|
研究意义:
目前高层建筑玻璃幕墙的清洗方法主要有两种,一种是靠升降平台或吊篮承载清洁工进行玻璃幕墙的清洗,虽简便易行,但劳动强度大,工作效率又低,属于高空极限作业对人身安全及玻璃壁面都有很大的威胁性。另一种是用安装在楼顶的轨道及吊索系统将擦窗机对准窗户进行自动擦洗。这种方式初次投资成本较高(高达数百万元),而且要求在建筑物设计之初就要考虑擦窗系统,因而限制了其使用,因此急需一种能代替人而又有一定灵活性和适用性的自动机器来完成这项工作,而且玻璃幕墙一般面积较大,大多处于几十米甚至上百米的高处,且周围无可攀援的支架,这就使得玻璃幕墙的清洗成为一项繁重、危险、耗资的工作。如果用人去清洗,不仅花费高,而且安全难以保证。特别是目前一些国家和地区已经通过立法对包括擦窗作业在内的人工高空攀爬进行了限制,人们不得不寻找其它解决办法。
高层建筑清洗玻璃擦洗器正是在这种背景下应运而生。它的出现将极大降低高层建筑的清洗成本,改善工人的劳动环境,提高生产效率,也必将极大地推动清洗业的发展,带来相当的社会效益、经济效益。因此,国内外多家研究机构都在积极开展此项研究工作。
研究预期目标:
1.设计出一个完整的水射流式清洗玻璃擦洗器系统。整个系统包括结构设计、驱动系统设计、擦洗机构分析。对玻璃擦洗器作业中的具体行走路径进行了规划,并对整个玻璃擦洗器运动的液压控制原理进行分析,来保证玻璃擦洗器的正常工作。
2.与传统的玻璃擦洗器体积大,结构复杂,需要配备一个大大的气泵相比,本玻璃擦洗器充分运用水的功能,既作为清洁剂,又是动力源。
3.对系统中的主要元器件进行参数设计及选型,并详细介绍其主要性能参数。
研究基本内容:
设计一款可以在高空安全擦洗玻璃的清洗器,要求在擦洗过程中动作顺畅,机构灵活。
可以说实现高空安全工作,装置简单、轻便。外形美观,方便拆卸。可实现厚度为5mm-32mm的高空玻璃的擦洗。
首先对玻璃擦洗器总体方案进行介绍,在此基础上,对玻璃擦洗器总体结构进行设计分析。其次重点介绍玻璃擦洗器的驱动机构,讨论玻璃擦洗器的作业路径及运动控制规划。最后,简单介绍玻璃擦洗器的擦洗机构。
方案论证:
运用水射流式清洗玻璃擦洗器,能够巧妙地把供水,供能,抽气整合为一体。利用清洁水流经射流发射器时产生的负压来控制吸盘,玻璃擦洗器可以抽真空吸附在玻璃上。这样就不像现已有的玻璃擦洗器那样,需要带上一个大大的气泵。再利用水流经射流发射器产生的被压来推动活塞杆,实现玻璃擦洗器的爬行驱动。
为此,我们在结构上采用了2个带活塞杆吸盘互相运动,来实现玻璃擦洗器的一直往前爬行运动,而避免只有一个活塞吸盘能实现的往复运动。在再整体结构上带上2个拖把,随着玻璃擦洗器的移动而移动来擦洗玻璃。结构如图1
这种结构的该玻璃擦洗器,总体来说,具有如下特点:
1.模块化设计,整个外形由同一种高分子有计划和工程材料组成,便于连接和控制。
2.结构简单紧凑,重量轻,同一动力实现吸附和爬行运动两种功能,减少动力来源。便于协调控制。
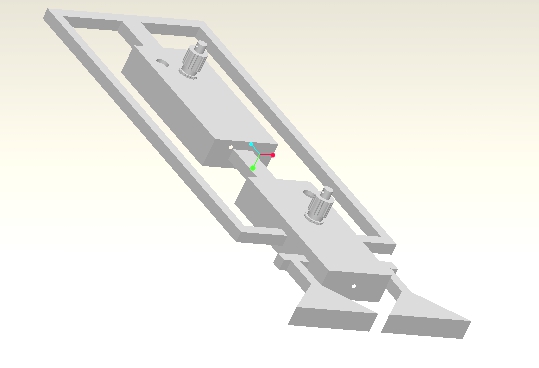
图1
这款玻璃擦洗器在总体结构上轻巧,简单,把玻璃清洁玻璃擦洗器两个最重要的部分:
吸附机构和擦洗机构巧妙地融合在一起,减少了以其它动力来实现这两种功能的复杂性,
具有很好的研究前景。
设计思路:
玻璃擦洗器是传统的机构学与近代电子技术相结合的产物,是计算机科学、控制论、机构学、信息科学和传感技术等多学科综合性高科技产物,它是一种仿人操作、高速运行、重复操作和精度高的自动化设备。所以该气动清洗玻璃擦洗器系统包括机械结构、运动规划、传感器系统、驱动系统、控制系统等几部分。
由于我们所开发的清洗玻璃擦洗器工作场所的特殊性,本课题在玻璃擦洗器结构上的设计思想是:在保证玻璃擦洗器功能的前提下,力求结构简单、可靠性高、运行稳定。因为爬壁玻璃擦洗器在行进过程中需要克服自身重力,所以较轻的玻璃擦洗器本体结构是一个需要着重考虑的设计因素。增加机器结构的灵活性,导致的结果是机械结构变得复杂,需要使用到的机械元器件增多,重量必然增加,同时控制的复杂性也增加。
高空幕墙清洗玻璃擦洗器是一种爬壁玻璃擦洗器,因此,它必须具备两大功能:负壁和移动功能。
在本玻璃擦洗器系统中,考虑到玻璃擦洗器要有清洗功能,我们就到了水作为清洁剂来清洗,在提供水的过程中,我们又把它当做动力源,可以说只要有水就能让它工作。因此我们主要考虑到了用水射流式清洗玻璃擦洗器。
|
