÷’¥Ι÷±ΒΊΟφΘ§≤ΔΥφΉ≈‘≤≈ΧΉΣΕ·Θ§Β±Βθ±≠ΉΣΕ·ΒΫ…œ≤Ω ±Θ§»ΥΙΛΫΪ―μΟγΖ≈»κΒθ±≠÷–Θ§Β±ΉΣΕ·ΒΫ‘ΛΕ®ΈΜ÷Ο ±Θ§Βθ±≠ΒΉ≤ΩΒΡ―ΦΉλ‘ΎΒΦΙλΒΡΉς”Οœ¬±Μ―ΙΩΣΘ§―μΟγ¬δ»κ―®ΡΎ,ΥφΚσΗ≤ΆΝ’ρ―ΙΉΑ÷ΟΫχ––Η≤ΆΝ’ρ―ΙΘ§Άξ≥…‘‘÷≤ΓΘΒθ±≠Ά―άκΒΦΙλΚσΘ§‘ΎΒ·Μ…ΒΡΉς”Οœ¬÷Ί–¬±’ΚœΘ§“‘¥Υ―≠ΜΖΓΘΒθ±≠ Ϋ“Τ‘‘Μζ‘Ύ‘‘÷≤Ιΐ≥Χ÷– Ι―μΟγ≤Μ ή≥εΜςΘ§ ΆΦ2-1Βθ±≠ Ϋ“Τ‘‘Μζ
ΒΪΈΙΟγΥΌΕ»ΒΆΘ§ Κœ Κœ”Ύ÷ξΨύΫœ¥σΒΡ≤ßΟγ“Τ‘‘ΓΘ
2.ΒΦΟγΙή Ϋ“Τ‘‘Μζ
ΒΦΟγΙή Ϋ“Τ‘‘ΜζΘ§»γΆΦ2-2Υυ ΨΘ§÷ς“Σ”…ΈΙ»κΤςΓΔΒΦΟγΙήΓΔΖωΟγΤςΓΔΩΣΙΒΤςΓΔΗ≤ΆΝ’ρ―Ι¬÷ΚΆΟγΦήΒ»Ήι≥…ΓΘΉς“Β ±Θ§»ΥΙΛΫΪ―μΟγΆΕ»κΒΫΈΙ»κΤςΒΡΈΙΟγΆ≤ΡΎΘ§Β±ΈΙΟγΆ≤ΉΣΒΫΒΦΟγΙήΒΡ…œΖΫ ±Θ§ΜνΟ≈¥ρΩΣΘ§―μΟγ“άΩΩΉ‘…μ÷ΊΝΠΉς”ΟΘ§¬δ»κΒΦΟγΙήΡΎΘ§”…ΒΦΟγΙήΫΪ―μΟγ“ΐ»κΟγΙΒΡΎΘ§Ά®ΙΐΖωΟγΤςΒΡΉς”ΟΘ§―μΟγ±Θ≥÷÷±ΝΔΉ¥Χ§Θ§»ΜΚσΗ≤ΆΝ’ρ―ΙΘ§Άξ≥…‘‘÷≤ΓΘΒΦΟγΙή Ϋ“Τ‘‘Μζ≤Μ…ΥΟγΓΔΫœΚΟ±Θ≥÷―μΟγ“Τ‘‘ΚσΒΡ÷±ΝΔ–‘Θ§‘‘÷≤ΤΒ¬ ‘Ύ 40~60 ÷ξ/minΓΘ
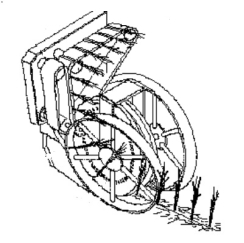
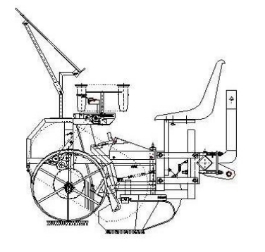
ΆΦ2-2ΒΦΟγΙή Ϋ“Τ‘‘Μζ ΆΦ2-3Ρ”–‘‘≤≈Χ Ϋ Ϋ“Τ‘‘Μζ
3.Ρ”–‘‘≤≈Χ Ϋ“Τ‘‘Μζ
Ρ”≈Χ Ϋ“Τ‘‘ΜζΘ§»γΆΦ2-3Υυ ΨΘ§÷ς“Σ”…Ι©Ογ δΥΆ¥χΓΔΡ”–‘≈ΧΓΔ’ρ―Ι¬÷ΓΔ“‘ΦΑ¥ΪΕ·œΒΆ≥Ήι≥…ΓΘΉς“Β ±Θ§»ΥΙΛΫΪ―μΟγΖ≈»κΙ©Ογ δΥΆ¥χ…œΘ§Ι©Ογ δΥΆ¥χ…œΒ»ΨύΑ≤ΉΑœπΫΚΩιΓΘ δΥΆ¥χΫΪ―μΟγΈΕ»κΡ”≈ΧΡΎΘ§―μΟγΥφΡ”≈Χ–ΐΉΣΒΫΚœ ΈΜ÷ΟΘ§Ρ”≈Χ¥ρΩΣΘ§―μΟγΫχ»ΞΩΣΚΟΒΡΙΒΡΎΘ§»ΜΚσΗ≤ΆΝ’ρ―ΙΘ§Άξ≥…‘‘÷≤ΓΘΡ”≈Χ Ϋ“Τ‘‘ΜζΕ‘―μΟγ÷ξΨύΒΡ ”Π–‘ΫœΚΟΘ§ΒΪ‘‘÷≤…νΕ»≤ΜΈ»Ε®Θ§ΈόΖ®±Θ÷Λ―μΟγΒΡΗΏ÷±ΝΔ–‘ΓΘ
 4.Ν¥Φ– Ϋ“Τ‘‘Μζ
4.Ν¥Φ– Ϋ“Τ‘‘Μζ
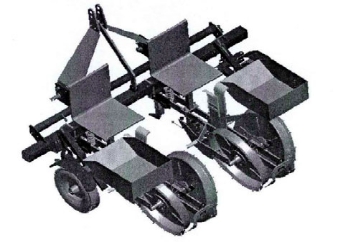
Ν¥Φ– Ϋ“Τ‘‘ΜζΘ§»γΆΦ2-4Υυ ΨΘ§÷ς“Σ”…ΜζΦήΓΔΒΦΙλΓΔΟγΦ–ΓΔ’ρ―Ι¬÷Β»Ήι≥…ΓΘΉς“Β ±Θ§»ΥΙΛΫΪ―μΟγΖ≈ΒΫΟγΦ–…œΘ§―μΟγ±ΜΟγΦ–Φ–≥÷Θ§‘ΎΝ¥Χθ¥χΕ·œ¬ΉΣΕ·Θ§Β±―μΟγΉΣ÷ΝΟγΙΒ ±Θ§ΟγΦ–‘ΎΒΦΙλΉς”Οœ¬±Μ¥ρΩΣΘ§―μΟγ¬δ»κΟγΙΒ÷–Θ§»ΜΚσΗ≤ΆΝ’ρ―ΙΘ§Άξ≥…‘‘÷≤ΓΘœ÷”–ΒΡΝ¥Φ– Ϋ“Τ‘‘Μζ‘‘÷≤÷ξΨύΉΦ»ΖΘ§‘‘÷≤Κσ―μΟγΒΡ÷±ΝΔΕ»ΫœΚΟΘ§ΈΙΟγΥΆΟγΈ»Ε®Ω…ΩΩΓΘΒΪΝψΥΌΆΕΟγ–ßΙϊ≤ΜΚΟΘ§“Ή…ΥΟγΘ§»ί“Ή‘λ≥…―μΟγΒΡ¬©‘‘ΓΘ
ΆΦ2-4Ν¥Φ– Ϋ“Τ‘‘Μζ
»ΐΓΔΕ‘ΩΈΧβΥυ…φΦΑΒΡ»ΈΈώ“Σ«σΦΑ Βœ÷‘ΛΤΎΡΩ±ξΒΡΩ…–––‘Ζ÷Έω
1. »ΈΈώ“Σ«σΘΚ¥σ¥–‘‘÷≤…νΕ»Ϋœ…ν“ΜΑψΈΣ 15cm Ήσ”“Θ§≤Δ‘ΎΚσΤΎΫχ––≤ψ≤ψΗ≤ΆΝΘ§¥–ΑΉΒΡ÷ ΝΩ÷±Ϋ””Αœλ¥σ¥–ΒΡ÷ ΝΩΘ§“ρ¥Υ“ΣΕ≈Ψχ¥–Ογ“Τ‘‘ ±Έ―ΗυΓΘΙζΡΎΥδ“≤”–Ε‘¥σ¥–“Τ‘‘ΜζΒΡ―–÷ΤΘ§ΒΪ «¥–Ογ»κΙΒ ±≤ΜΡή±Θ÷ΛΝψΥΌΆΕΟγΘ§Μα‘λ≥…¥–ΟγΒΡ«ψ–±ΓΔΈ―ΗυΘ§÷±Ϋ””Αœλ¥σ¥–ΒΡ÷ ΝΩΓΘ“ρ¥ΥΘ§ΗυΨί“‘…œ¥σ¥–“Τ‘‘ΒΡΧΊ–‘Θ§…ηΦΤΝΥ“ΜΩνΝ¥Φ– Ϋ¥σ¥–“Τ‘‘ΜζΓΘ
2.Ω…–––‘Ζ÷ΈωΘΚ
Θ®1Θ©“Τ‘‘ΜζΒΡ’ϊΧεΜζΙΙ…ηΦΤΘ§ΈΣΝΥ Βœ÷¥σ¥–“Τ‘‘ ±ΒΡΝψΥΌΆΕΟγΘ§―Γ‘ώΚœ ΒΡ¥ΪΕ·ΖΫΑΗΘ§Ϋχ––άμ¬έΦΤΥψΓΘ
Θ®2Θ©“Τ‘‘ΜζΚΥ–Ρ≤ΩΖ÷ΈΣΈΙΟγΚΆΆΕΟγΜζΙΙΝΫΗω≤ΩΖ÷Θ§ δΥΆΝ¥ΒΡ‘Υ––ΤΫΈ»–‘÷±Ϋ””ΑœλΒΫΟγΦ–»ΓΟγΒΡΉΦ»Ζ–‘ΓΘ
Θ®3Θ©Ε‘”Ύ“Τ‘‘Μζ÷ς“ΣΒΡΝψ≤ΩΦΰΫχ––Ε·ΝΠ―ßΖ÷ΈωΘ§»γΟγΦ–ΓΔΩΣΙΒΤςΓΔΦ–ΫτΒΦΙλΓΔœόΈΜΒΦΙλΒ»Θ§±Θ÷ΛΜζΙΙ…ηΦΤΒΡΚœάμ–‘ΓΘ
Θ®4Θ©ΗυΨίΖ÷ΈωΫαΙϊΘ§Ε‘ΖΫΑΗΫχ––ΗΡ…ΤΘ§Ϋχ––―υΜζ ‘÷ΤΘ§Ϋχ––ΧοΦδ ‘―ιΓΘ
ΥΡΓΔ±ΨΩΈΧβ–η“Σ÷ΊΒψ―–ΨΩΒΡΓΔΙΊΦϋΒΡΈ ΧβΦΑΫβΨωΒΡΥΦ¬Ζ
±ΨΩΈΧβ―–ΨΩΒΡ÷ΊΒψ «ΆΕΟγΜζΙΙΘΚ÷ς“ΣΈ Χβ «ΓΑΝψΥΌΆΕΟγΓ±ΓΘΕ‘”Ύ¥σ¥–ΧΊ βΒΡ“Σ«σΘΚΗΏ÷±ΝΔ–‘ΓΔ–Γ÷ξΨύΓΔΗ≤ΆΝ…νΒ»Θ§…ηΦΤΝΥΝ¥Φ– Ϋ¥σ¥–“Τ‘‘ΜζΘ§Αϋά®ΥΡ≤ΩΖ÷ΘΚΈΙΟγΜζΙΙΓΔΆΕΟγΜζΙΙΓΔΜζΦήΚΆ¥ΪΕ·œΒΆ≥ΓΘ
1. ΈΙΟγΜζΙΙΘΚΗΟΜζΙΙ÷ς“Σ≤ΩΖ÷ « δΥΆ¥χΚΆΟγ≤έΘ§ δΥΆ¥χΗυΨί“Τ‘‘Ής“Β“Σ«σ…ηΦΤΚœάμΘ§Ογ≤έΑ≤ΉΑ‘Ύ δΥΆ¥χ…œΘ§¥σ¥–“Τ‘‘ΒΡ÷ξΨύΒ»”ΎΟγ≤έ÷°ΦδΒΡΨύάκΓΘΗΟΉΑ÷Ο÷ς“ΣΤπΒΫ“ΜΗωœΈΫ”Ής”ΟΘ§≤ΌΉς»Υ‘±ΫΪ ΔΖ≈‘ΎΟγœδ÷–ΒΡ¬ψ¥–Ογ“ΜΩΟ“ΜΩΟΖ≈»κΟΩΗωΟγ≤έ÷°÷–Θ§¥–ΟγΥφΉ≈Ογ≤έ”…Υ°ΤΫΉΣΈΣ ζ÷±‘ΥΕ·Θ§ΒΫ¥οΚœ ΈΜ÷ΟΚσΘ§±ΜΑ≤ΉΑ‘ΎΆΕΟγΜζΙΙΒΡΟγΦ–Φ–»ΓΓΘ
2. ΆΕΟγΜζΙΙΘΚΗΟΜζΙΙ÷ς“ΣΑϋά®œόΈΜΒΦΙλΓΔΦ–ΫτΒΦΙλΓΔΟγΦ–ΚΆ δΥΆ¥χΓΘΟγΦ–Α≤ΉΑ‘Ύ δΥΆ¥χΒΡΟΩΗωΝ¥ΫΎ…œΘ§ΤδΦδΨύΒ»”ΎΟγ≤έΒΡΦδΨύΦ¥¥σ¥–÷ξΨύΘ§œόΈΜΒΦΙλ÷ς“ΣΕ‘Ν¥ΧθΑΎΕ·ΤπΒΫœό÷ΤΉς”ΟΓΘΦ–ΫτΒΦΙλ÷ς“ΣΩΊ÷ΤΟγΦ–ΒΡΩΣ±’Θ§Ά®ΙΐΝΫΒΦΙλ÷°ΦδΒΡΨύάκά¥ Βœ÷ΟγΦ–Ϋχ»κΦ–ΫτΒΦΙλΚσ÷πΫΞ±’ΚœΘ§Φ–Ϋτ¥–ΟγΘ§»ΜΚσ‘ΎΚœ ΒΡΈΜ÷Ο÷πΫΞ¥ρΩΣΆξ≥…ΆΕΟγΓΘΦ–ΫτΒΦΙλ ΙΟγΦ–÷πΫΞ±’ΚœΘ§ «ΈΣΝΥ±ήΟβ¥–Ογ±ΜΦ–»Γ ±‘λ≥…ΒΡΥπ…ΥΘ§Ά§ ±“≤Φθ–ΓΝΥ”…”ΎΆΜ±δ“ΐΤπΒΡΜζΙΙ‘ΥΕ·≥εΜςΓΘ
Ά®ΙΐΕ‘ΈΙΟγΜζΙΙΚΆΆΕΟγΜζΙΙΒΡΚœάμ…ηΦΤΚΆΑ≤ΉΑΘ§ Βœ÷ΟγΦ–‘Ύ ζ÷±ΖΫœρΘ§”κΕ‘”ΠΒΡΟγ≤έΗΏΕ»“Μ÷¬Θ§±Θ÷ΛΉΦ»ΖΦ–»ΓΟγ≤έ÷–ΒΡ¥–ΟγΘΜ‘ΎΈΙΟγΜζΙΙΓΔΆΕΟγΜζΙΙΚΆΆœά≠Μζ÷°ΦδΆ®ΙΐΚœάμΒΡ¥ΪΕ·ΖΫΑΗΘ§ Βœ÷ΟγΦ–ΚΆΟγ≤έ‘Ύ ζ÷±ΖΫœρ‘ΥΕ·ΒΡΆ§≤ΫΘ§“‘ΦΑΟγΦ–‘ΎΉςΥ°ΤΫΖΫœρ‘ΥΕ· ±ΥΌΕ»”κ“Τ‘‘Μζ«ΑΫχΒΡΥΌΕ»¥σ–ΓœύΒ»ΓΔΖΫœρœύΖ¥Θ§ Βœ÷ΝψΥΌΆΕΟγΓΘ
≤ΌΉς»Υ‘±œρΟγ≤έΖ≈Ογ «‘ΎΟγ≤έΒΡΥ°ΤΫ‘ΥΕ·ΕΈΘ§ΥφΦ¥Ογ≤έΉΣΈΣ ζ÷±‘ΥΕ·Θ§Β±¥–ΟγΥφΉ≈Ογ≤έΉΣΈΣ ζ÷±‘ΥΕ·ΚσΘ§œύ”ΠΒΡΟγΦ–“≤Ϋχ»κ ζ÷±ΙλΒάΘ§‘Ύ Β±ΈΜ÷ΟΘ§ΟγΦ–÷πΫΞΦ–ΫτΘ§Φ–ΉΓΕ‘”ΠΟγ≤έ÷–ΒΡ¥–ΟγΓΘΈΙΟγΜζΙΙΚΆΆΕΟγΜζΙΙΒΡΦΧ–χ‘ΥΕ·Θ§Β±Ογ≤έΒΡ‘ΥΕ·ΖΫœρΤΪάκ ζ÷±‘ΥΕ· ±Θ§¥–ΟγΚΆΟγ≤έΖ÷άκΓΘΟγΦ–ΥφΆΕΟγ δΥΆ¥χΦΧ–χ‘ΥΕ·Θ§Β±ΟγΦ–ΉΣΙΐ90ΓψΚσΘ§ΉΣΈΣΥ°ΤΫ‘ΥΕ·Θ§ΤδΥΌΕ»”κ“Τ‘‘Μζ«ΑΫχΒΡΥΌΕ»¥σ–ΓœύΒ»ΓΔΖΫœρœύΖ¥Θ§ Βœ÷‘Ύ“ΜΕΈ ±ΦδΡΎΒΡ¥–ΟγœύΕ‘”ΎΒΊΟφΥΌΕ»ΈΣΝψΘ§‘Ύ’βΤΎΦδΆξ≥…Ε‘¥–ΟγΒΡΗ≤ΆΝΚΆ’ρ―ΙΘ§÷°ΚσΟγΦ–‘ΎΦ–ΫτΒΦΙλΒΡΩΊ÷Τœ¬Θ§÷πΫΞ¥ρΩΣΖ≈ΩΣ¥–ΟγΓΘ”…”ΎΟγΦ–ΉςΥ°ΤΫ‘ΥΕ·”–“ΜΗω ±ΦδΕΈΘ§Η≤ΆΝ’ρ―ΙΉΑ÷Ο”–≥δΖ÷ ±Φδ‘Ύ¥–ΟγœύΕ‘ΒΊΟφΥΌΕ»ΈΣΝψΒΡ«ιΩωœ¬Ε‘¥–ΟγΗ≤ΆΝ―Ι ΒΘ§“ρ¥Υ“Τ‘‘ΚσΒΡ¥–Ογ÷±ΝΔ–‘ΚΟΓΔ÷ξΨύΨυ‘»Β»ΓΘ
ΈεΓΔΆξ≥…±ΨΩΈΧβΥυ±Ί–κΒΡΙΛΉςΧθΦΰΦΑΫβΨωΒΡΑλΖ®
1. άϊ”ΟΆρΖΫ ΐΨίΩβΚΆ÷–Ιζ÷ΣΆχ≤ι‘ΡœύΙΊΉ ΝœΘ§ΝΥΫβ¥σ¥–“Τ‘‘ΜζΒΡΖΔ’Ιœ÷Ή¥ΓΘ
2. »ΖΕ®…ηΦΤΖΫΑΗΓΘ
ΓΓ3. ≤ι‘ΡœύΙΊΉ ΝœΘ§ΝΥΫβ¥σ¥–“Τ‘‘ΜζΘ§“‘»ΖΕ®ΖΫΑΗ÷–Υυ–ηΒΡΜζΙΙΓΘ
4. ”ωΒΫΙΊΦϋ–‘ΒΡΈ Χβœράœ Π«κΫΧΓΘ
ΓΓ5. άϊ”ΟΕΰΈ§»μΦΰCADΓΔSW»μΦΰΜφ÷Τ»ΐΈ§ΉΑ≈δΆΦΚΆΝψΦΰΆΦΓΘ
ΓΓ6. ≤ΈΩΦΉ Νœ÷–ΒΡΦΤΥψΖΫΖ®ΦΑΙΪ ΫΒ»Ϋχ––ΦΤΥψ–ΘΚΥΓΘ
ΝυΓΔΆξ≥…±ΨΩΈΧβΒΡΙΛΉςΖΫΑΗΦΑΫχΕ»ΦΤΜ°
ΒΎ1÷ήΓΣΒΎ2÷ή Ά®Ιΐ≤ι’“ΈΡœΉΉ ΝœΘ§ΝΥΫβΖΔ’Ιœ÷Ή¥ΓΘ
ΒΎ3÷ήΓΣΒΎ4÷ή …ηΦΤΉήΧεΖΫΑΗΓΘ
ΒΎ5÷ήΓΣΒΎ9÷ή ΫαΙΙΫχ––ΨΏΧε…ηΦΤΓΘ
ΒΎ10÷ήΓΣΒΎ13÷ή ΉΪ–¥…ηΦΤΥΒΟς ιΘ§Ε‘≤ΩΖ÷Έ Χβ–όΗΡΓΔΒς’ϊΓΘ
ΒΎ14÷ή ’ϊάμΉ ΝœΉΦ±Η¥π±γΓΘ
ΤΏΓΔ÷ς“Σ≤ΈΩΦΈΡœΉ
[1] ΜΤ”ΎΟςΘ§’‘’¬÷“±ύ÷χ.¥–Υβάύ Ώ≤Υ‘‘≈ύΦΦ θ[M].…œΚΘΩΤ―ßΦΦ θ≥ωΑφ…γΘ§1996.
[2] θκΝΦΙσΘ§ΦΆΟϊΗ’.Μζ–Β…ηΦΤ[M].±±Ψ©:ΗΏΒ»ΫΧ”ΐ≥ωΑφ…γΘ§2001.6.
[3] ≥…»Υœ».Μζ–Β…ηΦΤ ÷≤αΒΎ 3 Ψμ[M].±±Ψ©:Μζ–ΒΙΛ“Β≥ωΑφ…γΘ§2008.1.
[4] άν±ΠΖΛ.≈©“ΒΜζ–Β―ß[M].±±Ψ©:÷–Ιζ≈©“Β¥σ―ß≥ωΑφ…γΘ§2003.7.
[5] ΙΰΕϊ±θΙΛ“Β¥σ―ßάμ¬έΝΠ―ßΫΧ―– “.άμ¬έΝΠ―ßΒΎΝυΑφ[M].±±Ψ©:ΗΏΒ»ΫΧ”ΐ≥ωΑφ…γΘ§2002.
[6] ―νΩ…ηεΘ§≥ΧΙβ‘ΧΘ§άν÷Ό…ζ.Μζ–Β…ηΦΤΜυ¥ΓΒΎΈεΑφ[M].±±Ψ©:ΗΏΒ»ΫΧ”ΐ≥ωΑφ…γΘ§2007.
[7] ΈδΩΤΘ§≥¬”ά≥…Θ§±œ–¬ Λ.ΦΗ÷÷Βδ–ΆΒΡ“Τ‘‘Μζ[J].–¬Ϋ°≈©ΜζΜ·Θ§2009(03)ΘΚ12-14.
[8] ΚΪ’Φ»ΪΘ§ΖβΩΓΘ§‘χΑ°Ψϋ.Έ“ΙζΚΒΒΊ‘‘÷≤Μζ–ΒΒΡœ÷Ή¥ΚΆΖΔ’Ι«ΑΨΑ[J].œ÷¥ζΜ·≈©“ΒΘ§
2000(08)ΘΚ29-31.
[9] ΚζΨϋΘ§ΖβΩΓΘ§‘χΑ°ΨϋΘ§«ΊΙσ,Άθ”άΧΈ.¥σ¥–“Τ‘‘ΜζΒΡœ÷Ή¥”κΖΔ’Ι«ΑΨΑ[J].≈©ΜζΜ·―–ΨΩΘ§
2002(01)ΘΚ39-41.
[10] Ϋπ≥œ«ΪΘ§Έβ≥γ”―Θ§‘§ΈΡ Λ.Ν¥Φ– Ϋ“Τ‘‘Μζ‘‘÷≤Ής“Β÷ ΝΩ”Αœλ“ρΥΊΖ÷Έω[J].≈©“ΒΜζ–Β―ß±®
2008(09)ΘΚ196-198.
[11] ΩΉΉΩ.ΟόΜ®“Τ‘‘ΜζΒΡ–ιΡβ―υΜζ…ηΦΤ[D].…ΫΕΪάμΙΛ¥σ―ßΘ§2006.
[12] –ήΡΆ–¬.ΟόΜ®¬ψΟγ“Τ‘‘ΜζΙΙ…ηΦΤ”κ ‘―ι―–ΨΩ[D].ΚΰΡœ≈©“Β¥σ―ßΘ§2011.
[13] ≈ΥΤτΟς.―ν ςΥΌΖαΝ÷«Λ≤εΉς“ΒΦΦ θΉΑ±ΗΒΡ…ηΦΤ”κ―–ΨΩ[D].ΕΪ±±Ν÷“Β¥σ―ßΘ§2010.
[14] –ΛΈά±χ.―Χ≤ί“Τ‘‘Μζ‘‘÷≤ΤςΒΡ…ηΦΤ”κ ‘―ι―–ΨΩ[D].ΚΰΡœ≈©“Β¥σ―ßΘ§2010.
[15] ΚζΨϋ.Ρ”–‘‘≤≈Χ Ϋ¥σ¥–“Τ‘‘ΜζΒΡ”≈Μ·…ηΦΤ”κ ‘―ι―–ΨΩ[D].÷–Ιζ≈©“Β¥σ―ßΘ§2003.
[16] ’¬ ά–ψ.”Ά≤Υ“Τ‘‘ΜζΒΡ―–÷Τ[D].ΡœΨ©≈©“Β¥σ―ßΘ§2009.
