摘要
液压挖掘机是工程机械的重要产品之一,具有较高的技术含量。工作机构是液压挖掘机的主要装备,机构各铰点以及其具体结构的设计将是决定工作机构性能水平的重要因素,决定了液压挖掘机的工作性能,影响其最终使用性能的好坏,所以对液压挖掘机工作机构的研究是十分有必要的。液压挖掘机的主要特点为:能无级调速且调速范围大,能得到较低的稳定转速,快速作用时,液压元件产生的运动惯性小,加速性能好,并可作高速反转,传动平稳,结构简单,可吸收冲击和振动,操纵省力,易实现自动化控制,易于实现标准化、系列化、通用化。
本次设计的题目是多功能挖掘机工作装置设计。这种类型的挖掘机与其它类型的挖掘机相比,因有良好的性能而应用最广,对松软地面或沼泽地带还可采用加宽、加长以及浮式履带来降低接地比压。
本次设计完成的主要任务有:挖掘机的类型及发展概况、液压挖掘机的总体设计液压挖掘机工作阻力的计算、液压挖掘机工作装置的设计、液压挖掘机工作装置的受力分析和强度校核、挖掘机工作装置液压系统的设计、挖掘机工作装置的运动仿真
本次设计的主要参数是斗容量1.0m3,它属于中小型液压挖掘机,主要设计挖掘机的工作装置及进行运动仿真。挖掘机的工作装置是直接完成挖掘任务的装置,本设计对工作装置的各个组成部分进行了较为详细的设计,这其中包括了动臂、斗杆和铲斗及其驱动装置的设计。
在设计中,采用了履带式行走装置,来满足要求。上部转台是全回转式,因此它可在一个更大的范围内工作。又因采用液压传动控制而使整机性能得以改善。与机械式挖掘机相比,其挖掘力提高到2~3倍,整机质量为25吨,最大卸载高度约为4.53m,最大挖掘深度5.99m,最大挖掘半径约为9.795m,从中可以看出整机作业能力有了很大的改进,不仅挖掘力大,且机器重量轻,传动平稳,作业效率高,结构紧凑。
关键词:液压挖掘机 工作装置 液压系统 运动仿真
ABSTRACT
Construction machinery hydraulic excavator is one of the most important products which has high technical content. Working mechanism is the main equipment of hydraulic excavator, each joint point and the design of the concrete structure are important factors to decide the working mechanism of the performance level, determining the working performance of hydraulic excavator, which influence the use performance is good or bad, so the research of hydraulic excavator is very necessary. The main characteristics of hydraulic excavator is as follow: It has a stepless speed regulation and wide speed range, it can obtain stable low speed, when action quickly, the hydraulic parts produce a small inertia and good acceleration performance, and it can be used for high speed reversal, produce smooth transmission, simple structure, can absorb the impact and vibration, labor-saving operation, it is easy to control automatically and realize the standardization, seriation and generalization.
The topic of the design is the design of WY100 hydraulic crawler excavator overall and the working device and motion simulation for the working device. Compared with the other types of excavator this type of excavator have good performance so used widely, it can reduce ground pressure by widening, lengthening and floating crawler for soft ground or marshes. The main tasks of the design are: Types and the development of the excavator, the overall design of hydraulic excavator, the working resistance calculation of the hydraulic excavator, the design of the working device ,stress analysis and strength check calculation of the working device, the hydraulic system design of the excavator working device , the motion simulation of excavator working device
The main parameter of the design is bucket capacity 1.0m3, it belongs to the small and medium-sized hydraulic excavator, the main tasks are the design and motion simulation of working device of excavator. The working device is the equipment that completes the task of mining directly, all the design of the work device components are designed in detail including the design of the boom, stick and bucket and a driving device.
This design used the crawler walking device to meet the requirements of the excavator. The upper part of the excavator is a full rotation swivel table so it can work in a greater scope. Because of the use of hydraulic drive control and make the machine performance can be improved. Compared with the mechanical excavators, the mining capacity increased to 2 ~ 3 times, the quality of the machine is 25 tons, the maximum discharge height is about 4.53M, the maximum digging depth is 5.99M, maximum digging radius of about 9.795m, can be seen from the operation ability has been greatly improved, not only the mining capacity but the light weight, smooth transmission, high efficiency and compact structure.
Keywords: hydraulic excavator working device hydraulic system motion simulation
目录
第1章 绪论・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・1
1.1挖掘机作用及其发展概况・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・1
1.2挖掘机的分类・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・2
1.3单斗液压挖掘机的特点、类型・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3
1.4设计题目简介・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4
第2章 总体设计・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・8
2.1 总体设计内容及原则・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・8
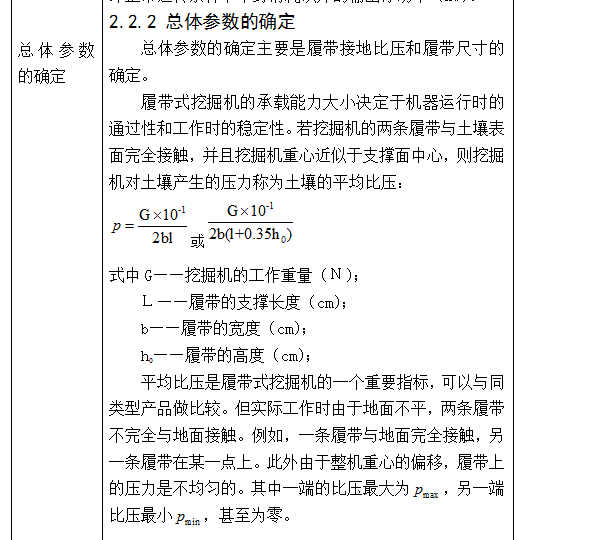
2.2 选择确定总体参数・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・8
第3章 挖掘机工作阻力・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・15
3.1 工作液压缸的理论挖掘力・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・15
3.2 整机挖掘力・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・16
3.3整机实际挖掘力・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・17
第4章 工作装置设计・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・18
4.1 设计要求・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・18
4.2 反铲工作装置结构方案的确定・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・18
4.3铲斗设计・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・24
4.4动臂机构设计・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・27
4.5斗杆机构的设计・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・31
4.6铲斗连杆机构的设计・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・32
第5章 工作装置受力分析和强度验算・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・35
5.1铲斗及铲斗连杆机构分析・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・35
5.2斗杆及斗杆机构分析・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・36
5.3动臂及动臂机构分析・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・43
第6章 工作装置液压系统设计・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・49
6.1挖掘机工况特点和对液压系统的要求・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・49
6.2液压系统主要类型和特点・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・51
6.3液压挖掘机的基本回路和辅助回路・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・52
6.4液压系统图・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・54
第7章 运动仿真・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・56
7.1 引言・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・56
7.2 Solidworks模拟仿真的基本概述・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・56
7.3 Solidworks动画模拟仿真的概述・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・57
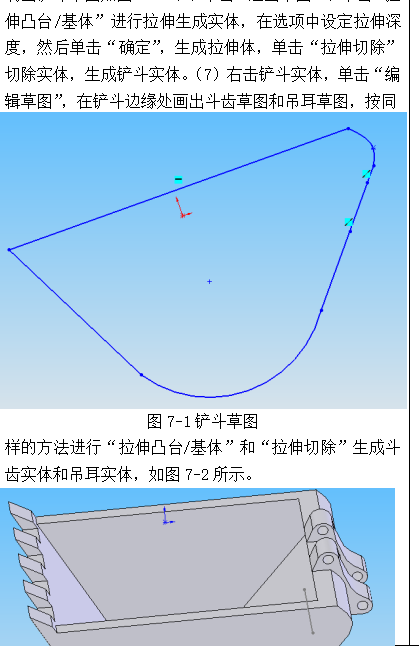
7.4 液压挖掘机工作装置的三维实体建模・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・57
7.5 液压挖掘机工作装置的三维实体装配・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・62
第8章 毕业设计小结・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・64
第9章 致谢・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・66
参考文献・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・67