目录
1设计的目的及意义 3
2原理方案设计 4
2.1功能分析 4
2.2工作原理分析 4
2.3功能分解 4
2.3.1电动机 4
2.3.2传动系统 4
2.3.3真空吸盘 5
2.3.4 清洁刷 5
2.4功能求解 6
2.5方案评价 7
2.5.1对各评价目标评分 7
2.5.2按加权计分法求各方按总分 8
2.6原理方案简图 8
3.结论 9
4.参考文献 10
摘 要
本次所研究的是高空自动擦玻璃装置的设计与制作设,计要求是结构简单,操作方便,成本低,自动化性能高,适合高空使用。
本设计首先应用solidworks等软件对高空自动擦玻璃装置进行概念设计,完成其三维实体造型,然后运用solidworks的运动模拟功能,完成产品的运动模拟与分析,在结构设计完成后运用AUTO CAD软件绘制零件的工程图。高空自动擦玻璃装置工作时,气动真空模块可使吸盘产生足够吸附力,使装置吸附在玻璃上;以电机为动力,带动清洁刷旋转实现擦玻璃动作,并且通过PLC控制可以自动喷水;通过楼顶电机与绳索实现装置上下运动,清洁刷可拆卸,可根据玻璃大小选择合适的清洁刷尺寸,提高效率。
现在越来越多的各种各样的摩天大楼成为了现代都市的标志,但是高层建筑中的玻璃清洗已经成为了一个越来越突出的事情,本设计的是一款使用方便、清洁能力强,住户可自行操作的玻璃清洁器,所以具有广泛的市场前景。
关键词:高空自动擦玻璃装置;自动喷水控制;旋转刷头
1设计的目的及意义
在现代都市中,高层建筑越来越多,各种各样的摩天大楼成为现代都市中一道亮丽的风景。在建筑业,由于玻璃的采光性好,保温防潮性能好,彩色玻璃实用美观,高层建筑的外壁越来越多地采用玻璃幕墙结构,但是为了保证建筑外观的整洁美丽,时间一长,就需要对壁面进行清洗,以美化市容市貌。许多开放性城市都规定,每年应对高楼清洗若干次。
目前高层建筑玻璃幕墙的清洗方法主要有两种,一种是靠升降平台或吊篮承载清洁工进行玻璃幕墙的清洗,虽简便易行,但劳动强度大,工作效率又低,属于高空极限作业对人身安全及玻璃壁面都有很大的威胁性。另一种是用安装在楼顶的轨道及吊索系统将擦窗机对准窗户进行自动擦洗。这种方式初次投资成本较高(高达数百万元),而且要求在建筑物设计之初就要考虑擦窗系统,因而限制了其使用,因此急需一种能代替人而又有一定灵活性和适用性的自动机器来完成这项工作,而且玻璃幕墙一般面积较大,大多处于几十米甚至上百米的高处,且周围无可攀援的支架,这就使得玻璃幕墙的清洗成为一项繁重、危险、耗资的工作。如果用人去清洗,不仅花费高,而且安全难以保证。特别是目前一些国家和地区已经通过立法对包括擦窗作业在内的人工高空攀爬进行了限制,人们不得不寻找其它解决办法。
高层建筑清洗机器人正是在这种背景下应运而生。它的出现将极大降低高层建筑的清洗成本,改善工人的劳动环境,提高生产效率,也必将极大地推动清洗业的发展,带来相当的社会效益、经济效益。因此,国内外多家研究机构都在积极开展此项研究工作。
2原理方案设计
高空自动擦玻璃装置结构简单,使用方便,有效降低清洁玻璃幕墙的危险系数。
2.1功能分析
采用“黑箱法”



总功能:降低高空清洁玻璃的危险系数
2.2工作原理分析
高空自动擦玻璃装置能够实现吸附于玻璃表面,并对玻璃进行自动清洁,实现替代清洁工的目的,降低清理的危险。
高空自动擦玻璃装置工作时,气动真空模块可使吸盘产生足够吸附力,使装置吸附在玻璃上;以电机为动力,带动清洁刷旋转实现擦玻璃动作,并且可以自动喷水;通过楼顶电机与绳索实现装置上下运动,清洁刷可拆卸,可根据玻璃大小选择合适的清洁刷尺寸,提高效率。
2.3功能分解
2.3.1电动机
根据所需的动力源要求选择电动机型号: Y132S-4封闭式三相异步电动机
查得型号Y132S-4封闭式三相异步电动机参数如下
满载转速1440 r/min
同步转速1500 r/min
2.3.2传动系统
减速器类型选择:选用展开式两级圆柱齿轮减速器。
特点及应用:结构简单,但齿轮相对于轴承的位置不对称,因此要求轴有较大的刚度。高速级齿轮布置在远离转矩输入端,这样,轴在转矩作用下产生的扭转变形和轴在弯矩作用下产生的弯曲变形可部分地互相抵消,以减缓沿齿宽载荷分布不均匀的现象。高速级一般做成斜齿,低速级可做成直齿。
减速器简图: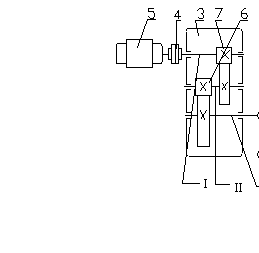
2.3.3真空吸盘
真空吸盘采用了真空原理,即用真空负压来“吸附”工件以达到夹持工件的目的。如图1 所示:通气口与真空发生装置相接,当真空发生装置启动后,通气口通气,吸盘内部的空气被抽走,形成了压力为P2 的真空状态。此时,吸盘内部的空气压力低于吸盘外部的大气压力P1,即P2 < P1,工件在外部压力的作用下被吸起。吸盘内部的真空度越高,吸盘与工件之间贴的越紧。
真空吸盘吸附原理图
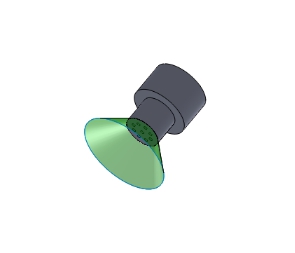
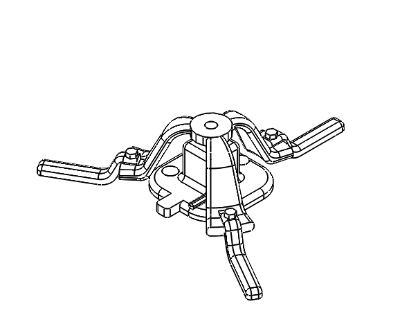
2.3.4 清洁刷
采用轻金属材料制造而成,既增加了清洁刷的强度和使用寿命,又降低了整体系统的重量,一举两得。新颖的设计既美观又实用,可以满足用户的要求。

清洁刷简图
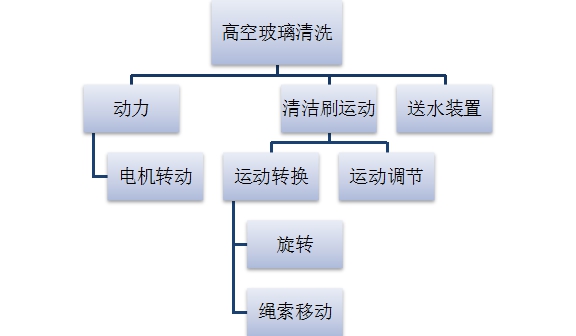
2.4功能求解
探求各功能元解并列出形态学矩阵综合表,如表2.1所示。
表2.1 挑选器的形态学矩阵综合表
|
 功 功
能
元
|
1
|
2
|
3
|
4
|
|
A
|
动力传递
|
齿轮传动
|
链传动
|
带传动
|
蜗杆传动
|
|
B
|
旋转运动
|
轴
|
涡轮蜗杆
|
齿轮
|
|
|
C
|
运动调节
|
离心调速
|
飞轮
|
|
|
|
D
|
送水装置
|
管式
|
盒式
|
袋式
|
|
|
E
|
动力源
|
电动机
|
汽油机
|
柴油机
|
气动马达
|
可能组合的方案数N为
N=4×3×2×3×4=288
考虑到机器工作的环境及所需要的平稳性与操作性的要求,以及工作强度等等,故初步选择以下两种方案。
方案一:电动机→齿轮传动→齿轮轴→清洁刷
方案二:电动机→涡轮传动→蜗杆→清洁刷
2.5方案评价
采用评分法进行评价。
挑选器大概有5个评价目标,且依次为运行平稳性、操作可行性、经济性、寿命、维修性。下表为评分标准。
表2.2 评分标准
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
|
差
|
较差
|
勉强可用
|
可用
|
中
|
良
|
较好
|
好
|
优
|
理想
|
下表为挑选机各评价目标及加权系数比较
表2.3 挑选机评价目标及加权系数比较
|
评价目标
|
平稳性
|
安全性
|
经济性
|
寿命
|
维修性
|
|
加权系数
|
0.3
|
0.3
|
0.1
|
0.2
|
0.1
|
2.5.1对各评价目标评分
对两种方案的各项性能进行评分,如下表所示。
表2.4 两种方案的性能评分
|
评价目标
|
方案一
|
方案二
|
|
平稳性
|
9
|
7
|
|
安全性
|
9
|
8
|
|
经济性
|
8
|
7
|
|
寿命
|
8
|
8
|
|
维修性
|
8
|
7
|
2.5.2按加权计分法求各方按总分
方案一:N=9×0.3+9×0.3+8×0.1+8×0.2+8×0.1=8.6
方案二: N=8×0.3+9×0.3+7×0.1+8×0.2+7×0.1=8.2
因为方案一总分高于方案二,所以选择方案一为最佳方案。
2.6原理方案简图
3.结论
设计出了一个完整的高空自动擦玻璃装置。整个装置包括真空系统设计、清洗系统设计、PLC程序设计等几个部分,并对系统的运动进行了分析,全面了解了这种装置的结构和功能。
经过对进行设计分析以及计算,运用到了很多机械设计方面的知识。而且还查阅了很多资料,包括上网和图书馆,收益颇丰。另外过程中还提高了识图、制图、运算和编写技术文件的基本技能。因此,可以说本次创新设计为毕业后走向社会从事相关技术工作打下良好的基础。
另外感谢周老师提供我们这次锻炼的机会,提高了我们对课本知识的应用能力及团队协作能力。
4.参考文献
[1]王园宇,武利生,李元宗.壁面清洗机器人发展趋势浅析.引进与咨询.2002.4
[2]陈沛富.玻璃幕墙清洗机器人设计研究.重庆大学硕士学位论文.2006.5
[3]宗光华.高层建筑擦窗机器人.机器人技术与应用.1998:20
[4]杨其嘉.机器人清洁工现状及未来.环境导报.1994.3
[5]吴仲治,李开生,王巍,宗光华.灵巧擦窗机器人速度跟踪控制系统.制造业自动化.Vol23.No.4;2001:2卜30
[6〕张兆君,周廷武,宗光华.擦窗机器人在高层建筑清洗中的应用.建筑技术.2001.9
[7]蔡立群.窗玻璃清洗机器人.住宅科技.1994.11
[8]邵浩,赵言正,王炎,刘淑霞,刘淑良.用于玻璃幕墙清洗作业的爬壁机器人系统.制造业自动化.2000.2
