0引言
大葱在我国已有3000多年的栽植历史,大葱富含多种微量元素,有特殊的辛辣味道,具有良好的调味和医疗功效。大葱在我国不仅栽植历史悠久,而且栽植面积大,尤其是在我国北方,形成了许多具有地方特色、全国知名的大葱品种,其中较为著名的有天津的高脚白、陕西的赤水孤葱以及山东章丘的大梧桐等。随着国家对“三农”问题的关注度越来越大,以及农业种植结构的调整,许多地方将大葱种植作为特色产业发展,使得大葱的种植面积进一步扩大,如山东章丘、天津宝坻和安徽临泉等地区的大葱种植面积甚至超过10万亩。而且大葱的种植是在6-7月份,天气炎热,人工作业环境差,效率低。所以农民对实现大葱移栽机械化的要求越来越迫切,同时对移栽机的性能要求也越来越高,因此设计一款高性能的大葱移栽机对实现农业机械化有着十分重要的意义。可以提高大葱栽植过程中人力和物力资源的利用率,降低成本,同时也提高了劳动生产率和大葱栽植质量。
1总体设计思路
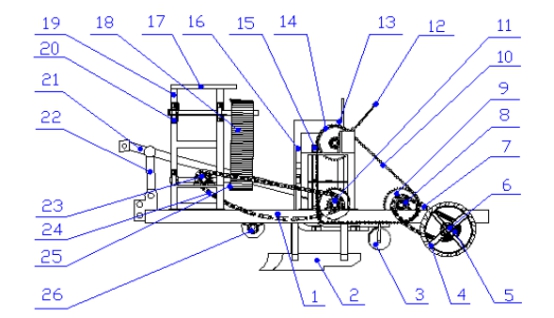
本课题研究的重点是投苗机构:主要问题是“零速投苗”。对于大葱特殊的要求:高直立性、小株距、覆土深等,设计了链夹式大葱移栽机,包括四部分:喂苗机构、投苗机构、机架和传动系统。
1.1设计原理
通过三点悬挂,悬挂在拖拉机上,由地轮提供动力,地轮带动同轴的第一传动链轮,然后经过第一传动链和第二传动链轮传递给投苗输送装置;再由投苗机构链轮带动第三传动链轮,由第二传动链和一对锥齿轮将动力传递给喂苗输送装置。苗夹和苗槽分别安装在投苗机构输送链和喂苗机构输送带上,两装置之间通过选择合适的传动比保证苗夹和苗槽在竖直方向的运动同步,以及苗夹运动到水平方向后,所夹持的葱苗速度能够与移栽机的速度大小相等、方向相反,即葱苗实现零速投苗。在合适的位置覆土镇压装置进行覆土镇压,之后苗夹再打开,放开葱苗,以此保证葱苗的零速投放是一个时间段,而不是一个点。同时为了保证葱苗在没进行覆土之前防止开沟后的土回流,影响葱苗的栽植深度,安装带有护板的芯铧式开沟器。
1.2设计总体结构
(1)喂苗机构:该机构主要部分是输送带和苗槽,输送带根据移栽作业要求设计合理,苗槽安装在输送带上,大葱移栽的株距等于苗槽之间的距离。该装置主要起到一个衔接作用,操作人员将盛放在苗箱中的裸葱苗一棵一棵放入每个苗槽之中,葱苗随着苗槽由水平转为竖直运动,到达合适位置后,被安装在投苗机构的苗夹夹取。
(2) 投苗机构:该机构主要包括限位导轨、夹紧导轨、苗夹和输送链。苗夹安装在输送链的每个链节上,其间距等于苗槽的间距即大葱株距,限位导轨主要对链条摆动起到限制作用。夹紧导轨主要控制苗夹的开闭,通过两导轨之间的距离来实现苗夹进入夹紧导轨后逐渐闭合,夹紧葱苗,然后在合适的位置逐渐打开完成投苗。夹紧导轨使苗夹逐渐闭合,是为了避免葱苗被夹取时造成的损伤,同时也减小了由于突变引起的机构运动冲击。
通过对喂苗机构和投苗机构的合理设计和安装,实现苗夹在竖直方向与对应的苗槽高度一致,保证准确夹取苗槽中的葱苗;在喂苗机构、投苗机构和拖拉机之间通过合理的传动方案,实现苗夹和苗槽在竖直方向运动的同步,以及苗夹在作水平方向运动时速度与移栽机前进的速度大小相等、方向相反,实现零速投苗。操作人员向苗槽放苗是在苗槽的水平运动段,随即苗槽转为竖直运动,当葱苗随着苗槽转为竖直运动后,相应的苗夹也进入竖直轨道,在适当位置,苗夹逐渐夹紧,夹住对应苗槽中的葱苗。喂苗机构和投苗机构继续运动,当苗槽的运动方向偏离竖直运动时,葱苗和苗槽分离。苗夹随投苗输送链继续运动,当苗夹转过900后,转为水平运动,其速度与移栽机前进的速度大小相等、方向相反,实现在一段时间内的葱苗相对于地面速度为零,在这期间完成对葱苗的覆土和镇压,之后苗夹在夹紧导轨的控制下,逐渐打开放开葱苗。由于苗夹作水平运动有一个时间段,覆土镇压装置有充分时间在葱苗相对地面速度为零的情况下对葱苗覆土压实,因此移栽后的葱苗直立性好、株距均匀等。
2关键部件的设计
2.1苗夹的设计
苗夹在大葱移栽过程中起到最终执行的功能,苗夹通过苗夹座安装在投苗机构输送链的每个链节上,苗夹从对应安装在喂苗机构输送带上的苗槽中夹取葱苗,苗夹的夹苗点的准确性,关系到葱苗最终的栽植效果,因此苗夹结构设计要合理。苗夹主要由苗夹板、弹簧、牛眼万向轮、销子、苗夹座和滚轮等组成
2.2芯铧式开沟器设计
芯铧式开沟器的设计要考虑以下影响因素:
(1)芯铧式开沟器的主要作用是保证葱苗移栽的直立性。犁铧式开沟器在开沟过程中会有部分土壤回流,葱苗被苗夹夹持在由竖直转向水平方向运动时,会被回流的土壤阻碍,以至于葱苗会出现窝根,葱苗被碰倾斜。为了避免这种现象发生,安装芯铧式开沟器,需要使翼板加长。
(2)苗夹的运行轨迹,葱苗的夹持点位置,需要将芯铧式开沟器设计成高度可以调节,根据实验来选取最合适的安装高度。由于芯铧式开沟器和覆土镇压轮配合使用来完成葱苗的覆土镇压。
综合以上因素,芯铧式开沟器设计的宽度B=120mm,两翼板之间的距离 b=100mm,翼板夹角γ=600。
2.3投苗链条限位导轨设计
投苗链条限位导的作用:苗夹通过苗夹座安装在投苗机构输送链上,链条在运行过程中会出现波动,因此会带动苗夹波动,这样会造成苗夹的夹苗点位置的不确定,同时由于波动,相临苗夹会产生干涉,以至于无法完成移栽。在这种情况下安装限位导轨,根据苗夹的运动规律,设计出限位导轨的形状,在限位导轨上铣出凹槽,使得苗夹在竖直和水平方向运动时,苗夹座两端的限位板在凹槽内运动,限制苗夹的抖动;为了减小苗夹座与限位导轨凹槽之间的摩擦力,采用滚动摩擦代替滑动摩擦,在每个苗夹座的四个角安装滚轮。
2.4夹紧导轨设计
夹紧导轨的作用是控制苗夹的开闭:根据苗夹的运动轨迹,在竖直到水平方向上,苗夹需要完成葱苗的夹取和投放。在此过程中夹紧导轨控制苗夹的打开和夹紧,为了减小苗夹运行过程受到的摩擦力,在苗夹上安装牛眼万向轮。具体完成过程是,苗夹在进入竖直方向运动时,万向轮开始进入夹紧导轨,两导轨之间的距离会逐渐减小,然后保持该距离,从而使苗夹逐渐夹紧,然后在夹紧的状态下竖直运动一段距离。接着苗夹随输送链转入水平运动,苗夹仍处于夹紧状态下,在距苗夹张开点5cm覆土镇压轮开始覆土镇压,使葱苗的零速投放在一个时间段内,提高葱苗移栽后的直立度。之后两夹紧导轨之间的距离逐渐增大,苗夹逐渐打开与葱苗脱离,完成葱苗的投放。
3总结
大葱在我国部分地区成为了当地主导型经济作物,其种植面积大,农民劳动强大,对于机械移栽迫切需求。实现大葱移栽机械化,存在两个难点:一、大葱的分苗;二、大葱移栽后的高直立度。
本文主要针对大葱移栽后的高直立度做了相关研究。主要研究结果如下:
(1)根据大葱移栽的特性,选择了链夹式大葱移栽机。
(2)通过喂苗机构和投苗机构相互配合,实现定距喂苗。在“零速投苗”的前提下设计相应的传动系统。
(3)确定了最终的链式传输方案,主要包括:投苗、喂苗输送带的功能设计,链围的设计和安装。根据零速栽植的宗旨,以及株距的要求,进行了移栽机的传动方案设计,通过理论计算选择合适的传动比,选择合适的输送带。
(4)对投苗机构进行动力学分析,通过理论计算,计算出了整个移栽机所需的牵引力、牵引功率等。并对主要零部件进行了机构合理性的分析,如限位导轨、苗夹、夹紧导轨和开沟器等。
但是由于时间仓促等原因造成研究不足,在以下几个方面可以做进一步研究:
(1)葱苗标准化育苗:通过田间试验可以看出,苗的大小、形态质量好坏对移栽的效果很明显,如果葱苗较直、挺实则在移栽过程中能够提高取苗的准确率。
(2)机组结构:整个机组显得结构太大,造成了重心较为靠后,机构看起来不紧凑。今后需要对机构进行更合理的设计。
这是我们在大学期间所进行的一次非常全面的设计,为大学四年所学知识的全面总结和巩固,使我们初步了解和掌握做设计的基本步骤、基本方法,通过本环节把我们在大学期间所学课程中所获得的理论知识在设计实践中加以综合运用,把大学四年来所学的知识贯穿起来,使理论知识和生产实践密切的结合起来,为我将来的实际工作打下了坚实的基础。
参考文献
[1]黄于明,赵章忠编著.葱蒜类蔬菜栽培技术[M].
上海科学技术出版社,1996.
[2]蹼良贵,纪名刚.机械设计[M].北京:高等教育出
版社,2001.6.
[3]成人先.机械设计手册第 3 卷[M].北京:机械工
业出版社,2008.1.
[4]李宝筏.农业机械学[M].北京:中国农业大学出版
社,2003.7.
[5]哈尔滨工业大学理论力学教研室.理论力学第六
版[M].北京:高等教育出版社,2002.
[6]杨可桢,程光蕴,李仲生.机械设计基础第五版
[M].北京:高等教育出版社,2007.
[7]武科,陈永成,毕新胜.几种典型的移栽机[J].新
疆农机化,2009(03):12-14.
[8]韩占全,封俊,曾爱军.我国旱地栽植机械的现
状和发展前景[J].现代化农业,2000(08):29-31.
[9]胡军,封俊,曾爱军,秦贵,王永涛.大葱移栽机
的现状与发展前景[J].农机化研究,2002(01):
39-41.
[10]金诚谦,吴崇友,袁文胜.链夹式移栽机栽植作
业质量影响因素分析[J].农业机械学报,
2008(09):196-198.
[11]孔卓.棉花移栽机的虚拟样机设计[D]山东理工
大学,2006.
[12]熊耐新.棉花裸苗移栽机构设计与试验研究[D].
湖南农业大学,2011.
[13]潘启明.杨树速丰林扦插作业技术装备的设计
与研究[D].东北林业大学,2010.
[14]肖卫兵.烟草移栽机栽植器的设计与试验研究
[D].湖南农业大学,2010.
[15]胡军.挠性圆盘式大葱移栽机的优化设计与试
验研究[D].中国农业大学,2003.
[16]章世秀.油菜移栽机的研制[D].南京农业大学,
2009.